
Постоянно растущее народное хозяйство в условиях современной рыночной экономики требует совершенствования всех видов транспорта, и особенно большие требования предъявляются к грузовому автотранспорту, где в последние годы отмечается рост грузооборота приблизительно на 30-40%. При этом, особенное значение придается совершенствованию структуры грузового автомобильного парка с автомобилями, оснащенными дизельными двигателями, особенно посредством развития высокоэффективных, карьерных, высокогрузоподъемных специальных автомобилей высокой проходимости.
В связи с тем, что автомобили представляют собой сложную, нелинейную динамическую систему с множеством степеней свободы, функционирование которых происходит в условиях взаимодействия с окружающей средой, была разработана линейная математическая модель динамики движения автопоезда, в которой предусмотрены характеристики дизельного двигателя, тип ведущих мостов, зависимость междукрутильными колебаниями трансмиссии и вертикальными и продольно-угловыми колебаниями массы автомобиля, а также упругими элементами подвески и шинами, тип и характеристики шин, входящие возмущенияот дорожных неровностей, при этом модель позволяет учитывать воздействие прицепа на динамику автомобиля-тягача.
Разработка линейной математической модели на первом этапе позволила выявить структуру, зависимости и основные закономерности, которые присутствуют в динамической модели автопоезда. Изучение линейных систем, построенных искусственным способомполезно для многих практических расчетов, однако в реальных объектах, в том числе и в автомобилях, наблюдается наличие таких элементов, которые характеризуются нелинейной зависимостью деформации, вызванной нагрузкой. Это обстоятельство вызывает в поведении таких динамических систем количественные, и, что особенно важно, качественные изменения влияния внешних факторов. Поэтому при проектировании автомобилей и автопоездов, требования к повышению точности расчетов могут быть соблюдены только при условии, если будут разработаны и изучены такие математические модели, в которых будут предусмотрены самые существенные нелинейности. С этой целью в статье рассмотрены особенности двигателя внутреннего сгорания, трансмиссии и подрессоренных систем, взаимозавсимые колебания упругой подвески агрегатов на раме, а также те нелинейности, которые вызывают возмущающее воздействие от дороги.
Автомобиль, также как и автопоезд, представляя собой многомассную колебательную систему, характеризуется собственными частотой и формами колебаний, знание которых необходимо для определения резонансной зоны. На основе анализа существующих данных устанавливаем, что исследуемая система является многочастотной и обладает широким диапазоном частот, начиная с нулевого и заканчивая высокочастотными колебаниями деталей коробки передач. Если учесть, что мы рассматриваем динамическую нагруженность трансмиссии и систему, подрессоренную от дорожных неровностей, ограничимся частотой до 25 гц и уделим внимание низкочастотным колебаниям.
Необходимо отметить, что на величину распределения крутящего момента между ведущими мостами полноприводного автомобиля существенное влияние оказывает типы передних мостов привода, а также существующие в трансмисси зазоры.
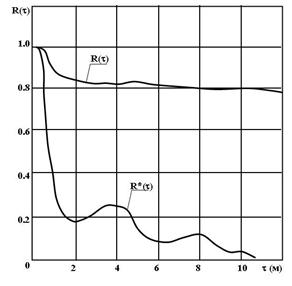
Рисунок 1. График корреляционной функции профилированной мостовой
с трендом R(τ) и без тренда R*(τ)
Математическая модель процесса контроля и расчеты, отдельные результаты которых представлены на Рис. 1, позволяют выявить качественную картину нагруженности трансмиссии автомобиля и динамики подрессоренной системы, с зависимостью ведущих мостов от типов привода, при движении с первой передачей со скоростью 5 км/ч по синусоидным неровностям длиной ℓH=2,5 м и высотой hmax=0,4 м легко заметить, что при движении автомобиля с приводом блокировочного типа, имеет место неравномерное распределение крутящих моментов между полуосями ведущих мостов, пи этом нагруженность полуосей переднего моста на 10% меньше по сравнению с приводом дифференциального типа. Это объясняется разностью между радиусами качения колес вследствие распределения веса автомобиля по мостам, а также продольных угловых колебаний подрессоренной массы по упругим элементам подвески и шины. При этом, большое значение придается скорости движения автомобиля, поскольку частота возмущающих колебаний, вызванных дорожными неровностями определяется по формуле:
![]()
Где:Vа — скорость движениям.сек-1;
ℓH— длина волны синусоиды.
