
ВВЕДЕНИЕ
Интеллектуальная геоинформационная система (ИГИС) − это геоинформационная система, которая включает интегрированные средства искусственного интеллекта, а также прикладные компоненты, реализующие наукоемкие пользовательские модели количественного обоснования вырабатываемых рекомендаций [1, 7]. Технологически интеллектуализация ГИС основана на концепции сервис-ориентированной архитектуры, т.е. декомпозиции архитектуры системы на отдельные сервисные компоненты, служащие строительными блоками для многоплатформенных распределенных приложений.
Наиболее сложным уровнем исследований и технологических решений при разработке сервисов ИГИС является слияние данных − процесс соединения (комплексирования) данных от различных источников. Цель слияния определяется как получение информации более высокого качества и в значительной степени формируется областью применения [1, 10, 11]. Цель реализуется на основе сравнительной оценки результатов по вариантам различных комбинаций виртуальных сценариев поведения объекта.
Особенности данного уровня – это узкая ориентация на конкретного пользователя и необходимость использования постоянно расширяющегося и обновляющегося математического и программного инструментария.
- ПРОБЛЕМЫ ОПИСАНИЯ УСЛОВИЙ НЕОПРЕДЕЛЕННОСТИ
Данные, поступающие от различных источников, всегда связаны с такими эффектами неопределенности как неточность и нечеткость диффузных, трудно формализуемых и слабо структурированных массовых процессов. Согласно обзорным работам [9,10,11], в настоящее время в отношении различных вариантов условий неопределенности принято использовать: для описания неточности данных − методы теории вероятностей, нечеткости – теории размытых множеств, теории возможностей, теории грубых множеств, теории свидетельств (или теории очевидности) Демпстера-Шаффера [6].
В историческом аспекте теория вероятностей в течение длительного времени использовалась для описания всех типов неопределенных данных, поскольку ей просто не было альтернатив. Размытые множества и рассуждения на основе функций доверия и правдоподобия были предложены для преодоления ограничений этой теории, при этом они могут дополнять друг друга, как, например, такие гибридные подходы как теория размытых грубых множеств (FRST) и размытая теория Демпстера-Шаффера (Fuzzy DSET).
Еще одно направление, альтернативное классической теории вероятностей, основано на теории случайных множеств [9].
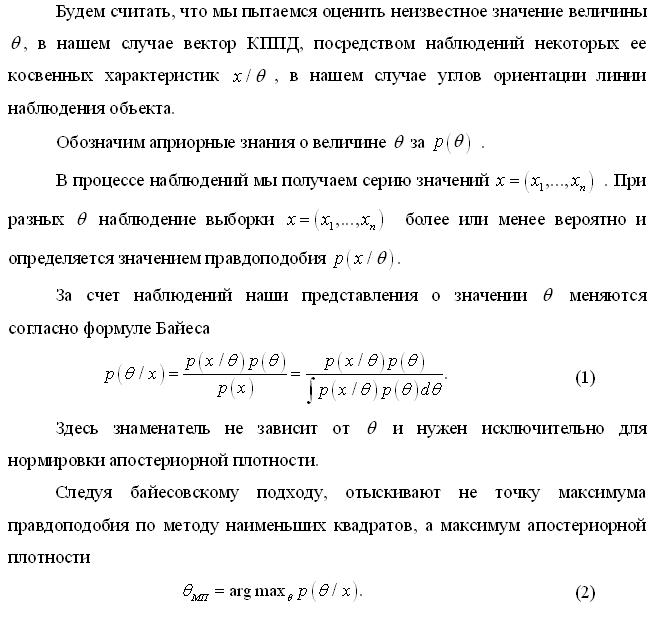
Наконец, современный подход к оценке апостериорных распределений основан на применении байесовских процедур.
В современной теории вероятностей существуют два подхода к тому, что называть случайностью.
В частотном подходе предполагается, что случайность есть объективная неопределенность, и для снижения или исключения ее влияния требуются большие выборки наблюдений. Основным методом статистического оценивания является метод максимального правдоподобия (Фишер, 1930-ые гг.), который предполагает проведение достаточно большой серии испытаний.
Однако далеко не всегда при оценке вероятности события удается провести серию испытаний. Байесовские же методы работают даже при объеме выборки 0. В этом случае апостериорное распределение идентично априорному. В байесовском подходе предполагается, что случайность есть мера нашего незнания.
