
Процесс добычи полезного ископаемого можно представить в виде четырех основных этапов: подготовка, выемка и транспортировка горной породы, а также отвалообразование. Каждый из этих этапов зависит от предыдущего, и отсутствие согласованности между ними приводит к простоям и, следовательно, к финансовым потерям. На данный момент, внедрение навигационной системы GPS-ГЛОНАСС на горные машины позволяет отслеживать их местоположение на карьере, однако, эти координаты используются лишь для мониторинга, но не для управления. Таким образом, решение проблемы автоматизации открытых горных работ требует комплексного решения.
В настоящий момент современные информационные технологии активно используются для решения задач автоматизации карьеров. Наиболее перспективные работы в этом направлении – «Интеллектуальный карьер» компании-резидента «Сколково» «ВИСТ Групп» и «Умный карьер VEI Kiosk» компании «ТЕХНОКОН-Новосибирск».
Первая разработка связана с использованием роботизированного дистанционно-управляемого автосамосвала на базе «БелАЗ». Самосвалом дистанционно управляет оператор, рабочее место которого оборудовано дисплеями и аналогично по функциональности оборудованию в кабине автосамосвала. Таким образом, самосвал в данном проекте не является полностью роботизированным, так как управленческие решения принимает человек [3, c.10-12]. Следующим этапом проекта запланирована автоматизация вскрышных работ (создание роботизированных экскаваторов и погрузчиков), однако, информации об успешном испытании данного этапа нет. Несмотря на успехи данного проекта, в нем есть и недостатки, которые, в первую очередь, заключаются в централизованном управлении и отсутствии системного подхода к задаче (не рассматривается взаимное влияние узлов системы) [3, с. 9].
Вторая разработка сводится к автоматизации регистрации грузового транспорта совместно с бортовой системой взвешивания. По сути, несмотря на название «Умный карьер», речь идет об автоматизации с центральной ролью оператора, а не о роботизированной системе.
Таким образом, рассмотренные решения являются перспективными, но не решают всех проблем, возникающих в процессе работы карьера. Рассмотрев решения и их преимущества и недостатки, было принято решение использовать мультиагентный подход к автоматизации открытых горных работ.
Мультиагентное управление (Multiagent Conrol – MAC) является одним из наиболее перспективных направлений в управлении сложными системами. В основе мультиагентного подхода лежит понятие интеллектуальных агентов. В отличие от распределенных систем, в которых знания и ресурсы распределяются между агентами, но управление происходит посредством органа общего командного управления, в мультиагентных системах решение получается на основе взаимодействия самостоятельных агентов. Одно из ключевых полезных свойств агентов — это интеллектуальное поведение, которое может быть заложено в каждого из них в соответствии с общим подходом к решению задачи, в рамках которого требуется взаимодействие многих агентов, работающих параллельно на одной или нескольких машинах одновременно. Преимущество мультиагентных систем заключается в способности динамически адаптироваться к изменяющимся условиям, что позволяет говорить о возможности создания на основе данного подхода динамически реконфигурируемой интеллектуальной системы управления.
Мультиагентные системы используются в задачах, где методы централизованного решения менее эффективны. Это такие задачи, как логистика, моделирование, сбор и обработка информации, управление сложными автоматизированными системами и т.д. К таким сложным системам можно отнести и систему автоматизированного управления открытыми горными работами.
Говоря об автоматизации открытых горных работ, можно рассмотреть систему «экскаватор – самосвал – разрез» как мультиагентную систему, где каждый из агентов представляет собой интеллектуальную мехатронную систему. Агенты системы представлены на рисунке 1.
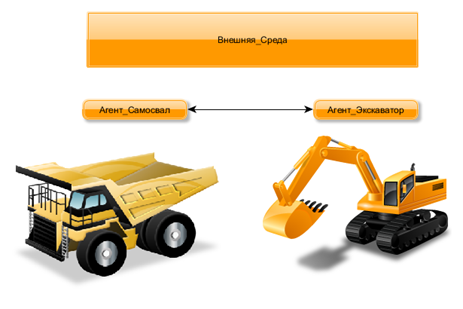
Рисунок 1. Агенты системы управления карьером
Мехатронная система представляет собой совокупность синергетически связанных механических, силовых, электронных и информационных компонентов, что позволяет использовать данный термин для горных машин [1, c. 53]. Данный термин предпочтительнее, чем «управляемый электропривод», потому как помимо управления приводами необходимо учитывать значимость интеллектуальной системы управления, которая является программным компонентом системы.
