
Эффективность авиационных комплексов в значительной степени определяются возможностями бортового оборудования воздушных судов (ВС). Современные тенденции повышения качества авиационных перевозок связаны, в том числе, с усовершенствованием пилотажно-навигационного комплекса (ПНК) [1, 2, 8, 11].
Инерциальная навигационная система (ИНС) является информационным ядром в составе ПНК на борту ВС. Однако, применение автономного режима функционирования ИНС не обеспечивает требуемой точности маршрутного полета ВС. Это связанно с тем, что ошибка определения координат в зависимости от типа ИНС составляет от 1,5 до 8 км за час работы и нарастает пропорционально времени автономного функционирования [10].
Перспективным методом создания высокоточной ИНС, использующей гироскопы среднего класса точности является автокомпенсация погрешностей чувствительных элементов. Особый интерес вызывает метод пространственной модуляции погрешностей измерителей ИНС, который может быть реализован путем управления пространственным положением блока чувствительных элементов (БЧЭ) [6, 9, 10, 12].
Наличие возмущающих воздействий, влияние которых увеличивается в результате управления пространственным положением БЧЭ, приводит к тому, что существует область значений данных воздействий, в которой применение вращения в качестве компенсации погрешностей ИНС будет неэффективным. К таковым воздействиям относится ошибка масштабных коэффициентов гироскопов . Ее вклад в суммарную ошибку лазерного гироскопа составляет приблизительно 20%. Современным гироскопам присуща нестабильность ошибки масштабного коэффициента в пределах от до в течение 5 лет эксплуатации. Кроме того дрейф гироскопов увеличивается на за год эксплуатации и дает достаточно большой вклад в суммарную ошибку всей системы.
Поиск оптимальной программы управления пространственным положением блока чувствительных элементов является сложной и натыкается на сложно преодолимую проблему большой размерности задачи («проклятие размерности»). Однако задача поиска оптимального управления может быть решена, если её перевести из области функционального пространства в область параметрического пространства [9]. Проведенные исследования ИНС с вращающимся блоком чувствительных элементов позволяют заключить, что программа вращения является периодической функцией времени и может быть представлена в виде разложения в многочлен:
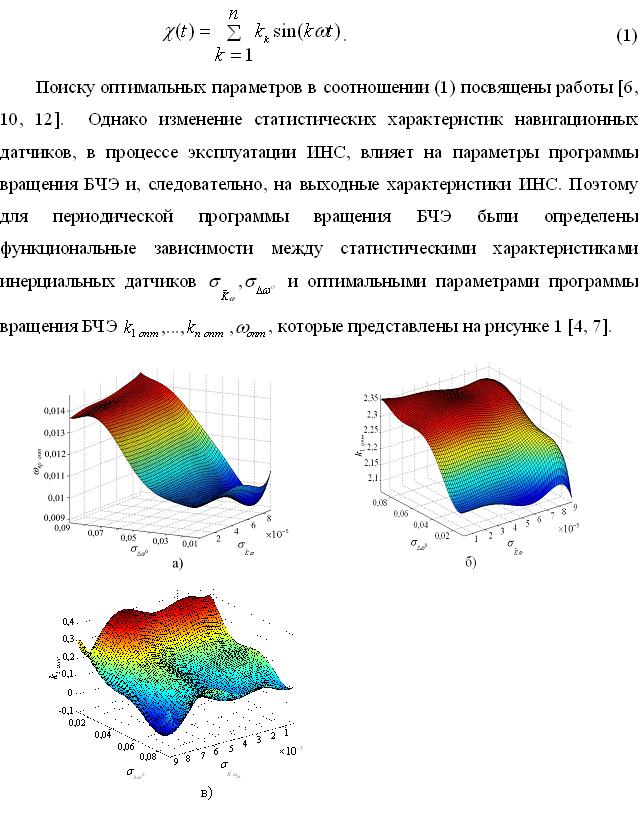
Рисунок 1.
На основании полученных зависимостей был разработан алгоритм коррекции параметров программы вращения БЧЭ, который позволяет повысить точность ИНС.
Структура устройства, реализующего предлагаемый метод коррекции параметров закона управления блоком чувствительных элементов, определена и представлена на рисунке 2.
Новизна данного технического решения подтверждена патентами на изобретение [5].
ИНС с управляемым блоком чувствительных элементов функционирует следующим образом:
блок чувствительных элементов (БЧЭ) состоит из блока лазерных гироскопов (БЛГ), блока акселерометров (БА) и закреплен на механизме вращения (МВ).
Блок электроники и интерфейсов (БЭ) представляет собой устройство, которое выдает электрический сигнал на двигатель механизма вращения БЧЭ (МВ), а также играет роль связующего устройства между блоком лазерных гироскопов, блоком акселерометров и цифровым микропроцессором (ЦМ).
