
1.Терминология
Академик А.Н. Колмогоров полагает [2], что моделирование способов организации (как сети информационных процессов действий, приводящих к ожидаемым результатам) материальных систем (включая биологические) заключается в применении других материальных элементов (и необходимых алгоритмов функционирования и адекватных элементов структур) с целью создания новых систем с подобной организацией (и их способов) по существу, что и оригинальная система. Поэтому, по его мнению, достаточно полная модель Живой Системы должна называться Живой Системой, а достаточно полная модель Мыслящей Системы должна называться Мыслящей Системой.
2.Некоторые особенности Мыслящих Систем
В целом известно, что любая smart systеm использует принцип выбора (методом перебора) необходимого решения или алгоритма действия из ограниченного их списка, заранее созданного человеком. Процедура принятия решения Мыслящими Системами производится иначе.
По мнению многих психологов, каждый нормальный человек стремится предвидеть смысл предстоящих его действий с ожидаемыми результатами, иначе его жизнь может оказаться бессмысленной.
Поэтому в Мыслящих Системах как специальных системах моделирования информационных процессов принятия решений в различных, в том числе неопределенных ситуациях, не применяются заранее подготовленные ограниченные списки готовых решений с методом их перебора, а используются следующие функции, реализуемые в автономном режиме на семантическом уровне (в нашем случае):
— детерминирование внешней среды с ее моделированием,
— когнитивный анализ созданной модели внешней среды,
— оценка модели внешней среды методом сравнения с моделью решаемой задачи на параметрическом уровне с классификацией их отклонений,
-прогнозирование результатов виртуальных действий рассматриваемых решений с возможным применением процессов самоорганизации (при отрицательных результатах прогноза),
— генерация адекватных решений и алгоритмов действий с применением процессов самопрограммирования.
3.О проекте “Искусственная “разумная” рука “
В качестве примера следует привести проект “Искусственная “разумная” рука” [3,4,5,6], одна из особенностей которого связана с созданием, анализом и управлением различными физическими ситуациями в системе “К– О” (в качестве обратной связи) посредством моделирования пространственного осязания руки человека на семантическом уровне при обеспечении надежного захвата неориентированных объектов сложных форм (актуальной и нерешенной проблеме в манипуляционной робототехнике и протезостроении).
Основная причина существования этой проблемы связана со сложностью управления указанными физическими ситуациями в условиях отсутствия проекций активных сил и моментов во множестве новых точек контакта захватного устройства (до отрыва любого объекта от исходной позиции), и обязательного появления этих сил, а также и других пассивных сил в этих точках контакта позднее в процессе манипулирования объектом по причине действия объективных физических законов на нашей планете (физическая проблема).
Это генерирует парадоксальную ситуацию, когда решение о захвате любого объекта роботом или человеком принимается в одних исходных физических условиях, а реализация принятого решения происходит в других физических условиях.
Поэтому и сегодня манипуляционные возможности любого робота, связанные с захватом объекта, могут быть успешно реализованы исключительно в пределах узких границ детерминированной среды, заранее созданной или осознанной человеком, что лишает робототехнику автономности в естественных неопределенных условиях.
3.1 О кардинальном решении проблемы в манипуляционной робототехнике и протезостроении
Техническое решение [1,3,4,5,6] упомянутой проблемы основано на моделировании единственного кардинального решения, реализованного Природой на руке человека, и связано с применением целенаправленно формализованных междисциплинарных знаний и результатов эксперимента по выявлению функциональных принципов двигательного акта руки человека в аналогичных условиях.
Дополнительные трудности поиска кардинального решения упомянутой проблемы были связаны с известным фактом, что множество информационных процессов принятия решений человеком проходит на уровне подсознания (психологическая проблема).
Это решение содержит детерминирование физических ситуаций в системе “К-О” с их моделированием и когнитивным анализом, а также геометризацию этих ситуаций, что обеспечивает возможность перевода исходной информации из ее “закрытого” статуса для нашего сознания в “открытый” статус. (Фиг.1).
В процессе пассивной адаптации захватного устройства к формам и исходной позициям объектов каждая новая точка способна генерировать собственный квант (группу) внутренних отношений точек контакта.
В свою очередь каждое отношение точек контакта ассоциируется с собственным сектором виртуальных закрепощений перемещений центра массы объекта, а их совокупность выражается в виде образа закрепощений виртуальных перемещений — образ F.V.D.O (Фиг.1.).
Кардинальное Решение базируется также на применении семиотической структуре отношений контактных точек как симбиозе информациологии, раскрывающей геометрический мульти-агентный ракурс неизвестной исходной физической ситуации, и семиотики, раскрывающей ее смысл.
Последующие количественные и качественные оценки упомянутых физических ситуаций с прогнозированием надежности захвата являются базисом для принятия адекватного решения о захвате неориентированных объектов (до отрыва объекта от исходной позиции).
А применение внутреннего образного языка с целью интеллектуализации многоуровневых информационных процессов (по приему, обработке, хранению и передаче информации) в системе “К-О” обеспечивает семантическую выразительность как этих процессов, так и параметров принятых решений c возможностью наделения их эндофизическими свойствами.