На VII передаче при движении со скоростью =10,4 м/сек-1,частота возмущающего воздействия от дороги достигает 2,8 гц и становится равной первой частоте собственных колебаний трансмиссии автомобиля, т.е. начинается резонанс колебаний, что приводит к заметному увеличению крутящих моментов на полуосях. Что касается воздействия существующих в трансмиссиях зазоров на динамическую нагруженность, нужно отметить, что их предельные величины зависят от изготовления сопряженных деталей, максимального и минимального допусков, а также от пробега автомобиля и условий эксплуатации. Анализ процесса нагружения полуосей крутящим моментом показал, что существование округлых зазоров приводит к перегрузке полуосей при движении как с дифференцмальным, так и с блокирующим приводом.
Реальный процесс движения автомобиля представляет собой случайные колебания, вызванные случайным характером воздействия дорожных неровностей. Расчет динамической нагруженности системы «двигатель-трансмиссия-подвеска-движитель», при ее движении в установленном режиме по неровным дорогам, производится методом имитационного моделирования, поскольку исследуемая динамическая система обладает четко выраженной нелинейностью, а нерегулярный дорожный микропрофиль представлен координатами тех точек, которые обладают постоянным шагом вдоль дороги и которые воспринимаются как результат нивелирования реального дорожного профиля.
Если допустить, что функция (x) микропрофиля какого-либо участка дороги определена и она удовлетворяет условию Дирихле в интервале (ℓ,ℓ), то эта функция будет разложена в неполный ряд Фурье по синусам и косинусам кратных дуг, если допусить, что функция (x) является четной, то bn=0.
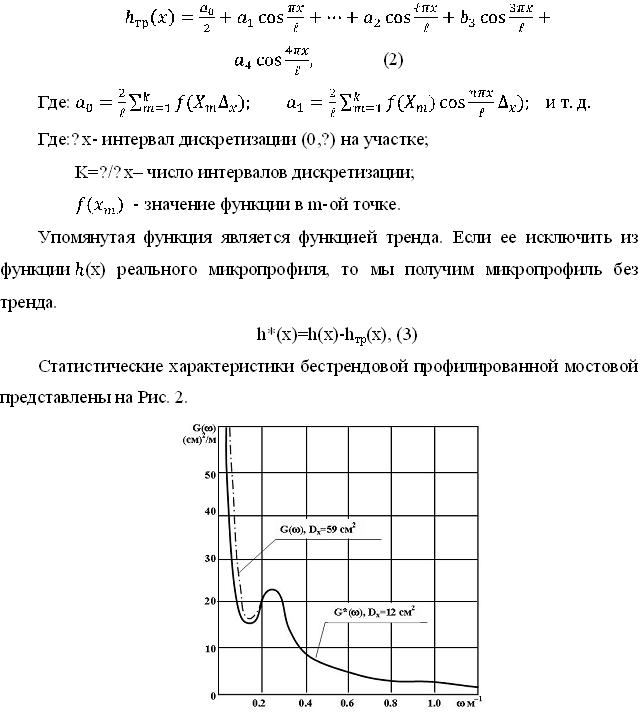
Рисунок 2. Спектральная плотность возмущающего влияния микропрофилия
профилированной мостовой с трендом G(ω) и без тренда G*(ω)
С цельюрасчетадинамическойнагруженности трансмиссии и подрессоренной системы автомобиля были отобраны наиболее нагруженные детали этой системы – полуоси переднего и заднего ведущих мостов, а также подвеска заднего моста, функцию упругих элементов которого выполняет многолистовая рессора. На Рис. 3 представлены спектральные плотности крутящего момента задней полуоси и динамического хода задней подвески при движении исследуемого автомобиля с приводом ведущих мостов диффернциального типа по специально профилированной дороге со 2-ой передачей и со скоростью 5 км/ч. Как видно из чертежа, максимум спектральной плотности крутящего момента на полуоси находится в области частот ƒ=0,6-0,8 гц, что обусловлено высоким значением спектральной плотности возмущения от дорожного покрытия, а также самими параметрами трансмиссии. Незначительный рост спектральной плотности Gm(ƒ)в области частот ƒ=1,1-1.2 гц обусловлен интенсивным воздействием на трансмиссию вертикальных колебаний подрессоренных масс именно в этой частотной зоне. Интенсивный разгон подрессоренной массы вызывает изменение сил сопротивления движению под колесами автомобиля, и, исходя из этого, изменение момента нагрузки трансмиссии.
