
В настоящее время использование волоконно-оптических датчиков (ВОД), в различных сферах деятельности человека чрезвычайно высоки. Рассмотрим описание работы блока синхронизации. Генератор тактовых импульсов (ГТИ) посылает прямоугольные импульсы с частотой со строго симметричными параметрами в счетчик с дешифратором, который в свою очередь начинает посылать пачку из 20 позиционных сигналов в перестраиваемый зондирующий лазерный источник, так же дублирует данные сигналы и посылает их в TDMA DEMUX. После посылки двадцатого по счету позиционного сигнала, счетчик посылает сигнал сброса в OTDM мультиплексор. Все выходные сигналы со счетчика дублируются в виде двоичного кода в микроконтроллер.
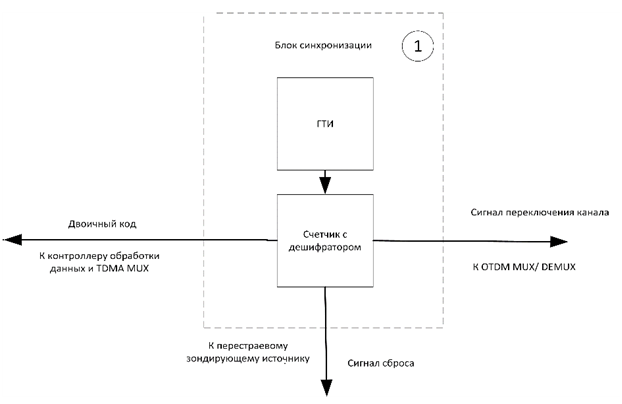
Рис. 1 — Блок синхронизации измерительной системы ВОД
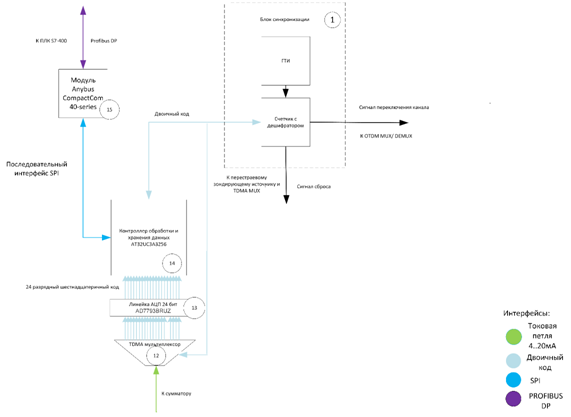
Рис. 2 — Структурная схема блока сбора данных
Электрические сигналы поступают на сумматор. В результате чего амплитуда эталонного сигнала подавляется частично амплитудой измерительного сигнала, смотрите рисунок3. При отсутствии воздействия, амплитуда сигнала на выходе будет отсутствовать. В данном случае отраженный сигнал измерительного не сместился по частоте, соответственно она полностью подавляется амплитудой эталонного сигнала. Коэффициент подавления прямопропорционально зависит от воздействия на измерительный датчик.
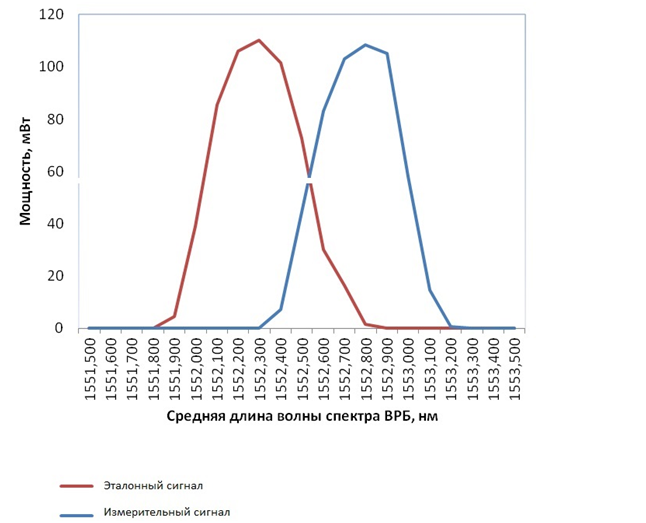
Рис. 3 — Степень подавления амплитуд двух сигналов
Электрический сигнал с определенной амплитудой и частотой поступает на TDMA демультиплексор. Мультиплексирование происходит так же с временным распределением. Данный мультиплексор работает в симплексном режиме.Электрический сигнал перед вводом в микроконтроллер, оцифровывается. Для измерения воздействий с относительно высокой точностью 1-2%, применяются 24 бита. Каждый из 20 каналов содержит аналого-цифровой преобразователь (АЦП). Данное распределение элементов является экономически более выгодным подходом. Так же поддерживается гальваническая развязка между каналами. Оцифровка аналогово сигнала изображена на рисунке 4.
