
Сложность освоения глубоководных районов Мирового океана, необходимость работы подо льдом и на значительном удалении от базовых станций радионавигационных систем без возможности уточнения местоположения по данным спутниковых или радионавигационных систем создает невероятные трудности при освоении богатств континентального шельфа арктических морей.
Сложная ледовая обстановка не всегда позволяет использовать суда с ультра-короткобазными и короткобазными гидроакустическими навигационными системами, а развертывание длиннобазной системы требует значительных усилий и также затруднительно в ледовых условиях. Наиболее актуальна данная проблема для автономных необитаемых подводных аппаратов (АНПА) повышенной автономности, а также подводных лодок.
В настоящей статье автор попытался описать техническое решение, способное повысить возможности средств освоения океана в тяжелых условиях арктических морей, а именно – использование в качестве основы позиционирования — гидроакустических образов поверхностей дна.
Гидроакустический образ – совокупная информационная сущность, включающая в себя обработанные данные от бортовых гидроакустических средств, навигационного оборудования и датчиков параметров среды, интерпретируемая в виде принятой в АНПА навигационной поверхности.
Навигационная поверхность – модель представления данных о рельефе дна, построенная по регулярному принципу, имеющая в каждом узле регулярной структуры уникальную характеристику рельефа дна или набор таковых, а также неопределенность их оценок, где неопределенность – статистическая оценка вероятной величины ошибки.
Данное определение отличается от приведенного в [1] в сторону обобщения данных от всех возможных источников информации о рельефе дна
В общем случае к навигационным поверхностям можно отнести:
— морские навигационные карты;
— батиметрические карты;
— регулярные цифровые модели рельефа;
— регулярные цифровые модели силы обратного рассеивания;
— регулярные цифровые грунтовые модели;
— мозаичные гидролокационные карты.
Методы, описанные в [1] делают навигационное ориентирование по данным цифровых моделей рельефа и батиметрических карт достаточно тривиальным, что описано в патенте US, а также в патентах РФ …. . В патенте РФ справедливо указывается на недостатки таких способов позиционирования, в качестве контраргумента авторами …рассматривается изменчивость донных структур, что может быть справедливо для мелководных районов, подверженных ледовой экзарации, районов интенсивного судоходства и активного ведения промыслов. Однако, доводы авторов представляются достаточно сомнительными в условиях, актуальных для настоящей статьи – геоморфологическое строение глубоководных районов арктических морей, претерпевает изменения длительность которых измеряется тысячами лет, что с уверенностью позволяет считать гипотезу о возможности навигационного ориентирования по данным оценок характеристик рельефа дна, имеющей право на существование.
В работе [2] приведены методы повышения качества и выявления скрытой информации изображений формируемых на основе данных гидролокационных средств, которые могли бы служить целям навигационного ориентирования при условии точного нанесения на карту и подробного описания фарактерных объектов, которые можно распознать и по которым можно ориентироваться.
В отличие от приведенных в [1] методов, автор попытался представить процесс навигационного ориентирования в не столь механистической форме, как производится формирование навигационных поверхностей в гидрографическом программном обеспечении, основная задача которого – представление информации, но не принятие на ее основе оптимального решения.
Общее, что объединяет методы, описанные в [1], [2] – трехмерная реконструкция поверхности дна и донных объектов. В работе [2] описаны также процессы трехмерной реконструкции донных объектов за один или несколько галсов за счет использования длины акустической тени, а также синтез стереоскопических изображений рельефа и объектов на нем по данным ГБО за счет использования при расчете параллакса длины акустической тени или данных о глубине точки рельефа.
Однако, дно, к примеру Баренцева моря, или приполюсные районы Северного Ледовитого океана представляет собой, по большей части, равнину, со слабо выраженными перепадами высот и малым количеством «характерных» донных объектов. Поэтому для задач навигационного ориентирования требуются методы, основанные на других принципах анализа гидроакустической информации, изложенных автором в настоящей статье.
Пусть существует множество М объектов распознавания, определенное навигационной поверхностью, где sÎM – объект распознавания (образ).
