
1. Общая характеристика сетецентричной организации наблюдения
Войны шестого поколения характеризуются появлением таких характеристик вооруженного противоборства как сетецентричная организация и переход от обитаемых (пилотируемых) средств к необитаемым, роботизированным [1, 6].
Следует отметить, что сетецентричная организация или сетецентрика [6] является необходимым условием реализации бесконтактного поражения и роботизации, т.е. ключевым признаком войн шестого поколения.
В морской подводной среде систему наблюдения целесообразно формировать как систему датчиков, объединенных в единую информационную сетевую подводную систему наблюдения (ПСН), соответствующую современным представлениям о сетевых информационных структурах [3, 6]. Эта задача является актуальной и проблематичной для варианта использования пассивных датчиков.
Эффект, достигаемый простым включением в сеть всех действующих сил и средств наблюдения, является неполным и характеризует лишь совершенствование информационных взаимосвязей. Истинная сетецентрика достигается покрытием сетью и расположенными в ее узлах датчиками всего военно-географического пространства, не оставляя неосвещенным ни одного «белого пятна» в зоне интересов вооруженных сил. Для достижения этого эффекта должна быть создана, распределена в военно-географическом пространстве и увязана в единую информационную сеть система из десятков и сотен тысяч датчиков на необитаемых роботизированных автономных носителях во всех средах пространства.
Одним из наиболее простых и доступных вариантов сетевых архитектур является вариант стайной (в виде «роя») архитектуры [3]. В этой структуре все наблюдатели являются полностью равноценными и однородными средствами. Для эффективного выполнения задачи совместной и синхронной обработки данных наблюдения «рой» идентичных средств дополняется специальным центральным «хабом».
В соответствии с концепцией войн шестого поколения целесообразно рассматривать в качестве датчиков автономные необитаемые подводные аппараты (НПА)[7].
2. Сетевая модель системы наблюдения
В сетевой структуре правомерно предъявить требования к датчикам по их способности обнаруживать подвижные объекты на расстояниях , где – расстояния между смежными датчиками [5, 7].
Очевидно, что при имеет место эффект дублирования элементов сетевой структуры, так что отказ, поражение или подавление отдельных элементов не будет приводить к ее деградации по интегральным свойствам. Кроме того, для сети пассивных датчиков обеспечивается возможность решать задачу локализации объектов, определения их координат и параметров движения.
В силу того, что основным режимом работы датчиков подводного наблюдения является скрытный и энергоэкономичный пассивный режим, возникает задача определения координат и параметров движения (КПДЦ) подводных объектов по данным шумопеленгования от системы стационарных датчиков.
Известны теория, научные результаты, методы и алгоритмы решения задачи локализации и сопровождения обнаруживаемых объектов по данным пассивных средств наблюдения, характеризующих подвижный носитель, совершающий маневр, обеспечивающий информативность данных измерений для решения задачи определения координат и параметров движения цели [4].
Решаемая проблемная задача определения КПДЦ отличается стационарностью местоположения датчиков и возможностью наблюдения и пеленгования объекта одновременно или последовательно более чем одним пассивным датчиком. Будем полагать, что стационарные датчики распределены случайным образом в некотором районе подводной системы наблюдения (ПСН), Структура района ПСН, в частности – кругового, с распределенными в нем датчиками с учетом случайного фактора приведена на рис. 1 (вариант). Предположение случайности распределения мест датчиков правомерно в силу влияния военно-географических условий и других факторов.
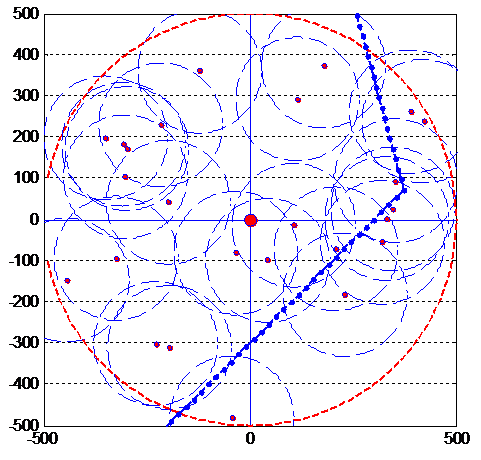
Рисунок 1. Район ПСН с распределенными в нем 25 датчиками (вариант)
Через район может следовать объект, в общем случае совершая маневр курсом и (или) скоростью (маршрут показан жирным пунктиром). Задача состоит в определении текущих координат объекта относительно геометрического центра района, а также его курса и скорости.
3. Навигационная постановка и решение задачи
В известном варианте навигационной постановки задачи предполагается формирование массива данных наблюдения за объектом от всех датчиков, имеющих акустический контакт, и периодическое решение задачи определения координат и параметров движения (КПДЦ) объекта с применением метода наименьших квадратов по непрерывно наращиваемому массиву данных. Такой подход позволяет, с течением текущего времени, повышать точность определения КПДЦ, что важно с точки зрения целеуказания, но затрудняет отслеживание возможного маневра объекта курсом и скоростью.