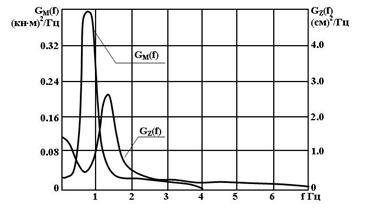
Рисунок 3. Спектральные плотности динамического движенияGM(f) крутящего момента и Задней подвескиGz(f), при движении на профилированном мостовом
Экспериментальными исследованиями установлено, что даже при движении в установленном режиме по реальной дороге, отдельные звенья автопоезда обладают взаимо-относительными передвижениями, которые обладают ярко выраженными колебательными свойствами.
Исследование динамической нагруженности системы «двигатель-трансмиссия-подвеска-движитель», при ее движении в составе автопоезда вместе с прицепом полностью в нагруженном состоянии, позволяет нам сравнить динамическую нагруженность автомобиля отдельно и при его нахождении в составе автопоезда. На Рис. 4 представлены графики спектральной плотности крутящих моментов Gm(ƒ)задней полуоси и динамического хода GZ(ƒ)задней подвески при движении автопоезда со 2-ой передачей со скоростью 5 км/ч. Если мы сравним упомянутый график с графиком, представленным на Рис 3, то увидим, что характер изменения спектральных плотностей одинаков. Имеет место лишь рост спектральной плотности крутящего момента полуоси в случае с автопоездом.
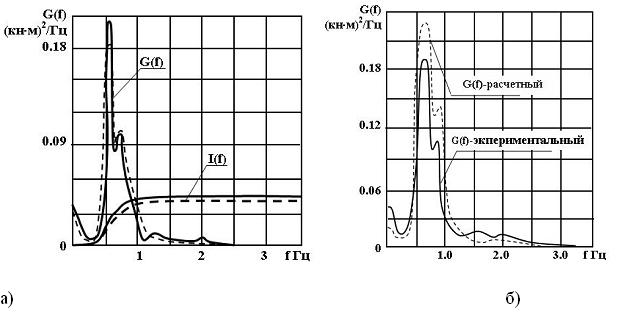
Рисунок 4. Интегральные спектральные функции крутящих моментов
на полуось и спектральные плотности G(f) на профилированный
автомобиль типа 4x4 при движении а)блокированным и б)дифференциальным двигателем
Сплошная линия-передний полуось; Штрих линия-задней полуось.
Нужно отметить, что при движении в приведенном режиме, установка амортизатора в задней подвеске не дает желаемого уменьшения уровня спектральной плотности крутящего момента полуоси. Это обусловлено не столь высокими относительными частотами вертикальных колебаний подрессоренных и неподрессоренных масс.
Экспериментальное исследование трансмиссии и подвески полноприводного автомобиля и автопоезда было проведено в пригородных районах города Кутаиси (Бакисубани, Месхети, Броцеула, Гегути, Баноджа и горные дороги Сатаплиа).
- Профилированная мостовая (длина участка,ℓ= 500 м);
- Прямая ровная мостовая (ℓ=1000 м);
- Асфальт (ℓ=1000 м);
- Грунт (ℓ=1000 м).
Автомобиль был нагружен металлическим балластом, который был сложен на металлическом кузове. Масса балласта и его расположение обеспечили нормальную загрузку.
В соотвествии с задачами экспериментального исследования динамической нагруженности трансмиссии и подрессоренной системы автомобиля, была разработана соответствующая методика проведения испытаний.
