
Введение
Задача синтеза систем автоматического управления (САУ) воздушного судна (ВС), как нелинейных объектов остается актуальной. Большинство применяемых на практике подходов теории управления опираются на линеаризованные математические модели ВС, что адекватно большинству режимов полета. Однако на некоторых режимах полета такая подмена недопустима ввиду существенного отличия свойств реального объекта от его математического аналога.
Одним из методов, позволяющим выполнить синтез системы управления для нелинейных объектов является метод, основанный на концепции обратных задач динамики (ОЗД), глубоко разработанный П.Д. Крутько и другими видными учеными нашей страны.
Сущность обратной задачи динамики сводится к нахождению управляющих сил и моментов, под действием которых объект будет двигаться по назначенной траектории. Утверждается, что использование методов ОЗД позволяет осуществить синтез САУ для нелинейных объектов и при этом синтезированный закон управления является оптимальным в смысле реализации заданной траектории движения объекта [3, с.207]. Кроме того, постольку, поскольку синтез ЗУ САУ методом ОЗД опирается на продувочные характеристики модели ВС, САУ становится адаптивной к изменяемым свойствам ВС.
Для выполнения синтеза САУ указанным способом применяется математическая модель пространственного движения ВС. Основой математической модели (ММ), как и для большинства технических задач является модель ВС, как абсолютно твердого тела. Вид ММ ВС приведен во многих научных и учебных изданиях и не целесообразно описывать ее в данной статье. Отметим, что при этом применены стандартные допущения, упрощающие, схематизирующие реальный процесс.
ММ ВС включает динамические уравнения поступательного и вращательного движений ВС в связанной СК, кинематические соотношения между параметрами поступательного и вращательного движений, уравнения связей между параметрами ВС, аэродинамические силы и моменты, выраженные через безразмерные аэродинамические коэффициенты [1, 2].
В пространстве состояний уравнение движения ВС, как твердого тела описывается дифференциальной системой
Для контура вращательного движения входными параметрами являются эталонные и текущие значения угловых скоростей и параметры углового положения ВС. Выходными величинами для этого контура являются угловые отклонения рулевых поверхностей. Для контура траекторного управления входными величинами являются выходные параметры контура вращения, начальные значения траекторных параметров. Выходными величинами являются координаты пространственного движения ВС. Для реализации контуров управления требуются измерители угловых скоростей ДУС, измерители координат (акселерометры), измерители углового поля (ГВ, КС), измерители скорости, измерители сдвига ветра.
Исследование функционирования контуров управления осуществлялось путем численного моделирования контура вращательного движения с использованием программы MatCad. При этом была выбрана эталонная модель движения ВС, соответствующая динамическим свойствам маломаневренного ВС. Моделирование проводилось при различных значениях коэффициентов передачи контура управления угловой скорости, что соответствовало различным режимам полета. При всех выбранных значениях коэффициентов система оставалась устойчивой. При больших значениях коэффициента время сходимости было наименьшим. Таким образом, построение САУ по предложенному принципу является перспективным.

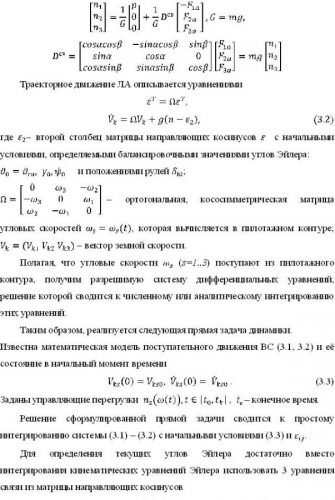

Рисунок 3.1. Структура организации контуров управления нелинейной САУ
Список литературы
- Буков В. Н., Сизых В. Н. Метод и алгоритмы решения сингулярно-вырожденных задач аналитического конструирования регуляторов //Изв. АН. Теория и системы управления. М.: 2001, №5. С.43-61.
- Красовский А. А. Системы автоматического управления полетом и их аналитическое конструирование. М.: Наука, 1973. – 240 с.
- Крутько П.Д. Обратные задачи динамики управляемых систем. Нелинейные модели. – М.: Наука, Гл. ред. физ.–мат. лит., 1988.– 328 с.
- Крутько П. Д. Обратные задачи динамики в теории автоматического управления. М.: Машиностроение, 2004. – 576с.[schema type=»book» name=»СИНТЕЗ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУШНОГО СУДНА МЕТОДОМ ОБРАТНЫХ ЗАДАЧ ДИНАМИКИ» author=»Диль Виктор Фридрихович, Сизых Виктор Николаевич » publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-06-14″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.12.2014_12(09)» ebook=»yes» ]