Предлагается иной подход, состоящий в формировании последовательности массивов данных наблюдения за объектом от всех датчиков, имеющих акустический контакт, и периодическое решение задачи определения КПДЦ объекта с применением метода наименьших квадратов к этим массивам. Эта особенность превращает рассматриваемую задачу в проблемную, требующую формирования специального алгоритма, и определяют новизну ее результатов.
Навигационная постановка задачи приведена на рисунке 2.
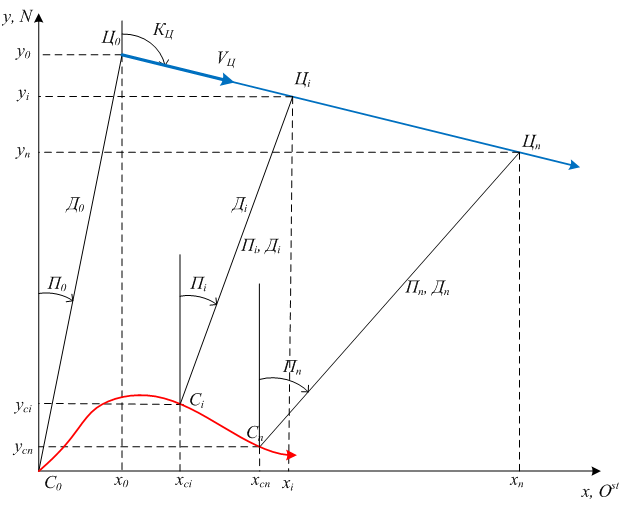
Рисунок 2.Навигационная постановка задачи
Задача основана на применении статистической процедуры МНК к совокупности (выборке) измерений, со снятием ограничений на вид маневра наблюдателя.
Известная навигационная постановка задачи состоит в формировании выборки измерений непрерывно наращиваемого объема в общем случае «n» пеленгов, составлении уравнений баланса в условной форме, их преобразовании к нормальной форме, с применением к ним рекуррентной формы процедуры МНК.
Для обеспечения свойства постоянства оцениваемого вектора состояния, он формируется как совокупность начальной дистанции и компонент вектора скорости объекта (цели) (Д0, VЦх, VЦу,).
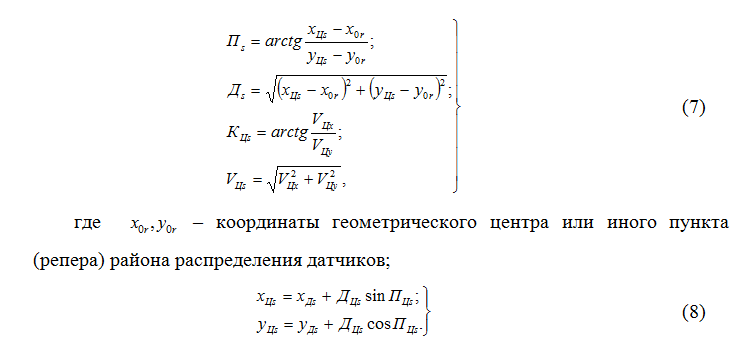
Индексируя поступающие замеры пеленга по номерам i, уравнения баланса записываются в следующем виде

Здесь неизвестными являются Д0, Дi, VЦх, VЦу, причем число неизвестных величин Дi растет с числом измерений. Так как текущая дистанция — величина переменная, и ее следует из этих уравнений исключить. Это достигается путем умножения первого уравнения на cosПi, второго на sinПi, и вычитания второго уравнения из первого.
В результате получается одно условное уравнение относительно трех неизвестных
|
|
(2) |
Далее система условных уравнений преобразуется к нормальной форме и к ним применяется процедура обработки по МНК в рекуррентной форме.
Этот известный способ неприемлем для решения задачи определения КПДЦ объекта по данным периодических измерений пеленгов системой наблюдателей, распределенных в области, через которую следует наблюдаемый объект. Дело в том, что для получения оценок КПДЦ необходимо иметь не менее четырех измерений пеленга в общем случае из различных позиций. Когда количество измерений, определяемое как произведение числа наблюдателей, имеющих контакт с объектом, на количество циклов наблюдений, значительно превышает значение 4, целесообразно перейти к динамической процедуре оценивания КПДЦ по группам измерений, что обеспечивает отслеживание возможного маневра объекта.
Это приводит к обработке измерений группами по ns измерений (i=1,..ns), в каждой из которых оцениваемый вектор состояния формируется как совокупность дистанции на момент последнего i=ns измерения в группе и компонент вектора скорости объекта (цели) (Дns, VЦх, VЦу,). Для реализации этого способа решения задачи условные уравнения (1) записываются в виде
 |
(3) |
Умножая первое уравнение на cosПi, второе на sinПi, и вычитая второе уравнение из первого, получим условное уравнение (2) в следующем виде

4. Апробация разработанного алгоритма решения задачи
На рисунке3представлены графики наблюденных и истинных значений КПДЦ объекта-цели, имеющего в эпизоде курс 45º, скорость 10 уз.