Достигнутая аналогия структур “внутреннего слова” этого образного языка с “внутренним словом” языка человека является подтверждением подобия или идентичности принятого способа организации информационных процессов детерминирования, прогнозирования с принятием решений на данном уровне и с обеспечением возможности управления физическими ситуациями в системе “Кисть- Объект”(при отрицательном прогнозе надежности захвата).
Некоторые функциональные принципы двигательного акта руки человека в неопределенных начальных условиях одновременно с упомянутым единством структур “внутреннего слова” технического образного языка и “ внутреннего слова“ естественного языка человека являются объектами моделирования методов организации информационных процессов при поиске кардинального решения .
Адекватность принятого решения оценивается результатами прогнозов виртуальных действий.
Успешное моделирование целесообразных функциональных принципов двигательного акта руки человека [6], в нашем случае, может быть принято за критерий достижения адекватного функционального паритета между техническими системами и их биологическими прототипами в пределах границ общего класса решаемых задач.
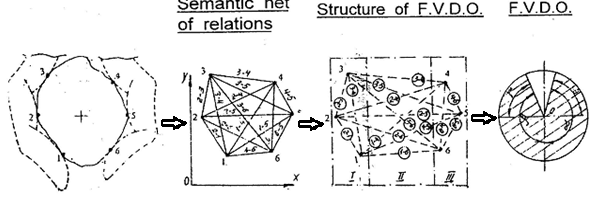
Фиг.1 Стадии бионического подхода по моделированию способа организации Мыслящих Систем (в нашем случае)
На Фиг.1. в качестве примера представлены как стадии бионического подхода по формированию, в частности, образа F.V.D.O, так и графические изображения упомянутых отношений точек контакта между объектом и адаптивным захватным устройством робота (1-2, — 1-6) до отрыва объекта от в исходного положения.
3.2 Некоторые принципы создания Технических Мыслящих Систем (на приведенном примере)
1.Принцип совместимости векторов активных сил с векторами переменной жесткости механизма адаптивного захватного устройства.
- Принцип подобия структур языков (робота и человека) на основе применения моделирования метода организации мыслительных процессов человека для интеллектуализации информационных процессов робота.
- Принцип прогнозирования надежности захвата неориентированных объектов сложных форм как степени достижения устойчивого равновесия всех сил и моментов в системе “К-О”.
- Принцип автономности для обеспечения детерминирования физических ситуаций в системе “К-О” с проведением их системного анализа.
- Принцип самоорганизации робототехники на структурном уровне для обеспечения поиска и принятия решений в случае отрицательного прогноза надежности захвата.
4. Домашний робот “Кубик”
Другим примером Мыслительных Систем является домашний робот “Кубик” (Россия) [7], который лишен всех ног и рук, но способен оказать своему владельцу необходимую информационную поддержку.
Этот робот может понимать и использовать вербальную (устную) речь человека (русский и английский языки) в интерактивном режиме и является, в сущности, ассистентом, секретарем, консультантом и тренером.
Робот успешно выполняет роль умного собеседника с применением юмора, афоризмов, способен поддерживать беседу, громко читать последние новости и актуальную информацию, участвовать в постановке новых задач и в поиске их решений, выполнять техническое управление различными системами удаленных “умных” домов и офисов.
В целом он способен обеспечить внешнюю информационную поддержку с психологическими и организационными аспектами любому человеку в условиях дефицита свободного времени, дефицита мотивации, недостатков воли и сил для принятия адекватных решений.
Заключение
Особый интерес представляют перспективы группового применения манипуляционных роботов на основе их интеллектуализации с использованием принципов и методологии Мыслящих Систем и Интернет — технологий для, например, дистанционного управления как строительством уникальных сооружений в труднодоступных и опасных для человека местах, так и разминированием территорий и водного пространства, освоением космоса и т.д., и функционирующих на автономном уровне при выполнении заданий в недетерминированной и опасной естественной среде.
Это становится возможным благодаря их указанным способностям детерминировать физические ситуации в системе “Кисть–Объект” и прогнозировать надежность захвата неориентированных объектов сложных форм в автономном режиме аналогично вынужденной, постоянной и бессознательной деятельности человека.
Упомянутое стимулирует в ближайшей перспективе как масштабные замещения работающего человека манипуляционной робототехникой в естественных недетерминированных средах, так и совершенствование самой робототехники, и создание интеллектуальных протезов для инвалидов, что, в свою очередь, генерирует аналогию с активной ролью руки человека в материальной и духовной сферах как шагов на пути эволюционных процессов нашей Цивилизации и самого Человечества.
В результате предоставляются следующие возможности:
- Упомянутое широкомасштабное вторжение манипуляционной робототехники в те неблагоприятные и недоступные области трудовой деятельности человека, где ранее применение манипуляционной робототехники было невозможным по упомянутым выше причинам.
- Предоставление дополнительного свободного времени любому человеку для выбора и реализации:
- дополнительной физической и умственной работы, бизнеса,
- физического и умственного самосовершенствования,
- самообразования,
- отдыха.
