
Одним из важных подготовительных этапов пуска ядерных реакторов на быстрых нейтронах серии БН (теплоноситель – жидкий натрий) является разогрев корпуса реактора, для чего предназначена система газового разогрева, состоящая из совокупности нагнетателей, задвижек и временных газопроводов, а теплоносителем в системе выступает инертный газ аргон. Основная задача данной системы – разогреть корпус реактора до температуры, необходимой для начала ядерной реакции (примерно 350ºС).
Для обеспечения целевого значения температуры, необходимо контролировать динамику разогрева, а также регулировать систему в случае выхода из строя одного или нескольких нагнетателей. Также следует заметить, что процесс газового разогрева является непрерывным и достаточно длительным (например, на реакторе БН-800 Белоярской АЭС этот процесс занял около двух месяцев – затраченное время в данном случае зависит от объема корпуса реактора). [1, c.13]
Основными методами, позволяющими добиться необходимой динамики разогрева, являются введение или вывод из системы одного или нескольких нагнетателей, а также изменение скорости прохождения газом улитки нагнетателя. В некоторых видах нагнетателей возможно также увеличивать трение в улитке посредством регулируемых направляющих лопаток.
Устройство нагнетателей, которые используются в системе газового разогрева, представлено на рисунке 1.
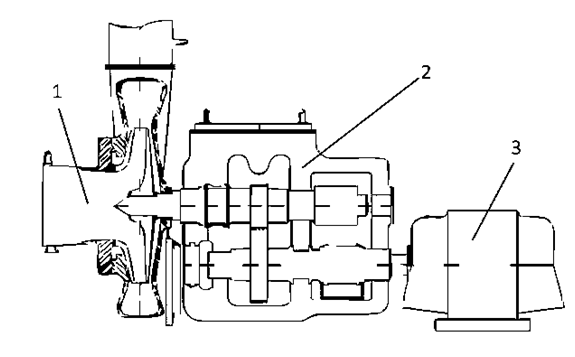
Рисунок 1. Устройство нагнетателя: 1 – улитка, 2 – редуктор, 3 – асинхронный двигатель
На основе опытных данных было установлено, что оптимальным количеством нагнетателей в системе является пять (при этом от одного до двух нагнетателей должно находиться в резерве), тогда как в системе газового разогрева реактора БН-800 использовалось только три нагнетателя. [1, c. 14] Нагнетатели соединяются по принципу общей магистрали, что позволяет обеспечить не только высокую производительность системы, но и надежность.
Система управления газовым разогревом реактора представляет собой программно-аппаратный комплекс, предназначенный для обеспечения требуемых характеристик системы разогрева, а также для мониторинга.
Для ввода или вывода из работы нагнетателя, а также для регулирования скорости прохождения газом улитки, целесообразно использовать частотное управление асинхронным двигателем (см. рисунок 1,3).
К способам частотного управления асинхронными двигателями можно отнести модульное (скалярное) и векторное управление.
Наибольшее распространение получило скалярное управление, которое применяется в приводах компрессоров, вентиляторов, насосов, где требуется обеспечивать определенный уровень или скорости вращения вала электродвигателя, или некоего технологического параметра (например, давления в системе). Несмотря на простоту такого способа управления, он обладает большим количеством недостатков: во-первых, для управления скоростью вращения вала необходима установка датчика скорости; во-вторых, даже при наличии датчиков скорости и момента, регулировать оба параметра одновременно в подобных системах невозможно. Кроме того, данный способ управления плохо применим к асинхронным двигателям с короткозамкнутым ротором.
Эти недостатки были устранены в способе трансвекторного управления, предложенном компанией Siemensв 1971 году. Векторное управление предполагает наличие в звене управления математической модели электродвигателя, при этом модель может быть как построена на основе типовых данных, так и уточняться в процессе работы системы. Несмотря на большую точность второй методологии, чаще применяется способ построения систем управления на основе типовой математической модели.
При расчете систем управления асинхронным частотно-регулируемым приводом, как правило, используют параметры Т-образной схемы замещения асинхронного двигателя (см. рис. 2).

Рисунок 2. Т-образная схема замещения асинхронного двигателя
Параметры схем замещения не всегда известны разработчикам систем управления асинхронными частотно-регулируемыми приводами, поэтому расчет происходит по каталожным данным. [2, c. 99]Причем, несмотря на допустимую точность существующихметодик (например, методика, приведенная в [2], дает погрешность в 10-15%), системы управления, построенные на основе типовых моделей, обладают посредственными характеристиками эффективности.Для уточнения параметров модели в процессе работы системы управления, применяются системы с обратной связью.
