
Введение. В настоящее время все большее распространение получают средства информационного контроля транспортной инфраструктуры государства. Этот процесс сопровождается внедрением различных технических систем в модели легковых и грузовых автомобилей. К ним можно отнести обязательные системы федерального значения, такие как ЭРА-ГЛОНАСС, ПЛАТОН, а также частные продукты, призванные осуществлять мониторинг транспортных средств (ТС) [1]. Вторая группа систем имеет различное целевое назначение в зависимости от заказчика установки, разработчика модели системы и конфигурации оборудования. Большинство рынка подобных систем реализуется в коммерческих перевозках и основано на контроле расхода топлива, пройденного пути и целостности маршрута каждого ТС. Основная цель применения подобных систем «частниками» – сокращение издержек на эксплуатацию транспортных средств. Однако, как считает автор, существуют возможности такой их доработки, которая позволит не только повысить эффективность мониторинга и контроля эксплуатации транспорта, снижая соответствующие издержки, но и повысить безопасность движения.
Для начала поясним суть работы существующих систем мониторинга. Их функционирование, как правило, предполагает выполнение стандартного набора процессов:
-сбор данных из подключенных к системе источников измерений, включая топливные, спутниковые и др. датчики;
-архивация и/или передача данных на сервер обслуживания системы;
-анализ данных на предмет наступления критических событий;
-оповещение диспетчера о критическом событии по запрограммированному протоколу.
Перечисленные процессы могут быть дополнены или изменены в отдельных случаях. Но, несмотря на все разнообразие представленных на рынке подобных систем мониторинга, все они, в конечном счете, имеют крайне низкий уровень автоматизации обработки накапливаемых данных. Под автоматизированной обработкой данных будем понимать процесс фильтрации измерений со всех доступных датчиков с целью определить качество эксплуатации транспортного средства и выразить этот показатель в единой шкале измерения. Те системы, в функциональность которых входит оценка качества эксплуатации транспортного средства, разработаны и внедрены в некоторые модели иностранной техники. Но, во-первых, их еще сравнительно мало, во-вторых, как считает автор, для полноценной работы таких систем необходимы специальные алгоритмы взаимодействия и обмена данными между транспортными средствами.
Помимо упомянутого случая некоторый опыт в части внедрения полноценных систем оценки качества эксплуатации уже имеют страховые компании, предлагающие водителям экономить при аккуратной езде, фиксировать которую должен специальный блок, поставляемый вместе со страховым полисом [2]. Здесь необходимо подчеркнуть такой момент: «побочным» эффектом внедрения подобной системы, осуществляющей контроль качества эксплуатации, безусловно, является актуальное для нашей страны повышение безопасности дорожного движения. Однако, значительное движение в сторону улучшения безопасности можно совершить лишь при широком распространении упомянутых систем мониторинга и тщательной доводке встроенных в них алгоритмов обработки информации.
В данной статье автор рассматривает два способа автоматизированной обработки информации в системах мониторинга транспорта и оценки качества эксплуатации с использованием статистических методов и облачных технологий, которые не требуют доработки существующих ныне и уже внедренных в ТС систем, но значительно расширяют их функциональность.
Варианты реализации алгоритмов оценки качества эксплуатации. Как известно [3], большинство методов оценки качества эксплуатации ТС основано на представлении его в виде объекта с фиксированным количеством параметров и последующем анализе его вектора состояния Xi (i – момент времени). В качестве измерений для оценки параметров объекта могут выступить любые данные с измерительных средств, стоящих на борту объекта и подключенных к системе мониторинга. Задачей анализа качества эксплуатации ТС в таком случае становится определение отклонения Xi от «идеального» вектора Xopt, характеризующий объект в его самом лучшем состоянии.
Данный подход имеет достоинство, состоящее в том, что при анализе эксплуатации необходимо учитывать всего один аспект, а именно: уровень рассогласования между текущим вектором параметров объекта Xi и его «идеальным» вариантом Xopt.
При использовании данного подхода возникает задача разработки способа количественного измерения рассогласования между Xi и Xopt в каждый момент времени, проводимого силами встроенной в систему мониторинга или вынесенной в «облако» программы. Кроме того, возникает проблема формирования «идеального» вектора. Для ее решения автор предлагает создавать априорно известные области каждого параметра вектора состояния объекта: допустимую, оптимальную и недопустимую. Обозначим эти области как F, O и Z соответственно. При этом всегда выполняется условие:
Oi ϵ Fi ϵ Wi,
Zi ϵ Wi (1)
где Wi – область возможных значений Xi .
С учетом сказанного, при оценке качества эксплуатации необходимо вычислять попадание каждого из параметров вектора состояния объекта в конкретную область. Чем «лучше» область, тем лучшей оценка качества при прочих равных должна получиться.