В качестве оценок неизвестных параметров выступают апостериорные распределения, т.е. решить задачу оценивания некоторой величины, − значит найти ее апостериорное распределение
- ОБЩАЯ ВЕРОЯТНОСТНАЯ МОДЕЛЬ И БАЙЕСОВСКИЕ ВЫВОДЫ
Итак, в условиях неопределенности типа неточности вероятностные методы реализуют слияние данных на основе их вероятностного описания. В основе этих методов лежит Байесовское оценивание, при этом все выводы о неизвестных величинах получаются в форме их апостериорного распределения. Кроме того, во многих постановках задач в реальном времени результаты наблюдений поступают последовательно, и интерес представляет получение выводов при последовательном обновлении этого апостериорного распределения. Будем руководствоваться именно этим практически важным подходом.
При решении задачи ограничимся данными, которые допускают представление в пространстве состояний с помощью Марковских, но, возможно, нелинейных и негауссовых моделей, хотя можно рассматривать и более общие постановки.
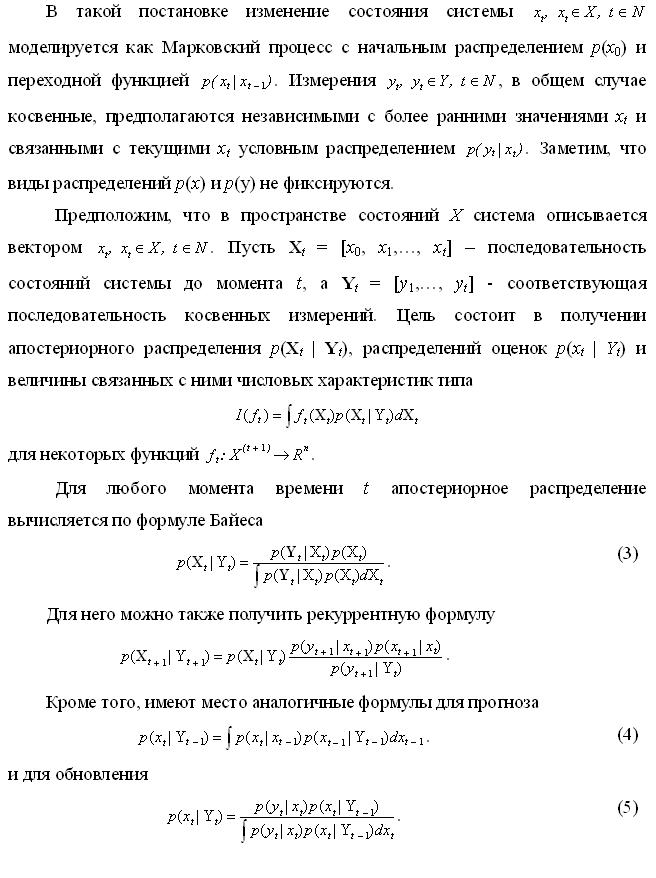
На практике соотношения (3)–(5) имеют только теоретическое значение, поскольку требуют вычисления сложных многомерных интегралов. Байесовскую оценку в аналитической форме удается получить только для достаточно редких специальных постановок. Хорошо известный фильтр Калмана получается за счет введения ряда упрощающих (зачастую отягощающих и не слишком реалистичных) предположений. Тем не менее, на нем основаны самые популярные алгоритмы слияния данных, прежде всего благодаря его простоте, легкости в применении и оптимальности по критерию среднеквадратической ошибки. Свойства этого фильтра глубоко исследованы как теоретически, так и на уровне различных практических приложений. В то же время, он в высокой степени чувствителен к выпадающим измерениям и плохо подходит для приложений, в которых характеристики погрешностей не удается задать в простой параметрической форме.
Для систем с нелинейной динамикой приходится ориентироваться на аппроксимации приведенных распределений в различных упрощенных постановках [8, 9]. Например, расширенные фильтры основаны на аппроксимациях отрезками разложений Тейлора относительно текущей оценки и эффективно применяются для некоторых ограниченных классов моделей нелинейности.
- ПОЛИСЦЕНАРНЫЙ ПОДХОД К ОЦЕНИВАНИЮ ПАРАМЕТРОВ ДВИЖЕНИЯ
Альтернативой рассмотренным подходам являются решетчатые методы, основанные на построении набора виртуальных сценариев поведения объекта слежения и прогнозировании его ожидаемого движения в рамках каждого из этих сценариев. Сравнение прогноза и результатов текущих измерений позволяет приписать каждому сценарию некую меру качества, которая интерпретируется как апостериорная вероятность. Так возникает система последовательно уточняемых вероятностных распределений на множестве сценариев, из которых на любом шаге можно сформировать, например, точечные и доверительные оценки оцениваемых параметров.
Генетически эти методы восходят к процедурам эмпирического Байесовского оценивания [2]. Их можно свести также к грубому оценивания интегралов в (1)-(3) простейшими методами прямоугольников. Такие подходы интуитивно понятны, но, к сожалению, оказываются чрезмерно громоздкими даже при умеренной размерности вектора состояний.