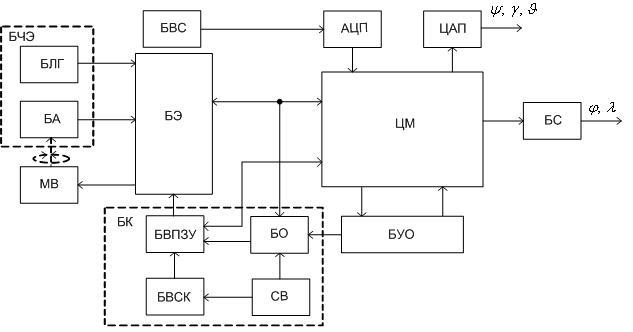
Рисунок 2. ИНС с управляемым блоком чувствительных элементов
Блок сопряжения с навигационной информацией (БС) предназначен для преобразования сигналов с выхода цифрового микропроцессора (ЦМ) в цифровой код шины навигационной информации ().
Блок коррекции (БК), состоящий из счетчика времени (СВ), блока определения погрешностей лазерных гироскопов (БО), блока выдачи сигнала коррекции (БВСК), блока выдачи параметров закона управления (БВПЗУ), выдает в блок электроники и интерфейсов (БЭ) оптимальные параметры закона управления БЧЭ в зависимости от изменения статистических характеристик блока лазерных гироскопов (БЛГ). В блок коррекции (БК) данные о начальных значениях инструментальных погрешностей лазерных гироскопов поступают от блока управления и отображения информации (БУО).
Блок выдачи параметров закона управления (БВПЗУ) вычисляет и выдает в блок электроники и интерфейсов (БЭ) оптимальные параметры закона управления БЧЭ.
На основании данных о текущих значениях инструментальных погрешностей лазерных гироскопов, поступающих из блока определения погрешностей лазерных гироскопов (БО), сигнала с блока выдачи сигнала коррекции (БВСК) в блоке выдачи параметров закона управления (БВПЗУ) определяются оптимальные параметры закона управления БЧЭ, а затем поступают в блок электроники и интерфейсов (БЭ). Сигнал о начале коррекции формируется в алгоритме функционирования блока выдачи сигнала коррекции (БВСК) с учетом сигнала поступающего от счетчика времени (СЧ).
Сигнал с оптимальными параметрами закона управления с блока электроники БЧЭ и интерфейсов (БЭ) поступает на двигатель механизма вращения (МВ).
Сигналы, пропорциональные угловой скорости и ускорению ВС с БЧЭ, через блок электроники БЧЭ и интерфейсов (БЭ) поступают в цифровой микропроцессор (ЦМ).
В цифровом микропроцессоре (ЦМ) происходит вычисление углов ориентации, которые при помощи цифро-аналогового преобразователя (ЦАП) выдаются потребителям. Навигационные параметры вычисляются в цифровом микропроцессоре (ЦМ) и через блок сопряжения с навигационной информацией (БС) поступают в шину навигационной информации (). Данные вычисления происходят с учетом информации от вычислителя скорости (БВС), которая поступает в цифровой микропроцессор (ЦМ) через аналогово-цифровой преобразователь (АЦП). Визуализация навигационной информации и углов ориентации осуществляется через блок управления и отображения информации (БУО).
С целью установления погрешности определения навигационных параметров разработанной системой было выполнено имитационное моделирование [3, 4, 7]. Оно проводилось для следующих условий:
1) Инструментальные погрешности ИНС с автокомпенсацией соответствуют начальному периоду эксплуатации системы и принимались равными: дрейф гироскопов — 0,01град/ч, ошибка масштабных коэффициентов — . Параметры программы вращения БЧЭ оптимальные.
2) Инструментальные погрешности ИНС с автокомпенсацией увеличены пропорционально пятилетнему сроку эксплуатации системы: дрейф гироскопов — 0,03 град/ч, ошибка масштабных коэффициентов — . Параметры программы вращения БЧЭ оставлены без изменений.
3) Инструментальные погрешности ИНС с автокомпенсацией приняты следующими: дрейф гироскопов — 0,03 град/ч, ошибка масштабных коэффициентов — . Параметры программы вращения БЧЭ оптимизированы для указанных статистических характеристик гироскопов.
Полученные по результатам моделирования ошибки определения координат и азимутального угла представлены в таблице.
Таблица 1
Предельные круговые ошибки (3σ) определения навигационных параметров
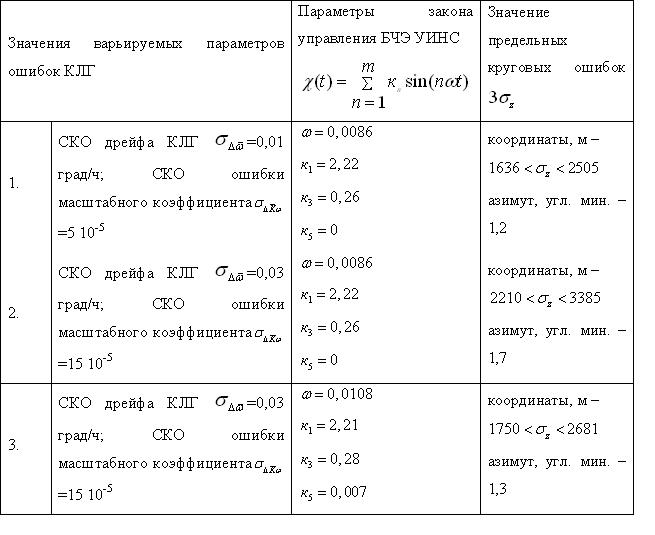
Применение автокоррекции программы вращения БЧЭ позволило снизить исправленное значение среднеквадратических круговых ошибок автономной ИНС за час полета с 2798 м (ИНС без коррекции) до 2216 м., что на 25% меньше аналогичных ошибок ИНС без коррекции.