I(s,t,V):M→N, N={1,2…n} – функция-индикатор, разбивающая пространство М на n непересекающихся классов, число классов определяется полнотой наполнения навигационной поверхности, для наглядности можно рассматривать следующие классы:
— h – глубина места;
— g – сила сигнала обратного рассеивания.
D – пространство полученных данных, определяемое составом и характеристиками бортового гидроакустического оборудования. C(s,t,v):M→D, функция ставящая в соответствие каждому объекту s точку C(s) в пространстве полученных данных. Вектор C(s) – это образ объекта, воспринимаемый БГАС. В пространстве полученных данных определены непересекающиеся множества точек Kh⊂D, Kg⊂D соответствующим образам вышеописанных классов.
P(C):D→M – решающее правило – оценка для данных навигационной поверхности на основании полученных данных.
Пусть (hÚg)i=C(si), где i=1,2…N – доступная информация о функциях I(s) и D(s), Ii и Di – есть множество прецедентов.
Задача навигационного ориентирования заключается такого решающего правила P(C), чтобы распознавание проводилось наиболее достоверно. Для навигационного ориентирования будем считать пространства образов и полученных данных эвклидовыми. Эффективность решающего правила измеряют частотой появления правильных решений. Оценка правильности решения характеризуется вероятностной мерой minP{P(C(s))≠I(s)}.

Рисунок 1. Схема функциональная способа.
Целям навигационного ориентирования, подходит Байесовский подход, где за основу берется предположение о существовании вероятностной меры на априорном пространстве образов (навигационной поверхности), которая может быть либо известна, либо оценена.
Пусть задано 2 класса W1 и W2 и вероятность P(WiÚC) того, что неизвестный образ, представляемый вектором С, принадлежит классу Wi. Современные гидрографические комплексы обеспечивают комплексную обработку от средств измерения, как глубины, так и определения типа грунтов, а точнее измерения силы сигнала обратного рассеивания – поэтому, для описываемой задачи рассматриваются 2 класса.
Логично, если решающее правило относит объект к тому классу, для которого апостериорная вероятность P(WiÚC) выше, т.е. если P(W1ÚC)> P(W2ÚC), то С классифицируется в W1, иначе в W2. Таким образом, для решающего правила необходимо получить апостериорные вероятности и задача сравнения сведется к вычислению величин P(W1), P(W2), P(W1ÚC), P(W2ÚC). Учитывая априорный характер P(Wi) и известность функций правдоподобия С по отношению к Wi задача принимает вполне тривиальный характер. Если априорные вероятности и функции правдоподобия неизвестны (малая информативность навигационной поверхности), то их можно оценить методами математической статистики на основе множества прецедентов.
Рассмотрим данный способ на примере навигационной поверхности в виде цифровой модели рельефа, уточненной поверхностью неопределенностей. Множество объектов распознавания представляет собой множество глубин в узлах регулярной цифровой модели рельефа (рисунок 2). Пространство полученных данных характеризуется одномерными массивами глубин, полученными в результате лоцирования дна, распределенных перпендикулярно курсу движения (рисунок 3).
Имитационный эксперимент проводился с помощью
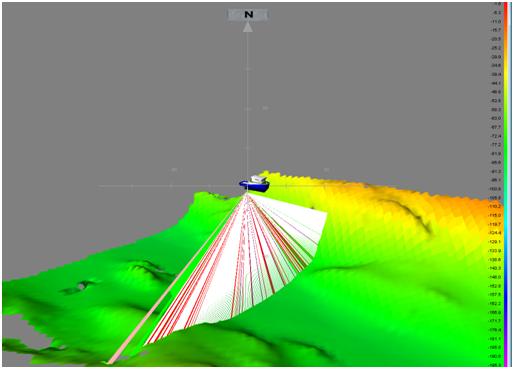
Рисунок 2. Формирование цифровой модели рельефа
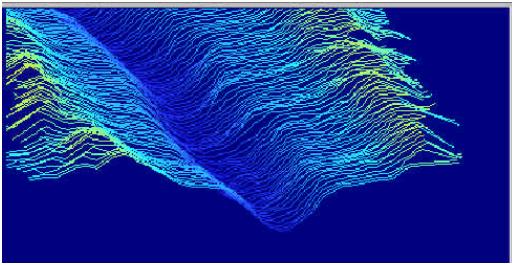
Рисунок 3. Пространство полученных данных.