Монте-Карловские техники аппроксимации вероятностных распределений [7, 8] оказываются наиболее мощными и, как аналог статистического имитационного моделирования [16], пользуются в настоящее время наибольшей популярностью. Они являются также самыми гибкими, поскольку не требуют введения каких-либо исходных предположений относительно распределений погрешностей. Эти методы представляют важнейшую альтернативу фильтру Калмана для систем, характеризующихся нелинейной динамикой и негауссовыми погрешностями.
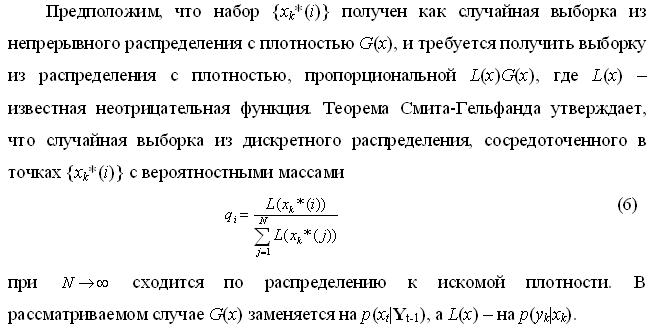
Идея состоит в том, чтобы использовать взвешенный набор случайных выборок как аппроксимацию вероятностного распределения, при этом апостериорное распределение получается в виде их взвешенной гистограммы. Случайные выборки эмулируются в соответствии с априорным распределением, а их веса обновляются в соответствии с функцией правдоподобия поступающих измерений. Эти методы можно интерпретировать как оценивание интегралов в (1)-(3) методами Монте-Карло.
Как и фильтр Калмана, Монте-Карловские фильтры чувствительны к выбросам и требуют введения дополнительных переменных для обеспечения робастности. Такие фильтры плохо подходят для задач большой размерности, поскольку требуемое число выборок с ростом размерности растет экспоненциально.
Доказательства правомерности предлагаемых подходов основаны исключительно на асимптотических результатах. В частности, процедура обновления до некоторой степени обоснована в работе Смита и Гельфанда [14].
Привлекательным вариантом развития Монте-Карловских фильтров при большой размерности вектора состояний являются Монте-Карловские Марковские цепи (MCMC) [9, 10]. Идея состоит в том, чтобы облегчить аппроксимацию многомерных плотностей, используя для получения выборок Марковскую цепь вместо простого многократного эмулирования их случайным образом. В такой постановке Марковская цепь – это последовательность случайных выборок, генерируемая в соответствии с заданной матрицей вероятностей перехода. Эту технику впервые предложили Метрополис, Улам и Хастингс. Они же показали, что сходимость алгоритма зависит от адекватного выбора начального распределения и матрицы вероятностей перехода. Проблемы оптимизации по этим параметрам в настоящее время активно изучаются [10].
Частным случаем техники Метрополиса-Хастинга является алгоритм Гиббса [9]. Его основное преимущество состоит в том, что он требует эмулирования только одномерных выборок, хотя и в очень большом количестве. При этом он допускает работу в режиме параллельных и матричных вычислений.
Достаточно подробные обзоры рассмотренной техники и ссылки на более ранние оригинальные источники можно найти в работах [9, 10, 11].
- ТРАЕКТОРНЫЙ ФИЛЬТР ДЛЯ УСЛОВИЙ УГЛОВЫХ ИЗМЕРЕНИЙ
Рассмотрим вариант постановки и решения статистической задачи «only bearings» [8, 9], один из специально рекомендованных в литературе для отработки новых алгоритмов нелинейной и негауссовой фильтрации. Более продвинутые постановки рассмотрены, например, в работах [4, 5, 12, 13].
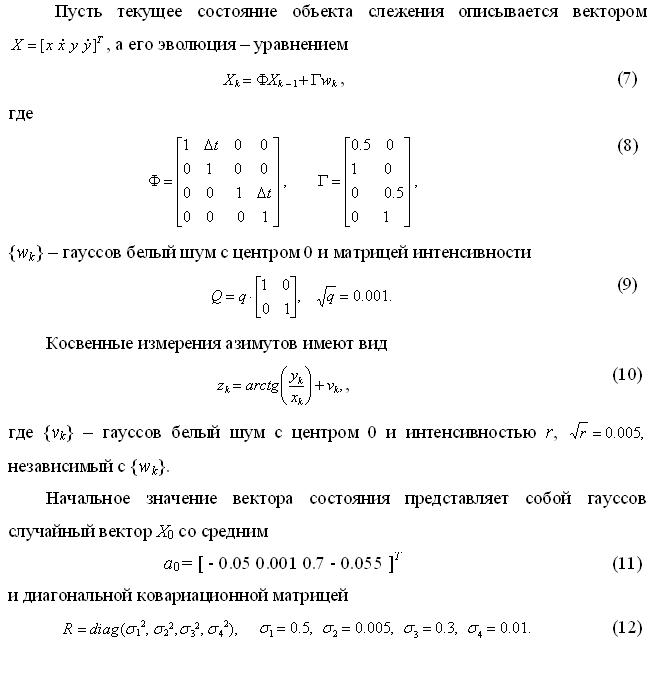
Таким образом, основная особенность данной постановки состоит в том, что для определения параметров движения объекта имеются только измерения азимутов относительно наблюдателя, находящегося в начале координат. Решение здесь возможно путем перебора значений параметров движения в различных сочетаниях курса, скорости и дистанции на некоторой четырехмерной решетке, с оценкой их соответствия текущим результатам нелинейных косвенных измерений.