Cписок литературы:
- Бражнев С.М., Шепеть И.П. Методика оценки навигационных свойств геофизических полей // Инновационные направления развития в образовании, экономике, технике и технологиях: сб. трудов Междунар. науч.-практ. конф. (Ставрополь, 20-21 мая 2014 г.). Ставрополь: ТИС (филиал) ДГТУ, 2014. С. 118-121.
- Губарь М.Н., Лопаткин Д.В., Ипполитов С.В., Шепеть И.П. Перспективные направления развития бортового оборудования летательного аппарата, обеспечивающего маловысотный полет // Инновационные направления развития в образовании, экономике, технике и технологиях: сб. трудов Междунар. науч.-практ. конф. (Ставрополь, 20-21 мая 2014 г.). Ставрополь: ТИС (филиал) ДГТУ, 2014. С. 133-136.
- Литвин Д.Б., Шепеть И.П. Способ решения дифференциальных уравнений // Аграрная наука, творчество, рост: сб. трудов IV Междунар. науч.-практ. конф. (Ставрополь, 10-14 февраля 2014 г.). Ставрополь: СтГАУ., 2014. С. 232-234.
- Литвин Д.Б., Гулай Т.А., Долгополова А.Ф., Шепеть И.П., Протасов К.А. Декомпозиция системы линейных дифференциальных уравнений // Финансово-экономические и учетно-аналитические проблемы развития региона: сб. трудов 78-й научно-практической конференции. Ставрополь: СтГАУ., 2014. С. 237-241.
- Пат. 2362977 Российская Федерация, МПК G01C21/10. Способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления / Шепеть И.П., Онуфриенко В.В., Иванов М.Н., Бондаренко Д.В., Захарин А.В., Слесаренок С.В., Иванов И.М., Кучевский С.В., Коваленко В.Ф., Кучевский К.В., заявитель и патентообладатель авторы изобретения – № 2008121099/28,. заявл. 26.05.2008, опубл. 27.07.2009, Бюл. № 21 – 9 с. : ил.
- Шепеть И.П., Бражнев С.М., Литвин Д.Б., Алабанов А.Б., Литвина Е.Д. Оценка возможности применения пространственной модуляции погрешностей измерительных элементов в информационно-управляющих системах // НаукаПарк. 2014. № 2/2 (22) март-апрель. С. 15-18.
- Шепеть И.П., Бражнев С.М., Литвин Д.Б., Литвина Е.Д., Протасов К.А. Решение систем алгебраических уравнений в среде MATLAB // Инновационные направления развития в образовании, экономике, технике и технологиях: сб. трудов Междунар. науч.-практ. конф. (Ставрополь, 20-21 мая 2014 г.). Ставрополь: ТИС (филиал) ДГТУ, 2014. С. 158-162.
- Шепеть И.П., Бражнев С.М., Литвин Д.Б., Балабанов А.Б., Литвина Е.Д. Разработка условного алгоритма контроля и диагностирования информационно-измерительных систем // НаукаПарк. 2014. № 2/2 (22) март-апрель. С. 19-22.
- Шепеть И.П., Варнавский А.А. Дуальное управление по неполной информации в информационно-измерительных системах // НаукаПарк. 2013. № 6 (16). С. 113-117.
- Шепеть И. П., Напольский В. П. Метод повышения точности измерения векторных параметров в автономных инерциальных навигационных системах летательных аппаратов // Известия высших учебных заведений. Северо-Кавказский регион. Серия: Технические науки. 2007. N 5. С. 10-11.
- Система контроля условий транспортировки ценных грузов / Литвин Д.Б., Шепеть И.П., Бражнев С.М., Протасов К.А., Литвина Е.Д. // Экономические, инновационные и информационные проблемы развития региона: сб. трудов Междунар. науч.-практ. конф. (Ставрополь, 15-16 апреля 2014 г.) / СтГАУ. Ставрополь, 2014. С. 184-186.
- Шепеть И.П., Хабаров А.Н., Гривенная Н.В., Сербин Е.М., Чернавина Т.В. Автономная компенсация случайных возмущений в инерциальных навигационных системах // Труды международного симпозиума Надежность и качество. Пенза: Из-во Пенз. гос. ун-та, 2014. Том 2. С. 232-234.[schema type=»book» name=»МЕТОД ПОВЫШЕНИЯ ТОЧНОСТИ СЧИСЛЕНИЯ КООРДИНАТ» author=»Шепеть Игорь Петрович, Чернавина Татьяна Валентиновна, Сербин Евгений Михайлович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-05-08″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 28.02.2015_02(11)» ebook=»yes» ]