Относительное передвижение правых боковых колес измеряли с помощью телескопического индукционного датчика W-200, который позволил нам измерить перемещение в пределах от 0 до 400 мм, с погрешностью 0,5%.
Для измерения частоты вращения кулачкового вала использован тахогенератор переменного тока МЭ-307, который входит в систему электрооборудования автомобиля. Частоту вращения заднего левого колеса измеряли с помощью тахогенератора постоянного тока и магнитной головки М59.03.019.
В процессе проведения испытания, осуществлялся систематический контроль еще одного весьма важного параметра, который характеризует уровень динамической нагруженности исследуемой системы – расход топлива.
Принимая во внимание большое количество параметров и особенность их изменения, в качестве усиливающего и регистрирующего аппарата был выбран четырехканальный тензоусилитель TA-5 и 20-канальный магнитоэлектрический осциллограф K20-210, которые позволили нам осуществить запись на ленте шириной 190 мм. Для питания аппаратуры, на кузове автомобиля был установлен блок питания, в который входят три аккумуляторных батареи.
Анализ и сравнение записей, полученных экспериментальным путем позволяют получить качественную и количественную картину особенностей динамической нагруженности узлов и агрегатов автомобиля, определить тип привода передних мостов, номер включенной передачи, скорость движения и влияние типа дороги на уровень динамической нагруженности узлов и агрегатов автомобиля.
Результаты, полученные во время экспериментального исследования подверглись статистической обработке по специальной программе и были получены следующие статистические характеристики процессов:
- Математическое ожидание Mx;
- Среднее квадратичное отклонение σx;
- Дисперсия Gx(ƒ);
- Функция спектральной плотности γxy(ƒ);
- Функция когерентности двух случайных процессов
На основе результатов, полученных экспериментальным путем можем сделать вывод, чтотеоретические положения и числовые параметры, положенные в математическое ожидание являются достоверными. Несоответствие между результатами, определенными с помощью теоретических и экспериментальх методов наиболее важных статистических характеристик исследуемых случайных процессов нагруженности трансмиссии и подрессороенной системы, составляет:
- Математическое ожидание — не выше 10%;
- Дисперсия — не выше 20%;
- Спектральная плотность — 20-25%;
- Частота резонансных зон – не более 5%.
С помощью математической модели и экспериментальных исследований процессов контроля, было установлено, что: динамическая нагруженность трансмиссии автомобиля в составе его автопоезда, в режиме работы с прицепом массой в 9 тонн, по всем статистическим показателям увеличивается на 35-40%; установка стандартного амортизатора в задней подвеске может привести к снижению динамической нагруженности полуосей заднего моста на высоких передачах по улучшенной дороге в среднем на 40-45%. Также установлен характер влияния основных конструкционных параметров на частоту собственных колебаний. Проведенные расчеты вынужденных колебаний позволили нам оценить действие подрессоренной системы автомобиля во время наиболее нежелательных гармонических возмущающих на него воздействий.
Список литературы:
- Катамадзе К.К., Русадзе Т.П., Гелашвили И.С. Метод составления математической модели динамической системы «двигатель-трансмиссия-колесо-подвеска»: Сборник трудов первой международной научно-технической конференции «INTERTRANS-2000», т. 3: Кутаиси, 2000. -144-150 с.
- Русадзе Т.П., ГвинефадзеН.Ш., Тевзадзе М.Ш. Математическое моделирование движения полноприводных автомобилей:ТрудыIII Международной научно-технической конференции «MOTAUTO,98»: Болгария, София, 1998. –135-137 с.
- 3. Русадзе Т.П., Платонов В.Ф., Семенов В.М., Гогитидзе А.С., Русадзе П.Т.Оптимизация параметров автомобиля:Издательство «Алиони»: Батуми, 2002.-319 с.[schema type=»book» name=»Диагностирование нагруженности трансмиссии грузового автопоезда при движении на дорогах разного типа» author=»Тевзадзе Мавра Шамилиевна, Чхартишвили Заза Гиоргиевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-05-08″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 28.02.2015_02(11)» ebook=»yes» ]