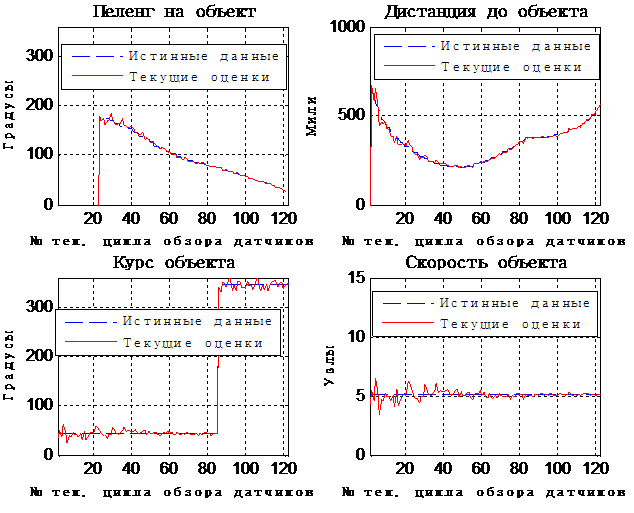
Рисунок 3. Результаты решения задачи определения КПДЦ объекта-цели, следующего через район ПСН (вариант)
Из анализа графиков следует, что точность определения КПДЦ с течением времени наблюдения возрастает. Обеспечивается практически безынерционное отслеживание маневра объекта, с некоторым увеличением уровня погрешностей оценок курса цели после его изменения. Таким образом, обеспечиваются динамические и точностные характеристики, свойственные результатам обработки данных с использованием адаптивных цифровых фильтров.
Вопрос конкретного выбора числа и взаимного размещения датчиков, выбора периода обзора и обобщения информации от датчиков, является вопросом оперативного планирования и технического проектирования района ПСН. Результаты исследовательского проектирования призваны лишь указать на информационно-технологические особенности решения этой задачи и подтвердить ее реалистичность.
Последующая актуальная задача состоит в разработке алгоритма, обеспечивающего определение КПДЦ маневрирующего объект по данным изменений пеленгов системой в общем случае подвижных датчиков (НПА).
- Гаврилкин С.Н., Поленин В.И., Попов А.М., Свирин С.К. Модель сетецентричной организации наблюдения, целеуказания и управления – М.: «Вестник Академии военных наук». 2012.
- Зубань Д.Г., Курбатов С.П. Некоторые вопросы использования автоматизированных систем обеспечения безопасности движения подвижных объектов на море / Труды 10-й научно-практической конференции «Актуальные проблемы защиты и безопасности», том 4. – СПб: 2007.
- Кондратьев А. Е. Общая характеристика сетевых архитектур, применяемых при реализации перспективных сетецентрических концепций ведущих зарубежных стран. – Военная мысль, №12, 2008. – С. 22-30.
- Макшанов А.В., Поленин В.И., Сухачев Ю.А. Современные методы решения статистических задач радиотехники по оценке параметров линейной регрессии в условиях плохой обусловленности.– Морская радиоэлектроника, №4 (18), 2006. С. 42-48.
- Поленин В.И., Сухачев Ю.А., Свирин С.К. Модель сетецентричной организации наблюдения, целеуказания и управлени. – М.: Вестник Академии военных наук, №1 (38), 2012.
- Раскин А.В., Пеляк В.С. К вопросу о сетевой войне. – Военная мысль, №3 – 2005. С. 21-26.
- Черников С.Г. Сетевая модель локализации объекта-цели с применением подводной системы наблюдения с пассивными датчиками. – Морская радиоэлектроника, №4 (26), 2008. С. 26-27.[schema type=»book» name=»СЕТЕВАЯ МОДЕЛЬ ПОДВОДНОЙ СЕТЕЦЕНТРИЧНОЙ СИСТЕМЫ НАБЛЮДЕНИЯ С ПАССИВНЫМИ ДАТЧИКАМИ» description=»В статье рассматривается подводная система наблюдения с пассивными датчиками, организованная по сетецентрическомупринципу. Система датчиков, объединенных в единую информационную сетевую подводную систему наблюдения, соответствует современным представлениям о сетевых информационных структурах. Задача обнаружения и сопровождения объектов, следующих через район расположения пассивных датчиков является актуальной, а задача определения координат и параметров движенияобъектов –и проблематичной. Приводятсяалгоритмрешениязадачииегоапробация.» author=»Поленин Владимир Иванович, Бобрышев Сергей Васильевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-02-23″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_25.07.15_07(16)» ebook=»yes» ]