
Для России ускоренное освоение Крайнего Севера и Арктики, включая побережье и шельф арктических морей, является важным условием повышения экономического потенциала. Прежде всего, оно означает развитие базовых отраслей промышленности (горнодобывающей, нефтяной и газовой) с созданием соответствующей инфраструктуры, транспорта, связи.
Один из путей решения проблемы освоения Крайнего Севера и Арктики — применение беспилотных транспортных средств (БТС).
В настоящее время в мире разрабатываются беспилотные транспортные средства в основном для их использования в условиях города [1]. Однако автопилот при этом исследуется на автострадах с регламентированным движением. Электроника может ориентироваться внутри размеченных полос и заранее отслеживает приближение нужного поворота. Достаточно хорошо разработаны системы управления такими автомобилями даже по бездорожью.
Специалисты Jaguar Land Rover [2]. считают, что бездорожье тоже заслуживает автопилота, тем более, что разработка систем автономного вождения началась именно для машин повышенной проходимости военного назначения. В рамках первого демонстрационного заезда два Range Rover Sport были объединены при помощи беспроводной сети малого радиуса DSRC. Если водитель собирается свернуть с дороги, он должен по-прежнему чувствовать себя уверенно» и прежде чем нажать на газ, компьютеру требуется составить трехмерную карту окружающей поверхности. В отличие от автострад, где конфигурация местности находится в памяти управляющей программы, на бездорожье бортовому помощнику придется собирать информацию в режиме реального времени. Для этого он вооружен системой «Surface identification and 3D path sensing» с камерой, ультразвуковыми и лазерными датчиками, а также прибором LIDAR для кругового 3D-сканирования местности. Камера и LIDAR составляют цифровой план, а ультразвуковые датчики определяют тип поверхности на пять метров вперед, активируя тот или иной режим Terrain Response для асфальта, снега, песка или травы. Машина смотрит на объекты над и под машиной, фиксируя их высоту и прокладывая маршрут. К примеру, если на крыше закреплены велосипеды, то электроника не проложит маршрут под ветвями дерева. Кроме того, внедорожный автопилот работает на малых скоростях и умеет передавать информацию другим автомобилям, соединенным в колонну.
Наилучшие результаты по системам управления БТС достигнутs специалистами фирмы Nvidia [3] Эта компания разработала мощный графический процессор Titan Х с 12 гигабайтами памяти. Ядром видеокарты является чип GM с 3072 ядрами CUDA с 384-битной памятью. Указанные разработки уже используются американскими автопроизводителями. Поэтому платы Nvidia нами использованы в системах управления и диагностики.
Ученые Нижегородского технического университета им. Р.А.Алексеева уже имеют опыт применения технологии СUDA при разработки систем управлении и диагностики технологических систем в машиностроения [4,с. 36].
При движении транспортного средства в условиях Крайнего Севера и особенно Арктики, будут возникать значительные проблемы, где наибольшую трудность представляет разработка маршрута движения вследствие ограниченности информации о местности, сложности распознания объектов природы (склоны, горные и лесные массивы и т.д.). Для Арктики типичным является наличие безжизненной местности. Все указанное существенно затрудняет разработку маршрута и в целом движение БТС.
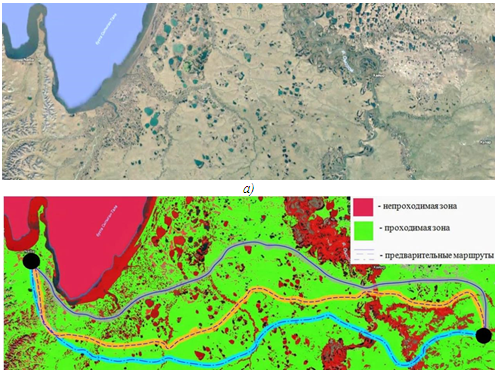
б)
Рисунок 1. а) Исходная карта со спутника; б) Предварительный анализ проходимости и прокладка предварительных маршрутов.
В Нижегородском государственном техническом университете им. Р.Е.Алексеева ведутся интенсивные пути решения указанных выше проблем. Принципиальным решением является то, что разработку маршрута движения для БТС предлагается проводить в 3 этапа. На первом этапе прокладка маршрута осуществляется как по снимкам из космоса (рисунок 1), так и по топографическим картам, на стационарном вычислительном центре.
На втором этапе производится подробное картографирование и создание 3D модели местности на основе полученных маршрутов. 3D модель формируется аэросъёмкой и лидаром, установленным на беспилотном летательном аппарате (БЛА). Два или более БЛА, модернизированные для использования их в Арктике (в условиях низких температур), поочередно выполняют полёты над маршрутом следования.
Выходными данными с БЛА будут 3D карта местности с привязкой по координатам и фотореалистичным видом.
