
Создание КА представляет собой одну из сложнейших задач, с которой когда-либо сталкивался человек, что связано с множеством самых разнообразных и нередко трудно формализуемых факторов, вовлекаемых в процесс разработки.
Первым шагом в проектировании КА является решение вопроса о конструктивно-компоновочной схеме и распределении масс между целевой нагрузкой и служебными системами, основными из которых являются: система электропитания, система ориентации и стабилизации и система терморегулирования (СТР), а также конструкция как отдельная система [1].
Для стабильной работы некоторой аппаратуры на КА необходимо поддержание ВС температуры посадочного места под аппаратурой. Данная задача реализуется прибором коммутации питания на электрообогревателях (ЭО) совместно с ПО СТР.
Для обеспечения точности отсчета времени существуют приборы (эталоны времени), в которых при значительном изменении температуры увеличивается временная погрешность. Для исключения этого необходима стабилизация температуры [2].
Существуют 3 режима:
- режим ВС (должна обеспечиваться температура посадочного места в диапазоне 17,1 — 17,6 0С);
- режим хранения (для того чтобы прибор не замёрз, температура поддерживается в диапазоне от минус 20 до минус 10 0С);
- режим пониженной мощности (прибор готовится к работе — температура держится в диапазоне 13 – 18 0С) [3].
В данном случае для регулирования ВС температуры на посадочном месте аппаратуры применяется метод, изображенный на рисунке 1.
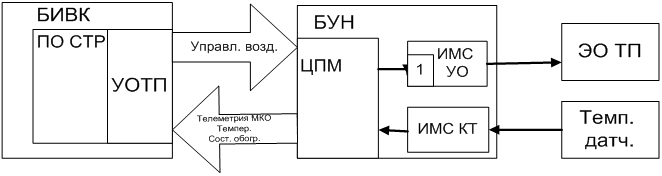
Рисунок 1. Структурная схема управления ВС от ПО СТР (1 – блок временной модуляции)
ПО СТР дает команду на включение блока временной модуляции.
Для компенсации временной задержки, которая составляет 4 секунды, при обмене по мультиплексному каналу обмена (МКО) в БУН существует схема модуляции скважности работы обогревателя [4].
На рисунке 2 представлена функциональная схема режима ВС в ПО бортовой вычислительной машины.
 Рисунок 2. Функциональная схема режима ВС в ПО бортовой вычислительной машины
Рисунок 2. Функциональная схема режима ВС в ПО бортовой вычислительной машины
Имеются недостатки существующего процесса:
1) зависание центрального приборного модуля (ЦПМ) в БУН;
2) зависание бортового интегрированного вычислительного комплекса (БИВК);
3) в случае временного отказа БИВК или неполадок по каналу МКО алгоритм не работоспособен (ВС температуры посадочного места поддерживаться не будет).
Для устранения перечисленных недостатков можно модернизировать структурную схему управления высокой стабильности от ПО СТР и реализовать ее.
Таким образом, необходимо исследовать существующую схему. Далее для устранения перечисленных недостатков необходимо разработать алгоритм прямого управления ЭО в режиме ВС, при помощи которого можно управлять ЭО с частотой работы алгоритма. В связи с этим компенсацию временной задержки (схему дискретного включения) можно исключить. После этого необходимо разработать структурную схему регулирования обеспечения стабильности температуры.
Структурная схема управления высокой стабильности от ПО БУН представлена на рисунке 3.
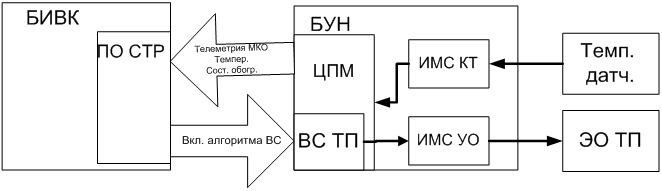
Рисунок 3. Структурная схема управления ВС от ПО БУН
При включении режима ВС производится прямое управление обогревателями программным модулем ВС ТП.