Синтез моделей различных целесообразных функциональных возможностей человека в едином проекте является одним из важнейших направлений развития Мыслящих Систем в будущем.
Поэтому вышеуказанное стимулирует возможность появления одного из начал нового шага прогресса нашей Цивилизации.
Следует также отметить, что использование методологии Современной Теории Катастроф [8] открывает возможность оценки перспектив масштабного применения любых технических систем, включая Мыслящих Систем, с возможным определением «скачка» динамических моделей катастроф в качестве «обратной» связи их применения в нашей Цивилизации.
Концентрация интеллектуальных и материальных ресурсов нашей Цивилизации на развитии творчества будущих поколений человечества с целью их совершенствования с применением процессов самопознания, самооценки и этического императива, позволит, наконец, покончить с его многими негативными пороками, в т.ч. преодолеть пороги эгоистического мышления, материального накопительства, потребительского мышления, кастовых отношений.
Это позволит, в конечном итоге, перейти к созданию условий по реализации мечты о космических Эрах, включая перспективы достижения состояния “лучистого человечества“ в условиях возможных космических угроз, в чем создаваемые сегодня разнообразные технические “мыслящие” и “умные” системы будут нашими разумными помощниками в будущих, в т.ч. заранее непредвиденных ситуациях.
Список литературы
- I.Timofeev, V.A. Dmitrieva. The system of decision taking in indeterminate situations. B.S. Laboratory – 2nd International Symposium “ Systems Thinking for a Systainable Economy”, Universitas Mercatorum, Rome, Italy. 23-24 January, 2014
- Колгоморов А.Н. Жизнь и мышление как особые формы существования материи. Из сборника “О сущности жизни”, М, Наука, 1964, c.52.
- Tимофеев А.И. Семиотическая основа процессов прогнозирования в неопределенных условиях. Материалы Десятой национальной конференции по искусственному интеллекту. 25-28 сент. Обнинск. Физматлит.2006.
- Timofeev. Artificial intellectual hand: Capture reliability prognosis of non-oriented complex shape objects for manipulating robotics. EMCSR 2012 — European Meeting on Cybernetics and Systems Research, University of Vienna, Austria, 10-13 of April, 2012.
- А.Timofeef, V.Dmitrieva. Civilization and technological thinking systems. 9Th Congress of the UES-EUS. Globalization and Crisis. Complexity and Govermance of systems. Universitat Valencia, Spain, 15-16 October, 2014.
- Anatoly Timofeev. Civilization and Technical Thinking Systems. ISBN 978-3-659-67185-2, LAMBERT Academic Publishing, Germany, 2015, 42p.
- cubicrobotics.ru
- Нечаев Ю.И. Философские аспекты реализации проблем Современной Теории Катастроф в интегрированной динамической среде. Искусственный интеллект. ISSR 1561-5359, 2013 №3 (61), Национальная академия наук Украины, Донецк, 2013, c. 6-18,.
- Irina Ezhkova. Self-organizating representations. Cybernetics and systems, An International Journal, Taylor, Francis Inc., 2005, 36, 861-875.
- Савельев С.В. Происхождение мозга. Москва, Веси, 2005.[schema type=»book» name=»ТЕХНИЧЕСКИЕ МЫСЛЯЩИЕ СИСТЕМЫ НА ПОРОГЕ НАШЕГО ОБЩЕСТВА» description=»Новый класс технических интеллектуальных систем появился в последнее время на пороге нашего общества – Технические Мыслящие Системы (Technical Thinking Systems) . На мировой арене этому явлению уделяется большое внимание, включая проведение специальных научных конференций [1] с презентацией инновационных проектов и разнообразием smart systеm — “умных” систем, “умных” домов, “умных” улиц, “умных” городов будущего, дискуссий о ролях этих систем в естественных и экстремальных условиях, компьютерных науках, педагогике, требованиях к жителям “умных” городов, проблемах моделирования в Мыслящих Системах и т.д. Основная особенность приведенного примера Мыслящих Систем (проекта “Искусственная “разумная” рука”) – это присутствие обратной связи в виде моделей физических ситуаций в системе “Кисть-Объект” (“К-О”) посредством моделирования способа организации функциональной системы человека – системы захвата, включая пространственное осязание руки человека. Кардинальное решение актуальной и нерешенной проблемы в манипуляционной робототехнике – надежность захвата неориентированных объектов сложных объектов — базируется на применении семиотической структуры отношений контактных точек, как симбиозе информациологии, раскрывающей геометрический мульти-агентный ракурс неизвестной исходной физической ситуации, и семиотики, раскрывающей ее смысл, а так же с применением целенаправленно формализованных междисциплинарных знаний и результатов экспериментов по изысканию функциональных принципов двигательного акта руки человека в аналогичных условиях. Применение принципов и методологии Мыслящих Систем предоставит возможность широкомасштабного внедрения манипуляционной робототехники и интеллектуальных протезов в недоступных ранее областях трудовой деятельности человека.» author=»Тимофеев Анатолий Иванович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-02-07″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_29.08.15_08(17)» ebook=»yes» ]