На третьем этапе производится обработка полученных с БЛА данных и датчиков установленных на БТС. Как показало моделирование, прокладывание точного маршрута возможно уже на расстоянии до 15 метров от БТС с учетом особенностей рельефа и типа покрытия. т.е. снег, мерзлый грунт, вода и т.д.
На бортовом компьютере второй и третий этапы прокладки маршрута обрабатываются параллельно. На рисунке 2 показаны модули, входящие в бортовой компьютер
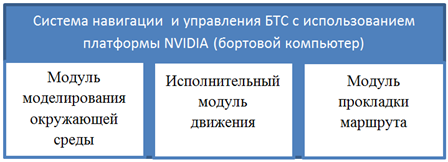
Рисунок 2. Модули бортового компьютера
Последовательность прокладки маршрута транспортного средства в условиях Крайнего Севера и Арктики с использованием бортового компьютера, разработанного в НГТУ, показана на рисунке 3.
При неудачной попытке преодоления препятствий прокладывается новый маршрут. Так же имеется возможность удаленного управления БТС при нештатных ситуациях. По фотоснимкам и 3D карте с БЛА, вычислительный комплекс (бортовой компьютер), благодаря распознаванию типа покрытия, на основе нейронных сетей, будет прокладывать безопасные маршруты до заданной точки, предварительно составляя карту проходимости. Выходными данными будут являться оптимальные возможные маршруты.

Рисунок 3. Последовательность прокладки маршрута транспортного средства в условиях Крайнего Севера и Арктики с использованием бортового компьютера, разработанного в НГТУ
Для повышения безопасности целесообразно использовать минимум два БТС для возможности буксирования при аварийных ситуациях. Уточненные карты местности и удачно проложенные маршруты возможно использовать в дальнейшем для других БТС.
На рисунке 4 схематично показано БТС с указанием систем управления и диагностики в условиях Арктики, разработанного в НГТУ им. Р.Е.Алексеева.
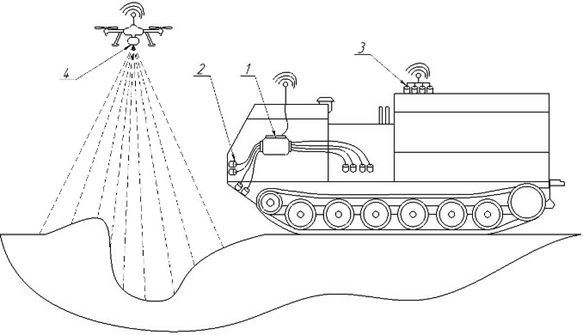
Рисунок 4. Типовая схема установки интеллектуальной системы управления на транспортном средстве, эксплуатирующийся
в условиях Арктики
На рисунке 4 обозначено: 1 –интеллектуальный бортовой компьютер с вычислительной системой, системой управления, диагностики, системой терморегуляции и беспроводной системы передачи данных 2 – датчики с проводной связью, 3 – датчики с беспроводной связью. 4 – БЛА оснащенный лидаром. Для повышения безопасности движения целесообразно использовать минимум два БТС для возможности буксирования при аварийных ситуациях. Уточненные карты местности и удачно проложенные маршруты, возможно, использовать в дальнейшем для других БТС.
Список литературы:
- Автомобили Tesla станут полностью автономными. URL: дата обращения: 03.10.2016)
- Jaguar Land Rover .Новости. URL: (дата обращения: 02.11.2016)
- Бортовой компьютер с искусственным интеллектом для беспилотных автомобилей. URL: (дата обращения: 02.11.2016)
- Кабалдин Ю.Г.,Лаптев И.Л., Шатагин Д.А. Диагностика выходных параметров процесса резания в режиме реального времени на основе фрактального и вейвлет анализов с использованием программно-аппаратных средств National Instruments и Nvidia CUDA // Вестник машиностроения. 2014. № 8. С. 36.[schema type=»book» name=»КОНЦЕПЦИЯ РАЗРАБОТКИ МАРШРУТА ДВИЖЕНИЯ БЕСПИЛОТНОГО ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ АРКТИКИ» description=»Рассмотрена концепция беспилотного транспортного средства с искусственным интел-лектом для условий Крайнего Севера и Арктики. Принципиальным отличием при раз-работке маршрута его движения является использование беспилотных летательных ап-паратов для уточнения предварительно составленного маршрута по снимкам из космо-са и передачи ими информации на бортовой компьютер БТС для распознавания видимых им объектов природы (склонов, лесных массивов и т.д.) и разработки реаль-ного пути безопасного движения бортовым компьютером БТС.» author=»Кабалдин Юрий Георгиевич, Киселёв Андрей Викторович, Шатагин Дмитрий Александрович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-01-16″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.10.16_31(1)» ebook=»yes» ]