В последнее время, благодаря развитию вычислительной техники, популярным стал способ прямого управления моментом (DTC–directtorquecontrol).Фактически, данный способ можно также отнести к векторному управления. Основная идея прямого управления моментом заключается в том, что на каждом шаге расчета определяется оптимальное состояние инвертора напряжения по значению момента и потока статора. [3, c.64] Несмотря на то, что прямое управление моментом было реализовано компанией ABB еще в 90-е годы, данное направление в частотном управлении двигателями принято по сей день считать новым. В качестве преимуществ DTCвыделяют низкую чувствительность к изменению параметров асинхронного двигателя и высокое быстродействие, а основным недостатком данного способа управления можно назвать большие флуктуации момента.
В основе прямого управления моментом лежит уравнение электромагнитного момента асинхронного двигателя:

Основным параметром, который используется для расчета системы, выступает потокосцепление статора ψ1. Неточность определения активного сопротивления статора и его изменение из-за нагревания асинхронного двигателяприводят к накоплению ошибки. При ошибке определения сопротивления статора, превышающей 10%, можно говорить о неработоспособности системы DTC, поэтому в таких системах применяются идентификация параметров двигателя и механизмы адаптации в процессе работы. [3, c.68]Поэтому прямое управление моментом часто применяется в совокупности с регуляторами, построенными на принципах нечеткой логики.
Для синтеза систем DTCс нечеткой логикой могут применяться различные методики, например, на основе алгоритма Такаги-Сугено. Функциональная схема системы прямого управления моментом с нечеткими регуляторами потокосцепления и момента представлена на рисунке 3.
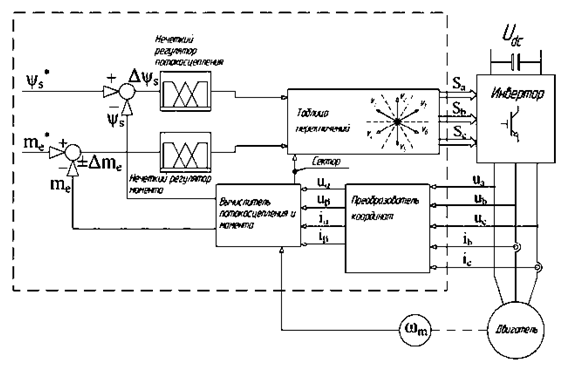
Рисунок 3. Функциональная схема DTC с нечеткой логикой
Исходя из задач управления, способ прямого управления моментом с использованием нечетких регуляторов является наиболее предпочтительным, хотя также достаточно эффективно может быть трансвекторное управление на основе модели с обратной связью.
Для практической реализации нечеткого регулятора можно использовать программное обеспечение SiemensFuzzyControl++, позволяющее создавать системы нечеткого управления на основе промышленных программируемых логических контроллеров Simatic S7-300/400. К сожалению, с января 2014 года поддержка данного продукта прекратилась, поэтому нет возможности использовать его для более новых ПЛК. Однако, в соответствии с выбранным в [1] оборудовании для системы управления газовым разогревом используются именно контроллеры SimaticS7-300.
Список литературы:
- Волкова Е.А., Дружинин А.В. Выбор оборудования для системы управления газовым разогревом ядерного реактора БН-типа. / XVIII-я Международная научная конференция «Актуальные вопросы современной техники и технологии». Липецк, 2015 г. – с.12-16
- Дружинин А. В., Дружинина Е. А., Полузадов В. Н. Определение параметров Т-образной схемы замещения асинхронного двигателя при расчете систем управления частотно-регулируемым электроприводом / Екатеринбург: УГГУ, Изв. вузов. Горный журнал. – 2013. – № 3, с. 98-105.
- Усольцев А.А. Частотное управление асинхронными двигателями / Учебное пособие. — СПб: СПбГУ ИТМО, 2006. – 95 с.[schema type=»book» name=»ВЫБОР СПОСОБА ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ НАГНЕТАТЕЛЯ В СИСТЕМЕ УПРАВЛЕНИЯ ГАЗОВЫМ РАЗОГЕВОМ ЯДЕРНЫХ РЕАКТОРОВ БН-ТИПА» description=»В статье рассматривается вопрос применения частотного управления асинхронным двигателем нагнетателя в системе управления газовым разогревом ядерных реакторов на быстрых нейтронах. Сравниваются различные способы частотного управления асинхронными двигателями. Наиболее перспективным признан метод прямого управления моментом с нечеткой логикой.» author=»Волкова Евгения Алексеевна, Дружинин Алексей Владимирович, Полузадов Владимир Николаевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-30″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.04.2015_04(13)» ebook=»yes» ]