
Введение:
На сегодняшний день онкологические заболевания по данным ВОЗ входят в десятку ведущих причин смертности населения [1]. Для снижения этого показателя по данному типу болезней необходимо проводить профилактику, диагностику и эффективное лечение.
Необходимым этапом диагностики онкологических заболеваний являются микроскопические исследования. При этом часто необходимо экспертное мнение специалиста, находящегося в другом медицинском учреждении, городе и даже стране. В связи с этим становится очевидна необходимость разработки АПК автоматического сканирования биомедицинских, в частности цитологических, препаратов на базе оптического микроскопа с возможностью дистанционного ручного сканирования, создания цифрового слайда и выдачи заключения. Такой комплекс во много раз ускорил бы работу лабораторной службы, и, тем самым, повысил эффективность морфологического исследования при злокачественных новообразованиях.
Создание данного АПК заключается в объединении микроскопа с моторизованным столиком, контроллера для его управления, блока автофокусировки, камеры, компьютера и необходимого программного обеспечения (ПО). При первичном анализе аналогов было установлено, что цена за комплект, состоящий из моторизованного столика и контроллера к нему, может превышать десять тысяч евро, что зачастую превышает возможности большинства лечебно-профилактических учреждений. Стоит отметить, что при этом штатный столик снимается и далее не используется. Поэтому была поставлена задача разработать блок моторизации с использованием штатного столика. Такое устройство могло бы существенно удешевить стоимость конечной системы и, как следствие, увеличить ее доступность для медицинских учреждений.
Разработка блока моторизации сводится к трем последовательным этапам. На первом этапе необходимо спроектировать электромеханический привод (ЭМП), приводящий столик в движение. Далее необходимо разработать контроллер, совмещенный с драйвером, для управления движением столика. На последнем этапе необходимо написать программное обеспечение для контроллера и персонального компьютера (ПК).
Новизна работы:
Разработанный блок является прямым аналогом моторизованных столиков для микроскопов. Данная разработка позволит существенно снизить стоимость комплекта моторизации, что поспособствует ее широкому внедрению в клиническую практику. Приведенные результаты дают основание, что при небольшой модернизации существующей конструкции можно превзойти аналоги по всем техническим характеристикам.
Мировая статистика
На сегодняшний день онкологические заболевания по данным ВОЗ входят в десятку ведущих причин смертности населения [1]. Согласно определению Американского общества рака (American Cancer Society) рак – группа заболеваний, характеризующаяся неконтролируемым ростом и распространением клеток [2]. Рак может быть вызван как внешними факторами (табак, химикаты, радиация, инфекционные заболевания), так и внутренними (мутации, изменение гормонального фона, изменения в иммунной системе).
Заболеваемость – количество новых случаев, выявленных в определенном периоде у определенной части населения [3]. Обычно выражается в абсолютном числе случаев заболевания в год или отнесенном к 100000 населения.
Наиболее распространенным по заболеваемости среди мужчин является рак простаты, а среди женщин рак груди. Раковые заболевания наиболее распространены в США и Австралии [3].
Смертность – число людей, умерших от рака за данный промежуток времени в определенной части населения [3]. Обычно выражается в абсолютном числе случаев заболевания в год или отнесенном к 100000 населения.
Статистика смертности в зависимости от локализации опухоли аналогична статистике заболеваемости. Наибольшая смертность наблюдается в странах Ближнего Востока, Африки и Южной Америки.
Распространенность определенного вида рака – число людей в определенной части населения, у которых диагностировали рак определенного типа в прошлом и которые живы до конца заданного года [3]. Обычно выражается числом или пропорцией к 100000 населения.
Статистика распространенности рака в зависимости от локализации опухоли абсолютно аналогична предыдущим. Статистики распространенности в зависимости от страны в рассматриваемой литературе нет.
Современные комплексы для автоматизированной микроскопии
Современные системы автоматизированной микроскопии можно разделить на два больших класса: сканеры и моторизованные микроскопы. Первые являются крайне дорогостоящими и в данной статье не нашли своего рассмотрения. А второй класс является наиболее популярным в связи со своей большей универсальностью и относительно низкой стоимостью. Основой моторизованных микроскопов является моторизованный столик, именно он и является прямым аналогом нашей разработки. В таблице 1 представлена сравнительная характеристика моторизованных предметных столиков известных фирм производителей [4-7].