Предлагаемый вариант приводит нас к созданию минимизируемой функции потерь L, которая представляет собой число, пропорциональное пребыванию вектора состояния объекта в приведенных выше областях. Вычислить L можно лишь присвоив каждой области из F, Z и O для каждого параметра вектора Xi величину потерь при нахождении в ней в конкретный момент времени, а затем сложить все потери. При этом, ввиду неравной значимости отдельных компонент вектора состояния ТС, сложение должно производиться с учетом весов:
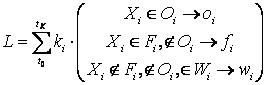 (2)
(2)
где ki – вес i-го параметра вектора состояния ТС в общей оценке, oi – потери из-за попадания в оптимальную область (по умолчанию 0), fi – потери из-за попадания в допустимую область, wi – максимальный балл, t0 – начало движения, tk – окончание движения.
Если измерения параметров Xi генерируются с различной частотой, то наиболее частые из них нужно брать средними внутри шага, с которым рассчитывается L (2). Это позволит убрать лишние шумы в быстрых измерениях. В конечном счете, необходимо провести нормирование коэффициента итоговых потерь на основе данных о выбранной частоте подсчета потерь и разнице времени tk – t0.
В итоге, с использованием описанного выше метода появляется возможность рассчитать качество эксплуатации ТС на основе вычисления агрегирующей функции потерь L. Еще раз подчеркнем, что в таком случае остается открытым лишь вопросы о присвоении величины потерь областям F, Z и O и о назначении весов ki параметрам объекта. Первый вопрос должен решаться на основе технических данных о рассматриваемом объекте. Весовые коэффициенты необходимо формировать с привлечением экспертных оценок и с учетом конкретных пожеланий заказчика касаемо эксплуатации ТС. В такой постановке все параметры приведенного алгоритма существуют вне системы оценки качества эксплуатации и являются ее входными данными. Изложенный способ организации алгоритма придает разрабатываемой системе необходимую гибкость.
Описанный в данном подразделе подход был реализован в составе программного обеспечения, установленного в системе мониторинга транспорта [4], а затем испытан на реальном объекте.
Оценка эксплуатации на основе апостериорных статистических характеристик параметров ТС. Описанный в предыдущем разделе способ вычисления функции потерь не всегда может быть применен для анализа некоторых параметров состояния объекта. Например, в случае, когда для анализируемых параметров вектора состояния ТС невозможно четко разграничить области его оптимальных, допустимых и недопустимых значений, либо когда границы этих областей постоянно меняются в процессе эксплуатации или зависят от внешних факторов. В такой ситуации функция потерь не покажет корректного измерения качества эксплуатации ТС. Более того, существует возможность, что более качественная эксплуатация вообще не означает сохранение параметра в конкретной зоне.
В связи со сказанным необходимо создание альтернативного способа оценки состояния объекта и учета параметров вектора состояния ТС, не укладывающихся в четкие области. В таком случае авторы считают необходимым проведение сравнительной оценки как можно большего числа реализаций параметров вектора состояния ТС. Алгоритм такого сравнения следующий:
— накопление реализаций параметров вектора состояния всех доступных для анализа ТС;
— классификация реализаций по отдельным маршрутам на основе алгоритма распознавания траекторий с использованием корреляционно-экстремального алгоритма;
— группировка реализаций по маршрутам и ТС;
— выделение 10% лучших реализаций для каждого маршрута среди всех ТС на основе минимума/максимума введенного диспетчером критерия;
— ранговая сортировка ТС на основе оставшихся 90% реализаций по каждому маршруту среди всех ТС;
Все перечисленные действия должны итеративно повторяться в целях сохранения актуальности получаемых оценок. Полученный рейтинг показывает качество эксплуатации отдельно по каждому ТС.
Разберем предлагаемый подход на конкретном примере анализа качества эксплуатации ходовой части ТС. В качестве критерия будем использовать дисперсии перегрузок, измеряемых установленными на ТС акселерометрами. Очевидно, что увеличенное значение дисперсии перегрузок при движении однозначно говорит о росте «колебаний» в процессе управления объектом, что позволяет судить о его низком качестве. С учетом предложенного подхода вычислить критерий для анализа эксплуатации ходовой части ТС можно на основе следующего соотношения:
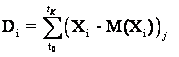 (3)
(3)
где Di – дисперсия перегрузки по i-му каналу, M(Xi) –математическое ожидание (среднее значение перегрузки), j – момент времени, i – номер канала (вертикальный, продольный, боковой).
Иногда показательной оценкой качества эксплуатации может служить M(Xi). Однако, как показали результаты испытаний, эта характеристика больше зависит от условий эксплуатации, чем от управления в этих условиях и потому в анализе должна применяться реже.
Результаты вычисления (3) для каждого ТС должны обрабатываться совместно, чтобы получить максимальную корректность итоговой оценки, делая ее независимой от условий эксплуатации ТС, к которым водитель не имеет непосредственного отношения.
