
Технологии выявления дефектов с использованием для этой цели энергии ультразвуковой волны применяются уже достаточно долгое время. Преимуществом ультразвукового метода поиска дефектов является высокая чувствительность, особенно к дефектам плоскостного типа – наиболее опасного вида дефекта – невыявление которого может привести к нарушению работоспособности конструкции и даже к её разрушению. При этом место расположения и ориентация дефектов в конструкциях сильно варьируется в зависимости от условий эксплуатации, характера нагрузок и других факторов. Задача выявления дефектов, ориентация которых известно, решена. Для выявления дефектов, параллельных поверхности ввода ультразвуковых колебаний, например, таких плоскостных дефектов как расслоения, хорошо подходит эхо-метод поиска дефектов с использованием прямых совмещенных преобразователей. В случае, если дефекты ориентированы перпендикулярно поверхности и известен угол поворота дефекта на плоскости ввода, используют эхо-метод поиска дефектов с использованием наклонных преобразователей. Каждый из способов хорошо решает задачи выявления дефектов определенной ориентации. В случае, когда отсутствует информация о характерной ориентации дефектов или же наоборот известно, что вероятно наличие дефектов произвольной ориентации, следует применять комбинацию нескольких способов поиска дефектов, что однозначно усложняет процедуру выявления дефектов. Исходя из изложенного выше, очевидно, что для случаев, когда характерная ориентация дефектов не известна, разработка технологии, позволяющей выявлять произвольно ориентированные дефекты является важной и актуальной задачей.
Для решения задачи выявления разноориентированных дефектов предлагается использовать зеркально-теневой метод возбуждения горизонтально-поляризованных поперечных ультразвуковых волн электромагнитно-акустическим способом.
Зеркально-теневой способ основан на регистрации параметров ультразвуковой волны, прошедшей через металл изделия, а именно – изменении величины донного сигнала на дефектном и бездефектном участках [4, стр.248].
ЭМА способ основан на возбуждении ультразвуковых волн под действием электромагнитного поля. Физические основы и технология метода достаточно полно описаны в работах [1-3] и [5]. Способ позволяет вводить в объект контроля горизонтально-поляризованные (SH) волны. Возбуждение поперечных (сдвиговых) SH-волн с линейной поляризаций осуществляется электромагнитно-акустическим преобразователем (ЭМАП), изображенном на рисунке 1. Описываемый ЭМАП имеет индуктор удлиненной формы и магнитную систему, состоящую из двух магнитов, обеспечивающих магнитные потоки противоположного направления через области поверхности твердого слоя с наведенными вихревыми токами тоже противоположного направления. Силы Лоренца при этом синфазны в обеих областях поверхности. Они ориентированы нормально по отношению к линиям вихревого тока и параллельно поверхности слоя. Под действием сил Лоренца в поверхностном слое возникает поперечная SH-волна, распространяющаяся по нормали к поверхности слоя. Смещения частиц в волне параллельны поверхности твердого слоя и перпендикулярны виткам индуктора в линейных его частях. При таких условиях поперечная SH-волна возбуждается синфазно во всей области действия сил Лоренца.
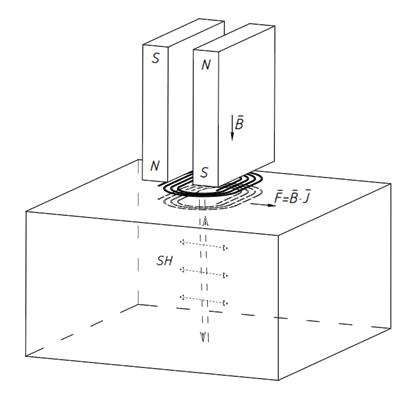
Рисунок 1 – Схема возбуждения поперечной SH-волны с линейной поляризацией
Проведенные эксперименты показали, что при прозвучивании объекта контроля поперечной SH-волной с линейной поляризацией амплитуда принятого донного сигнала на дефектном участке будет ниже амплитуды донного сигнала на бездефектном участке за счет рассеяния энергии линейно поляризованной ультразвуковой волны на дефекте. Этот эффект наблюдается при ориентации дефектов в диапазоне углов от – 30° до +30° и пороге регистрации дефектов равном 6 дБ. Для проведения эксперимента в металлическом листе толщиной 30 мм был выполнен дефект плоскостного типа глубиной 1 мм и длиной 15 мм. На бездефектную часть образца устанавливался ЭМАП с зазором между изделием равным 1 мм. Производилось измерение амплитуды донного сигнала. Далее ЭМАП устанавливался на дефектный участок, при этом ориентация дефекта и направления поляризации составляло 90° (рисунок 2). Также производилась фиксация амплитуды донного сигнала. Далее ЭМАП поворачивался на 5° и производилась фиксация амплитуды донного сигнала. Измерения выполнялись с шагом поворота датчика в 5° до тех пор, пока изменение донного сигнала на дефектном и бездефектном участке не перестало превышать 6 дБ.