Таблица 1
Сравнение характеристик современных моторизованных столиков
|
Наименование столика
Характеристика |
Thorlabs MLS203 Stage | Zaber ASR series | Marhauser Scan series | Marhauser Scan IM series |
Prior HLD117NN |
| 1 | 2 | 3 | 4 | 5 | 6 |
| Диапазон перемещения, мм×мм | 110×75 | 120×100 | от 75×30 до 300×300 | от 50×50 до 130×100 | 120×80 |
| Величина шага при стандартном разрешении, мкм | НД | 0,15625 | 0,01 | 0,01 | 0,05 |
| Максимальная скорость, мм/с | 250 | 85 | 60, 120, 240 | 60, 120 | 300 |
| Минимальная скорость, мм/с | НД | 0.000095 | НД | НД | 0.000001 |
| Двунаправленная повторяемость, мкм | 0,25 | менее 2 | менее 1 | менее 1 | 0,15 |
| Однонаправленная повторяемость, мкм | 0,25 | НД | НД | НД | НД |
| Ортогональность, арк/сек | НД | НД | менее 10 | менее 10 | 20 |
| Мертвый ход, мкм | НД | менее 4 | НД | НД | НД |
| Максимальная грузоподъемность, кг | 1,0 | НД | НД | НД | 6,0 |
| Дополнительное движение (минимум), мкм | 0,1 | НД | НД | НД | НД |
| Абсолютная точность по оси, мкм | менее 3 | 12 | 3 | 3 | НД |
| Относительная погрешность (максимальная), % | Х: 0,0027
Y:0,004 |
НД | НД | НД | НД |
| Отклонение от плоскости по оси Х | ±3 мкм на всем протяжении ±1 мкм на 10 мм | НД | НД | НД | 0,045 мкм на 1 мм |
| Отклонение от плоскости по оси Y | ±2 мкм на всем протяжении ±1 мкм на 10 мм | НД | НД | НД | 0,045 мкм на 1 мм |
| Точность в центре сканирования, мкм | 0,25 | НД | НД | НД | НД |
| Время установки на 1 мкм, с | 0,1 | НД | НД | НД | НД |
| Время установки на 0.1 мкм, с | 0,6 | НД | НД | НД | НД |
| Вес (включая кабели), кг | 3,2 | 3 | 4,4 для столика 100×100 | 4,4 для столика 100×100 | 7 |
| Концевые выключатели | Стандартно X и Y | НД | НД | НД | Стандартно X и Y |
| Тип опоры | Точные линейные подшипники | Скрещенный шариковый подшипник | НД | НД | НД |
| Тип мотора | Бесщеточный линейный двигатель постоянного тока | Шаговый двухфазный | Шаговый двухфазный | Шаговый двухфазный | Высокоточный линейный сервопривод постоянного тока |
| Размеры
Х, мм Y, мм Z, мм |
Х=280,5
Y=230,0 Z=31,0 |
НД | Х=274
Y=238 для столика 100×100 |
Х=274
Y=238 для столика 100×100 |
Х=366
Y=297 Z=49 |
| Цена предметного столика | 6799 $ | 4856 $ | 9486 € (для столика75×30) | НД | НД |
| Цена контроллера | 2959,28 $ | 920 $ | 6915,60 € | НД | НД |
В результате сравнения характеристик представленных на рынке моторизованных предметных столиков можно сделать обобщение:
-величина шага от 0,05 до 0,15625 мкм;
-максимальная скорость от 60 до 300 мм/с;
-двунаправленная повторяемость от 0,15 до 2 мкм;
-мертвый ход не более 4 мкм;
-наличие концевых выключателей;
-тип мотора – шаговый двигатель;
-цена за комплект моторизации (блок моторизации и контроллер) не более 5000$.
На основании рассмотренного выше обзора были сформулированы технические требования к блоку моторизации. После чего был произведен расчет и разработка конструкции блока в среде SolidWorks. Блок был создан с помощью FDM технологии на 3D принтере. На сегодняшний лень конструкция реализована на прямозубых цилиндрических колесах (рис. 1) и без использования энкодеров ввиду экономической нецелесообразности их применения. В дальнейшем планируется создать аналогичную конструкцию с использованием червячной передачи.
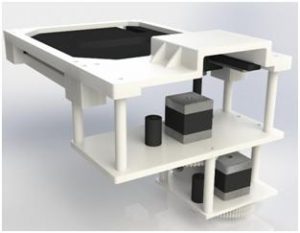
Рисунок 1 – Общий вид конструкции блока моторизации
Исследования вероятностных характеристик исполнения шага в различных микрошаговых режимах
Для данного исследования проводились следующие действия:
- На столик микроскопа устанавливалось стекло, имеющее шкалу с делением 10 мкм.
- Проводилась последовательная регистрация полей зрения после очередного шага для различных микрошаговых режимов и драйверов.