Решение. Использование техники Монте-Карло дает некоторую экономию ресурсов, но для представления результатов все равно требуется их интерполяция на равномерную сетку. На рисунке представлен процесс эволюции двумерной апостериорной плотности для части вектора состояния − параметров положения. Для наглядности использованы ее гауссовы аппроксимации.

Рисунок. Эволюция апостериорной плотности параметров положения (гауссовы аппроксимации)
Решение значительно облегчается, если имеются обоснованные упрощающие предположения типа
гипотезы о равномерном и прямолинейном движении объекта слежения. В этом случае проблема сводится к плохо обусловленной задаче нелинейной регрессии [4, 5]. При наличии априорного распределения параметров задача теряет свойство плохой обусловленности, а в рассматриваемой постановке на каждом шаге для этого имеется распределение виртуальных сценариев поведения объекта, используемое в качестве априорного.
ВЫВОДЫ
Основное преимущество рассмотренного подхода состоит в том, что он не налагает никаких ограничений на вид функций в уравнениях динамики и измерений. Основные требования состоят в том, что:
- распределения p(x1), wk и vk известны и допускают моделирование на основе техники Монте-Карло;
- распределение p(zk | Xk) известно.
На выходе фильтра на каждом шаге появляется векторная выборка, которой можно распорядиться различными способами. Например, апостериорную вероятность попадания в некоторую зону можно оценить как долю выборочных значений, попавших в эту зону. Если имеются основания полагать, что апостериорное распределение унимодально, можно получить статистические характеристики каждой компоненты вектора состояний и любой функции от них.
Список литературы:
- Интеллектуальные географические информационные системы для мониторинга морской обстановки //ред. Юсупов Р.М., Попович В.В. – СПб.: Наука, 2013. – 284 с.
- Кокс Д., Хинкли Д. Теоретическая статистика. – М.: Мир, 1978. – 560 с.
- Макшанов А.В. Рестриктивное оценивание в задачах траекторного слежения. – Тр. межд. семинара «Интеграция информации и геоинформационные системы», 25-27 сентября 2005 г., СПб, с.182-187.
- Макшанов А.В., Поленин В.И. , Прокаев А.Н. Решение задачи определения координат положения и параметров движения объекта по данным угловых координат. — Морская радиоэлектроника, 2014, №3(49), с.38-42
- Carlin B.P., Polson N.G., Stoffer D.S. A Monte-Carlo approach to nonnormal and nonlinear state space modeling. – JASA, 1992, No. 87, pp. 493-500.
- Dempster A. P. A generalization of Bayesian inference. — Journal of the Royal Statistical Society, Series B, 1968, Vol. 30, pp. 205-247.
- Doucet A., de Freitas N. (ed.). Sequential Monte-Carlo methods in practice. – New York: Springer, 2001.
- Gordon N., Salmond D., Smith A. Novel approach to nonlinear/nongaussian state estimation. – Proc. Inst. Elect. Eng., ser.F, 1993, v.40, №2, pp.107-113.[schema type=»book» name=»ОЦЕНИВАНИЕ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ПРИ ФОРМИРОВАНИИ СЕРВИСОВ ИНТЕЛЛЕКТУАЛЬНЫХ ГЕОИНФОРМАЦИОННЫХ СИСТЕМ» description=»Рассматривается решение задачи формирования сервисов интеллектуальных геоинформационных систем оценивания состояния подвижного объекта при априорной неопределенности его поведения с оптимальным слиянием информации от различных источников. Предложены новые конструкции фильтров для оценивания параметров движения объекта в условиях нелинейности и негауссовости. » author=»Макшанов Андрей Владимирович, Поленин Владимир Иванович, Попович Татьяна Васильевна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-11″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.05.2015_05(14)» ebook=»yes» ]