Поверхность неопределенности задает решающее правило, при соответствии которому измеренные глубины отождествляются с глубинами навигационной поверхности. Распознавание глубины целесообразно проводить в трехмерном пространстве, как поперек, так и вдоль курса, причем для распознавания глубин распределенных вдоль курса требуется осуществлять выборку данных на протяжении времени, позволяющем выявить уникальные градиенты уклона или характерные объекты, что в свою очередь достигается статистической обработкой сигнала. Для однолучевого эхолота такой способ является единственным, для профилографа — выборка данных глубин производится в количестве равном количеству типов грунта По такому принципу построены алгоритмы калибровки многолучевых эхолотов. На рисунке 4 представлен продольный профиль изменения глубины (фиолетовым цветом) разными цветами показаны кривые решающих функций.
Следует помнить, что точность измерения глубин многолучевым эхолотом зависит от качества профилирования вертикального распределения скорости звука, при невыполненном профилировании полезная ширина диаграммы направленности сужается до 30-50°, в результате чего, увеличивается необходимое время для обработки данных.
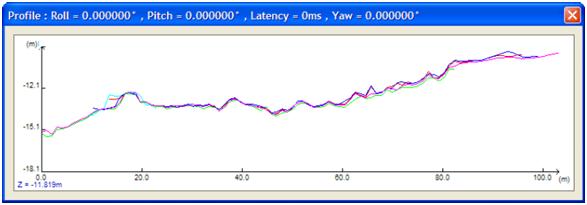
Рисунок 4. К вопросу о продольной выборке глубин.
При значительных площадях района проведения работ нецелесообразно производить перебор значений для всего района, достаточно ограничиться районом в пределах 3s ошибок счисления от счислимой траектории.
Данный способ был опробован в ходе экспедиции «Арктика-2012», во время работ на троге Франц-Виктория, где эталонная навигационная поверхность, полученная в мае 2012, послужила основой для определения местоположения заказа в ноябре того же года, полученная при этом точность была сопоставима с точностью спутниковой навигационной системы (как показала последующая обсервация).
Аналогичным образом, может быть определено местоположение по данным донной стратификации или гидролокационной съемки дна.
Список литературы:
- Э.С. Зубченко. Навигационная поверхность – новая форма цифровой модели для представления данных съемки рельефа дна в интересах повышения безопасности мореплавания: сборник трудов конференции «Навигация и гидрография» №27. СПб.: ГНИНГИ, 2008 г. – с. 77;
- А.Э. Сажнева. Разработка методов повышения качества и выявления скрытой информации изображений, формируемых на основе данных гидролокационных средств: диссертация на соискание ученой степени кандидата технических наук. М.: ИО РАН им. Ширшова, 2008 г. – 196 с;
- Ю.Г. Фирсов. Основы гидроакустики и использования гидрографических сонаров: учебное пособие. СПб.: Нестор-История, 2010 г. – 350 с;
- А.Л. Горелик, В.А. Скрипкин. Методы распознавания. 4-е изд. М.: Высшая школа, 1984, 2004. — 262 с.[schema type=»book» name=»ФОРМИРОВАНИЕ ГИДРОАКУСТИЧЕСКИХ ОБРАЗОВ ПОВЕРХНОСТЕЙ ДНА ДЛЯ ЦЕЛЕЙ НАВИГАЦИОННОГО ОРИЕНТИРОВАНИЯ» description=»Статья посвящена проблеме определения местоположения подводного средства движения по данным бортовых гидроакустических средств, используя Байесовский метод теории распознавания образов. Приведенный в статье способ был впервые опробован при проведении работ по оконтуриванию внешней границы континентального шельфа РФ в Арктике в 2012 году. В настоящее время, применение методов анализа гидроакустических образов в целях навигационного обеспечения подводных средств движения реализуется в программном обеспечении бортовых систем управления.» author=»Попко Артем Олегович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-13″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.05.2015_05(14)» ebook=»yes» ]