- Для определения показателей двухсторонней повторяемости выполнялся цикл, в ходе которого происходило движение на полоборота рукоятки микроскопа и обратно с последующей регистрацией поля зрения.
- Далее все изображения проходили обработку с целью получения статистических характеристик разброса следующих величин:
- Перемещение вдоль оси х;
- Перемещение вдоль оси у;
- Повторяемость по х
- Повторяемость по у
Полученные результаты по перемещениям были сведены в таблицу 2, а по повторяемости в таблицу 3. Изначально данные были получены в пикселах, потом были переведены в мкм с учетом усредненного расстояния между делениями шкалы в пикселах. Среднее расстояние между делениями составило 58,2 пиксела.
Таблица 2.
Статистические показатели при перемещении столика в различных микрошаговых режимах и с использованием различных драйверов
|
Название драйвера |
Микрошаговый режим | Выборочное среднее m, мкм | СКО S, мкм | m/S, ед. |
Среднее m/S, ед. |
| Pololu A4988 | Целый шаг, вправо | 8,52 | 1,68 | 5,08 | 5,16 |
| Целый шаг, влево | 8,66 | 1,65 | 5,23 | ||
| 1/2 шага, вправо | 4,39 | 0.93 | 4,71 | 4,07 | |
| 1/2 шага,
влево |
4,50 | 1,32 | 3,42 | ||
| 1/4 шага, вправо | 2,07 | 1,15 | 1,80 | 1,62 | |
| 1/4 шага,
влево |
0,84 | 0,58 | 1,44 | ||
| 1/8 шага, вправо | 0,93 | 0,66 | 1,41 | 1,54 | |
| 1/8 шага,
влево |
0,52 | 0,32 | 1,66 | ||
| 1/16 шага, вправо | 0,44 | 0,34 | 1,33 | 1,41 | |
| 1/16 шага, влево | 0,26 | 0,17 | 1,49 | ||
| Texas Instruments DRV8825 | Целый шаг, вправо | 8,80 | 1,35 | 6,51 | 6,95 |
| Целый шаг, влево | 8,94 | 1,21 | 7,39 | ||
| 1/2 шага, вправо | 4,11 | 1,80 | 2,81 | 2,65 | |
| 1/2 шага,
влево |
4,29 | 1,73 | 2,49 | ||
| 1/4 шага, вправо | 1,95 | 1,84 | 1,06 | 1,01 | |
| 1/4 шага,
влево |
2,45 | 2,59 | 0,95 | ||
| 1/8 шага, вправо | 0,92 | 1,49 | 0,62 | 0,59 | |
| 1/8 шага,
влево |
0,90 | 1,59 | 0,56 | ||
| 1/16 шага, вправо | 0,41 | 1,13 | 0,36 | 0,37 | |
| 1/16 шага, влево | 0,48 | 1,26 | 0,38 | ||
| 1/32 шага, вправо | 0,20 | 0,78 | 0,26 | 0,24 | |
| 1/32 шага, влево | 0,22 | 1,00 | 0,22 | ||
| Trinamic TMC2100 | 1/16 шага, вправо | 0,26 | 0,09 | 2,91 | 2,79 |
| 1/16 шага, влево | 0,23 | 0,09 | 2,67 |
Таблица 3.
Статистические показатели для односторонней повторяемости перемещения столика в различных микрошаговых режимах и с использованием различных драйверов
| Название драйвера | Микрошаговый режим | Ось | Выборочное среднее m, мкм | СКО S, мкм | m/S, ед. |
Суммарное |m/S|, ед. |
| Pololu A4988 | Целый шаг* | x | — | — | — | — |
| y | — | — | — | |||
| 1/2 шага | x | 0,027 | 0,027 | 0,99 | — | |
| y | — | — | — | |||
| 1/4 шага | x | 0,172 | 0,691 | 0,249 | — | |
| y | — | — | — | |||
| 1/8 шага | x | 0,008 | 0,040 | 0,194 | — | |
| y | — | — | — | |||
| 1/16 шага | x | 0,007 | 0,104 | 0,066 | — | |
| y | — | — | — | |||
| Texas Instruments DRV8825 | Целый шаг | x | 0,007 | 0,028 | 0,263 | 1,756 |
| y | 0,143 | 0,096 | 1,493 | |||
| 1/2 шага | x | 0,017 | 0,042 | 0,406 | 1,584 | |
| y | -2,216 | 1,883 | -1,177 | |||
| 1/4 шага | x | 0,027 | 0,121 | 0,225 | 1,063 | |
| y | 0,113 | 0,135 | 0,838 | |||
| 1/8 шага | x | 0,220 | 0,890 | 0,247 | 0,371 | |
| y | 0,079 | 0,636 | 0,124 | |||
| 1/16 шага | x | -0,072 | 0,208 | -0,348 | 0,428 | |
| y | -0,017 | 0,216 | -0,080 | |||
| 1/32 шага | x | -0,007 | 0,050 | -0,146 | 0,233 | |
| y | 0,007 | 0,197 | 0,087 | |||
| Trinamic TMC2100 | 1/16 шага | x | -0,013 | 0,143 | -0,089 | 0,907 |
| y | -0,062 | 0,076 | -0,818 |
Примечание:
Для драйвера A4988 не удалось получить данные для повторяемости при целошаговом режиме в связи с тем, что частота тактирования от микроконтроллера была слишком высокой, а для ее управления в текущей версии программы нет возможности. В остальных же режимах снять повторяемость по оси у для этого драйвера также не удалось, так как шкала не наблюдалась в поле зрения после выполнения цикла. Это говорит о пропуске большого числа шагов драйвером.