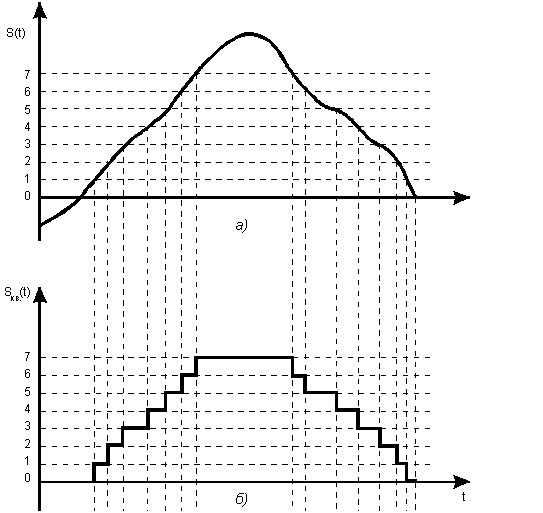
Рис. 4 — Оцифровка (б) аналогового сигнала (а)
На выходе АЦП передается последовательность 24 битных отсчетов на каждый из 20 каналов, которые поступают на микроконтроллер.Микроконтроллер является важнейшей частью в данном интерфейсе, он выполняет операцию присвоения уникального номера каждому из отсчетов.Так как система датчиков представляет собой двумерную матрицу, необходимо провести алгоритм распознавания. Для этого в МК присваивается уникальный номер каждого датчика. Чтобы распознать с какого датчика пришел сигнал, в блок синхронизации отправляет запрос двух координат, смотрите рисунок 5:
Y ) положение лазера, т.е. на каком участке волны излучает лазер в данный момент.
X ) Номер принимающей линии OTDM мультиплексора.
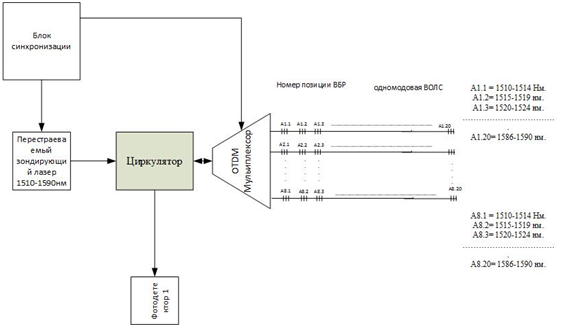
Рис. 5 — Схема матричной позиции датчиков ВРБ
Зондирующегоинтерфейса ВОД
Опрос датчиков по Х координате производится путем перестроения лазера по длине волны. Опрос датчиков по Y координате производится путем переключения канала OTDM мультиплексора. В микроконтроллер (МК) поступает два массива, один из которых описывает в цифровом виде амплитуду сигнала с датчиков ВРБ, а другой содержит информацию о шаге зондирования (какой интервал длины волны зондирует лазер в данный момент) и соответственно о шаге переключения канала OTDM мультиплексора. Для точности получения информации, шаг переключения канала МК рассчитывает при считывании последовательных сигналов с датчиков ВРБ. При получении двадцатого отсчета, МК регистрирует переключение канала OTDM MUX и соответственно получает сигнал переключения с блока синхронизации. Далее в МК происходит присвоение каждому отсчету (оцифрованному сигналу с датчика) уникального двоичного кода, содержащий информацию о шаге зондирования и в каком канале OTDM MUX происходит процесс зондирования. Полученные закодированные отсчеты отправляются по сдвиговому регистру в следующий блок.
Обработанные данные через последовательный SPI интерфейс поступают на комуникационный модуль Anibus CC. В данном интерфейсе производится организация передачи данных по протоколу Profibus DP.
Данные с преобразователя интерфейса поступают на ПЛК S7-400, для последующего использования данных.
Список литературы:
- ЗасовинЭ.А., Мировицкий Д.И. Волоконно-оптические преобразователи в системах передачи данных // Сб. «Итоги науки и техники». — М:ВИНИТИ, 1991. — Сер. «Связь». — Т. 8.
- J. Jung //Characterisation of FBG sensor interrogating based on a FDML wavelength swept laser // Opt. Express 16(21)/ 16552-16560, 2008.
- Ezbiri, S.E. Kanellopoulos and V. A. Handerek //High resolution instrumentation system for fibre-Bragg grating aerospace sensors // Opt. Commun./ 150(1-6), 43-48, 1998.
- Li // Fiber grating sensing interrogation based on an InGaAs photodiode linear array // Appl. Optics./ 46(3), 283-286, 2007.
- Bodendofer //Comparison of different peak detection algorithms with regards to spectrometric fiber Bragg grating interrogation systems // in Proc. International Symposium on Optomechatronic Technologies, Istanbul, Turkey/ pp. 122-126, IEEE Computer Society, Piscataway, NJ , 2009.[schema type=»book» name=»БЛОК СИНХРОНИЗАЦИИ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ ВОЛОКОННО — ОПТИЧЕСКОГО ДАТЧИКА» description=»В данном докладе рассмотрен принцип работы оптоволоконной решётки Брегга и блока синхронизацией, выявлены основные особенности и недостатки.» author=»Файзуллин Ренат Илдусович, Малых Дмитрий Вячеславович, Галин Артем Викторович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-02-21″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_25.07.15_07(16)» ebook=»yes» ]