Тестовая эксплуатация. Для испытания предлагаемых методов был разработан и установлен на транспортное средство прототип системы мониторинга. В целях снижения влияния внешних факторов на получаемые оценки качества эксплуатации на тестовой траектории движения было решено выбрать один и тот же маршрут с точностью до полосы движения. В прототип тестовой системы поступали следующие данные:
- Измеренные значения перегрузок;
- Угловые скорости вращения объекта вокруг собственной оси;
- Местонахождение;
- Путевая скорость;
Обработка генерируемых измерений проводилась согласно описанным в данной статье методам оценки качества эксплуатации ТС.
В целях сокращения объема статьи далее не будут приводиться графики изменения всех перечисленных параметров в различных режимах управления ТС. Вместо этого рассмотрим здесь полученные оценки дисперсий перегрузок, собранные в таблице 1.
Таблица 1 – Дисперсии перегрузок ТС в различных режимах движения.
| Описание режима эксплуатации (режима движения) | Значение дисперсии перегрузок, м2/с2 | ||
| вперед | вбок | вверх | |
| Скорость 100 км/ч | 0.47 | 0.26 | 0.57 |
| Скорость 120 км/ч | 0.69 | 0.52 | 1.06 |
| Скорость 130 км/ч | 1.3 | 0.25 | 1.03 |
| Движение в пробке, по возможности плавное | 0.49 | 0.30 | 0.40 |
| Движение в пробке, активное с перестроениями и ускорениями | 0.56 | 0.17 | 0.33 |
| Агрессивное движение в пробке | 1.34 | 0.35 | 0.70 |
Полученные результаты показывают строгую корреляцию между качеством эксплуатации и значением перегрузок. Как видно, в продольном и вертикальном направлениях значения дисперсий перегрузок возрастают при большей скорости движения, что вполне объяснимо, так как в таком случае меняются нагрузки на узлы и агрегаты автомобиля.
Отдельно стоит отметить тот факт, что управление в рваном, дерганом ритме приводит к тому, что значения перегрузок возрастают существенно (в 2-3 раза). Это означает, что объект (ТС) эксплуатируется агрессивно, несмотря на то, что скорость в подобных условиях сохраняется в допустимых пределах.
Таким образом, полученные в ходе реальных испытаний результаты анализа эксплуатации ТС показали, что разработанные алгоритмы формируют справедливую оценку качества, близкую к реальной действительности.
Заключение. Разработаны два подхода к оценке качества эксплуатации ТС, основанных на автоматизированной обработке измерительной информации, поступающей из систем мониторинга транспорта. Первый подход основан на расчете «потерь», вызванных эволюцией каждого параметра объекта (ТС), выходящей за пределы определенных областей, где его значение было оптимальным или допустимым. Второй подход основан на сравнении эволюций параметров транспортных средств путем выделения отдельных траекторий – маршрутов и вычисления для каждого из них набора лучших ТС в смысле минимума/максимума введенного критерия, по которому производится ранжирование.
Проведена тестовая эксплуатация прототипа системы, обеспечивающей оценку качества эксплуатации транспортного средства с использованием второго подхода. В качестве тестовых данных были выбраны значения перегрузок, действующих на транспортное средство при различных режимах движения.
Показана возможность системы решать поставленную задачу в части корректной оценки некачественного управления транспортом, основываясь на сравнительном анализе данных для множества траекторий движения транспортного средства.
Список литературы
- [Электронный ресурс], , 04.05.2016.
- [Электронный ресурс], , 04.05.2016.
- М.Н. Красильщиков, В.Н. Евдокименков, Д.А. Базлев. Индивидуально-адаптивные бортовые системы контроля технического состояния самолета и поддержки управляющих действий летчика. М: Издательство МАИ, 2011, 440 стр.
- Кружков Д.М., Якименко В.А. Оценка качества эксплуатации транспортного средства на основе обработки измерительной информации с использованием априорной функции потерь. Программа для ЭВМ.
Исследование выполнено при поддержке ФГБУ «Фонд содействия развитию малых форм предприятий в научно-технической сфере» в рамках Договора №5880 ГУ2/2015[schema type=»book» name=»МЕТОДЫ И АЛГОРИТМЫ ОЦЕНКИ КАЧЕСТВА ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ» description=»В статье описаны подходы к обработке данных из систем мониторинга, позволяющие провести оценку качества эксплуатации транспортных средств. Первый подход базируется на расчете специальной функции «потерь», возрастающей при эволюции каждого параметра транспортного средства вне оптимальной и допустимой областей его значений. Второй подход основан на сравнении эволюций параметров эксплуатации всех транспортных средств, выделении среди них лучших и сортировки согласно введенному критерию. В статье приводятся результаты тестовой эксплуатации прототипа систем мониторинга со встроенными алгоритмами, соответствующими второму подходу. На примере дисперсий перегрузок показано, что предлагаемые методы позволяют оценить качество эксплуатации транспортного средства.» author=»Кружков Дмитрий Михайлович, Якименко Вячеслав Анатольевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2016-12-18″ edition=»euroasia-science_28.04.2016_4(25)» ebook=»yes» ]