Заключение
В данной статье представлены результаты исследования качества выполнения перемещения в блоке моторизации ручного столика микроскопа собственной разработки. По полученным данным (таблица 1, таблица 2) можно сделать следующие выводы:
- Для перемещения столика наилучшим (максимальное среднее m/S) является целошаговый режим. Наибольшим значением обладает драйвер DRV8825.
- Так как из-за особенностей драйвера TMC2100 был исследован только режим 1/16, то однозначно судить о том, какой драйвер обеспечивает наибольшую стабильность при исполнении шага, нельзя. Требуется доработка платы драйвера TMC2100 для возможности управлением шаговым режимом для того чтобы окончательно можно было бы сделать вывод о том, какой драйвер лучше. Однако стоит отметить, что при сравнении режима 1/16 шага драйвер TMC2100 оказывается лучшим среди остальных.
- Повторяемость также оказывается лучшей у DRV8825 и TMC При сравнении режима 1/16 TMC2100 показывает наилучшие результаты в сравнении с остальными драйверами. В сравнении с существующими на рынке аналогами однонаправленные повторяемости как минимум на порядок меньше.
Список литературы
- ВОЗ. 10 ведущих причин смертности в мире [Электронный ресурс]. ). Проверено 30.03.2017.
- American Cancer Society. Global cancer Facts & Figures [Электронный ресурс]. ). Проверено 30.03.2017.
- Cancer Research UK. World cancer factsheet [Электронный ресурс]. ). Проверено 30.03.2017.
- Märzhäuser Wetzlar. Motorized microscope stages by Märzhäuser Wetzlar with the series BASIC, ECO and SCAN [Электронный ресурс]. (https://www.marzhauser.com/en/products/microscope-stages/motorized-microscope-stages.html). Проверено 30.03.2017.
- Prior Scientific. Prior Scientific [Электронный ресурс]. ). Проверено 30.03.2017.
- Motorized Stages – Thorlabs [Электронный ресурс]. (https://www.thorlabs.de/navigation.cfm?guide_id=2060). Проверено 30.03.2017.
- Linear Slides , Stages and Actuators – Zaber Technologies [Электронный ресурс].(https://www.zaber.com/). Проверено 30.03.2017.[schema type=»book» name=»ИССЛЕДОВАНИЕ КАЧЕСТВА ИСПОЛЕНЕНИЯ ПЕРЕМЕЩЕНИЯ В БЛОКЕ МОТОРИЗАЦИИ ПРЕДМЕТНОГО СТОЛИКА МИКРОСКОПА СОБСТВЕННОЙ РАЗРАБОТКИ» description=»На сегодняшний день диагностика множества заболеваний включает в себя микроскопические ис-следования. Существующие на автоматизированные микроскопические системы на базе оптических микроскопов являются крайне дорогостоящими и не используют штатный столик. Отсюда становится очевидна необходимость разработки аппаратно-программного комплекса автоматизированной микро-скопии на основе ручного оптического микроскопа с использованием штатного столика. Это позволит максимально снизить цену на систему в целом, что поспособствует ее широкому внедрению в клиниче-скую практику. В данной статье рассмотрены результаты экспериментального исследования качества исполнения перемещения в блоке моторизации собственной разработки для ручного столика микроскопа фирмы Meiji. На сегодняшний день в комплексе реализована вся аппаратная часть и программная часть, позволяющая в ручном или автоматическом режиме проводить регистрацию полей зрения.» author=»Махов Денис Сергеевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-04-12″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.03.2017_03(36)_часть 1″ ebook=»yes» ]