Спецификация поведения, взаимодействия и архитектуры агентов мультиагнетной системы определяется стандартом FIPA (Foundation for Intelligent Physical Agents). В этом стандарте так же определено понятие агентной платформы – системы, в рамках которой реализуется взаимодействие агентов. Для таких платформ были специфицированы три выделенных служебных роли агентов:
1) Система управления агентами (Agent Management System – AMS) –отвечает за доступ к справочнику всех агентных идентификаторов (AID).
2) Справочный агент (Directory Facilitator – DF) – предоставляет информацию о наличии сервисов у агентов.
3) Сервис транспорта сообщений (Message Transport Service – MTS) – отвечает за передачу сообщений между агентами в рамках одной платформы, а также за связь с агентами в других платформах [2, c.101].
Структура взаимодействия агентов в соответствии с этим стандартом представлена на рисунке 2.
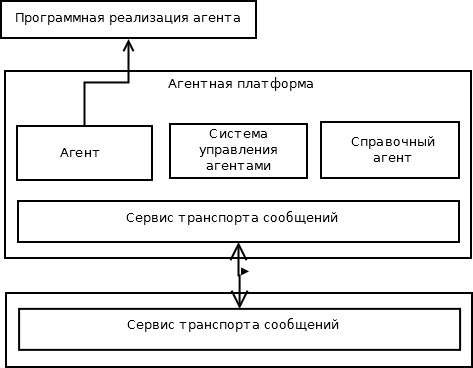
Рисунок 2. Архитектура FIPA
Распространенными инструментами для программной реализации мультиагентных систем в соответствии со стандартом FIPA являются фреймворки JADE и Jason, написанные на языке Java, а также ZEUS, имеющий визуальный редактор и генератор кода. А в качестве математического аппарата для моделирования мультиагентных систем можно применить вложенные сети Петри [4, с.344-347]. Планируется применить эти инструменты для реализации мультиагентного управления открытыми горными работами.
Список литературы:
- Горбатов П.А., Косарев В.В., Стадник Н.И. Концептуальная характеристика сложных горных машин как мехатронных систем// Научные труды ДонНТУ, выпуск 104-Донецк: ДонНТУ, 2005. – С. 53-61.
- Poslad S, Charlton P. Standardizing agent interoperability: the FIPA approach. In: Michael Luck, Vladimir Marik, Olga Stepankova, Robert Trappl (Eds.): Multi-Agent Systems and Applications, LNCS, Vol. 2086, 2001, pp. 98-117.
- Клебанов Д. А. Разработка технико-технологических решений по созданию и применению роботизированных систем грузоперевозок на открытых горных работах: автореф. дисс. канд. техн. наук., Москва, 2015.
- Ломазова И. А. Вложенные сети Петри и моделирование распределенных систем// Программные системы: теория и приложения: Наука. Физматлит, 2004. – С.337-352.[schema type=»book» name=»АВТОМАТИЗАЦИЯ ОТКРЫТЫХ ГОРНЫХ РАБОТ НА ОСНОВЕ МУЛЬТИАГЕНТНОГО ПОДХОДА» description=»В статье рассматривается вопрос применения мультиагентного подхода к управлению открытыми горными работами на примере системы «экскаватор – самосвал – разрез». Каждый интеллектуальный агент системы представляется как мехатронная система. Сравниваются решения в области автоматизации карьеров и предлагается решение, основанное на мультиагентном управлении. » author=»Волкова Евгения Алексеевна, Дружинин Алексей Владимирович, Полузадов Владимир Николаевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-02-02″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_26.09.15_10(18)» ebook=»yes» ]