Время включенного или отключенного состояния обогревателя определяется алгоритмом ВС ТП в зависимости от температуры.
Функциональная схема ВС в ПО БУН представлена на рисунке 4.
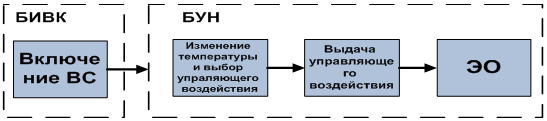
Рисунок 4. Функциональная схема ВС в ПО БУН
Надежность системы в режиме ВС улучшается за счет:
- непосредственного управления обогревателями (независимость от состояния БИВК);
- исключения влияния нарушения обмена или сбоя по каналу МКО;
- сокращение количества электрорадио изделий блока.
Устранены недостатки предыдущей схемы: зависание БИВК или сбой по каналу МКО теперь не влияют на алгоритм обеспечения ВС температуры посадочного места.
На рисунке 5 представлен алгоритм регулирования ВС температуры в заданном диапазоне.
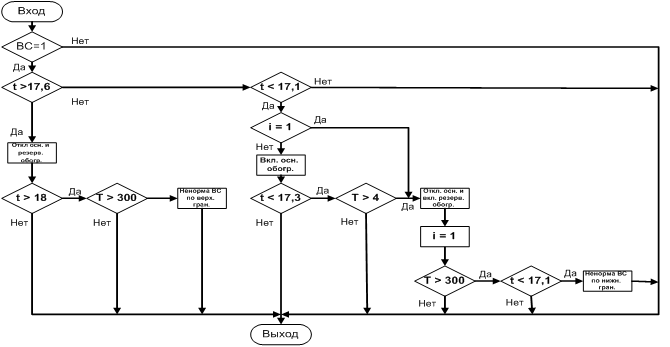
Рисунок 5. Алгоритм регулирования ВС температуры в заданном диапазоне (T — временной интервал, с; t — заданная величина температурного регулирования, °С)
В нашем случае стоят 2 обогревателя (основной и резервный).
Особенности алгоритма:
- отсутствие расчета скважности для компенсации временных задержек при регулировке температуры в режиме ВС;
- прямая коммутация обогревателей в зависимости от температуры;
- широкий спектр частоты коммутации обогревателя в зависимости от температуры;
- минимальное время во включенном состоянии обусловливается частотой работы программы (25мс);
- независимость от воздействия сбоев по каналу МКО;
- возможность изменения температурного диапазона регулирования.
Практическая значимость:
- простота в программной реализации системы;
- увеличение надежности системы;
- незначительное уменьшение массы (в зависимости от применяемых электро-радио изделий в блоке);
- независимость работы системы ВС от бортовой вычислительной машины.
Список литературы
- Гущин В.Н. Основы устройства космических аппаратов. М.: Машиностроение, 2003.
- Камалов В.С. Производство космических аппаратов. М.: Машиностроение, 1982.
- Максимов Г.Ю. Теоретические основы разработки космических аппаратов. М.: Наука, 1980.
- Чеботарев В.Е., Косенко В.Е. Основы проектирования космических аппаратов информационного обеспечения. Красноярск, 2011. — 487 с.[schema type=»book» name=»РАЗРАБОТКА АВТОНОМНОГО АЛГОРИТМА РЕГУЛИРОВАНИЯ ВЫСОКОЙ СТАБИЛЬНОСТИ ТЕМПЕРАТУРЫ ПОСАДОЧНОГО МЕСТА БЛОКОМ УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ» description=»В данной статье описывается существующий метод поддержания высокой стабильности (ВС) температуры посадочного места под аппаратурой, которая применяется в космических аппаратах (КА), а так же модернизированная схема управления ВС. Приводятся функциональные схемы реализации режима ВС в бортовом комплексе управления (БКУ) и в программном обеспечении (ПО) блока управления обогревателями (БУН).» author=»Леонов Сергей Николаевич, Головков Владимир Владимирович, Яковлев Иван Игоревич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2016-12-18″ edition=»euroasia-science_28.04.2016_4(25)» ebook=»yes» ]