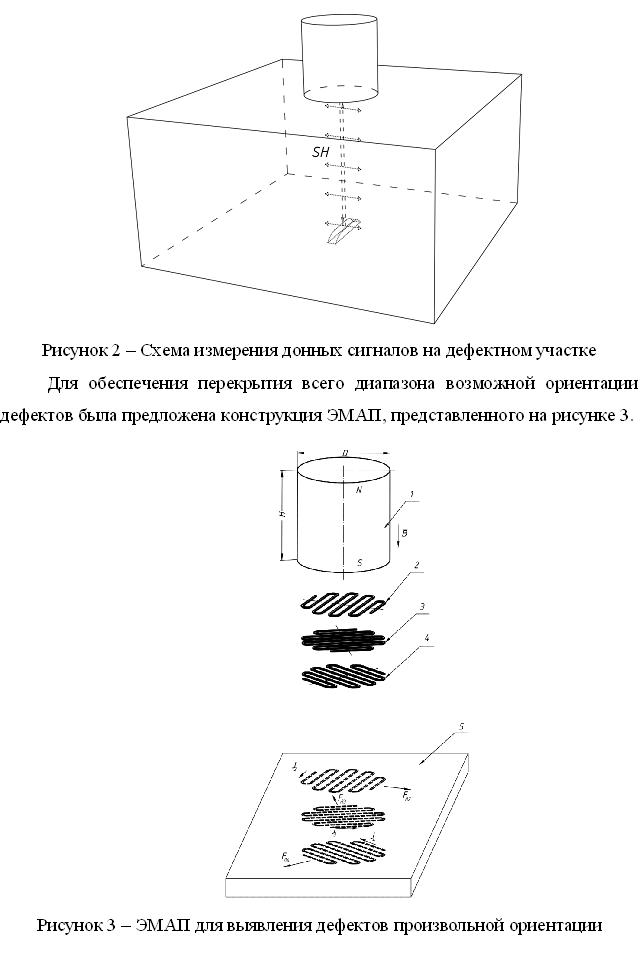
Предлагаемая конструкция электромагнитно-акустического преобразователя обеспечивает генерацию механических колебаний с поляризацией ультразвуковых волн в плоскости, параллельной поверхности ввода, под углом 120° относительно друг друга. Это достигается тем, что в электромагнитно-акустическом преобразователе, содержащем магнитную систему в виде постоянного магнита и три плоские катушки, электрически изолированные друг от друга и расположенные под магнитом одна под другой, постоянный магнит выполнен в виде сплошного цилиндра при отношении его диаметра к высоте 1:3, витки одной плоской катушки направлены под углом 120° к виткам другой катушки, а диаметр окружности, описывающей витки каждой катушки, равен диаметру постоянного магнита.
Электромагнитно-акустический преобразователь состоит из магнитной системы 1 в виде постоянного магнита, при этом постоянный магнит выполнен в виде сплошного цилиндра диаметром D и высотой Н при соотношении D/H как 1/3, и трех плоских катушек 2, 3 и 4, электрически изолированных друг от друга и расположенных под магнитом 1 одна под другой. Витки катушки 3 направлены под углом 120° к виткам катушки 2, а витки катушки 4 направлены под углом 120° к виткам катушки 3. Диаметр окружности D1, описывающей витки каждой катушки, равен диаметру D постоянного магнита 1. Далее на рисунке 3 обозначены: 5 — изделие; N, S — полюса магнита 1, В — направление магнитного поля; J2, J3, J4 — направления вихревых токов в поверхностном слое изделия 5 от, соответственно, катушек 2, 3 и 4; FЛ2, FЛ3, FЛ4 — направления действия сил Лоренца.
Электромагнитно-акустический преобразователь работает следующим образом. Для возбуждения поперечной волны он имеет магнитную систему с постоянным магнитом 1 цилиндрического типа, обеспечивающую магнитный поток по нормали к поверхности изделия 5, и индуктор виде трех катушек 2, 3 и 4 в форме меандра, причем витки плоских катушек расположены под углом 120° по отношению друг к другу. В результате взаимодействия наведенного вихревого тока J2 от катушки 2 и магнитного поля В в поверхностном слое материала изделия 5 возникают силы Лоренца FЛ2, направленные нормально по отношению к линиям вихревого тока J2. При этом образуется поперечная волна с плоскостью поляризации, совпадающей с плоскостью действия силы Лоренца FЛ2. Для возбуждения волны с другой поляризацией на катушку 3 подается напряжение, в результате чего в поверхностном слое материала изделия 5 возникают вихревые токи J3, которые при взаимодействии с магнитным полем В образуют силу Лоренца FЛ3, которая направлена нормально по отношению к линиям вихревого тока J3. При этом образуется поперечная волна с плоскостью поляризации, совпадающей с плоскостью действия силы Лоренца FЛ3. Для возбуждения волны с третьей поляризацией на катушку 4 подается напряжение, в результате чего в поверхностном слое материала изделия 5 возникают вихревые токи J4, которые при взаимодействии с магнитным полем В образуют силу Лоренца FЛ4, которая направлена нормально по отношению к линиям вихревого тока J4. При этом образуется поперечная волна с плоскостью поляризации, совпадающей с плоскостью действия силы Лоренца FЛ4.
Прием ультразвуковых колебаний, прошедших через изделие 5 и отразившихся от его противоположной поверхности, происходит по обратному ЭМА-преобразованию, т.е. преобразованию акустических колебаний металла, находящегося в постоянном магнитном поле, в электрические сигналы.
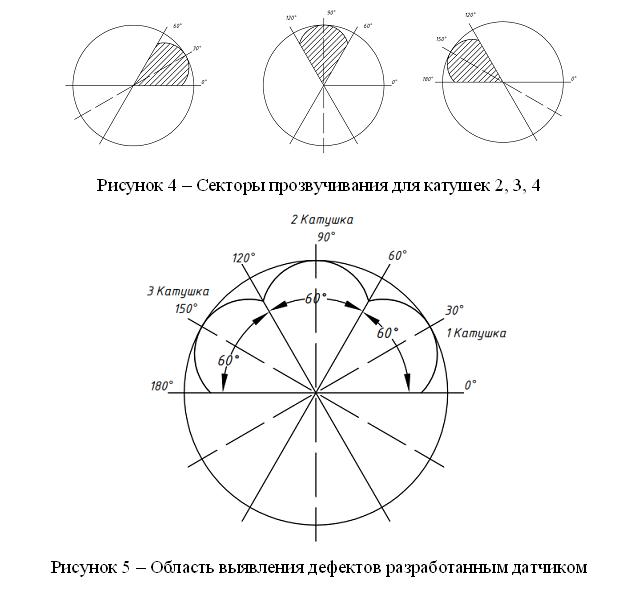
Попеременная подача напряжения на катушки 2, 3 и 4 приводит к возбуждению поперечных волн с разными поляризациями и выявлению дефектов в трех различных секторах прозвучивания, схематически изображенных на рисунке 4. Это позволяет избежать поворота электромагнитно-акустического преобразователя вокруг своей оси, что вызывает изменение позиционирования электромагнитно-акустического преобразователя относительно изделия 5. Таким образом, одним электромагнитно-акустическим преобразователем можно возбуждать волны трех различных поляризаций, а, следовательно, повысить выявляемость разноориентированных дефектов (рисунок 5).
Список использованных источников
- Канторович В.М., Глуцюк А.М. Преобразование звуковых и электромагнитных волн на границе проводника в магнитном поле // ЖЭТФ. – 1961.- Т. 41.- С. 1195.
- Канторович В.М., Тищенко H.A. Преобразование звуковых и электромагнитных волн на границе упругого проводника в магнитном поле// Изв. ВУЗов. Радиофизика. – 1963.- Т. 6, Вып. 1.- С.24-36.
- Канторович В.М. Увлечение кристаллической решетки электронами проводимости и соотношения Онсагера между электроакустическими коэффициентами // ЖЭТФ. – 1970.- Т.59, вып.6(12).- С.2116-2129.
- Неразрушающий контроль и диагностика: Справочник/ В.В. Клюев, Ф.Р. Соснин, А.В. Ковалев и др.; Под ред. В.В. Клюева. – 3-е изд. Испр. и доп.-М.: Машиностроение, 2003, — 656 с.
- Сучков Г.М. Современные возможности ЭМА дефектоскопии. – «Дефектоскопия». 2005. № 12. С. 24-39.[schema type=»book» name=»Технология выявления разноориентированных дефектов в металлических конструкциях, выполненных из углеродистой стали, при помощи технологии, основанной на возбуждении ультразвуковых волн электромагнитно-акустическим способом» description=»В статье рассматривается подход к выявлению дефектов, ориентированных произвольно в плоскости, параллельной поверхности ввода ультразвуковых волн в металл, основанный на применении специального электромагнитно-акустического преобразователя, возбуждающего в контролируемом объекте горизонтально-поляризованные сдвиговые ультразвуковые колебания.» author=»Григорьев Михаил Владимирович, Прилуцкий Максим Андреевич, Максутов Ленар Рауфович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-27″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.04.2015_4(13)» ebook=»yes» ]