
Навесные и самоходные погрузчики с поворотной стрелой отличаются большой универсальностью, компактностью имеют высокую производительность, универсальность, простоту и надежность управления.
Представителем этого типа погрузчиков, получившим наибольшее применение в различных отраслях промышленности является автономный погрузчик экскаваторного типа ПЭА-1,0.
Значительная доля повреждений элементов конструкции современных машин происходит вследствие напряжений, возникающих при колебаниях, возбуждаемых различными периодическими и внезапно приложенными нагрузками. Колебательные процессы имеют для навесного оборудования колесных погрузчиков особое значение, поскольку цикличность, нестационарные режимы нагружения, большое количество выполняемых технологических операций обуславливают высокую динамическую напряженность элементов конструкции.
Формирование нагрузочных режимов на стадии проектирования указанных погрузчиков является достаточно сложной задачей. При выполнении технологических операций в гидросистеме погрузчика возникают динамические процессы, которые не учитываются статическим расчетом, но создают дополнительные нагрузки, приводящие к аварийным ситуациям. Главное динамическое звено гидропривода — гидроцилиндры, с помощью которых оператор осуществляет управление навесным оборудованием погрузчика. Основные параметры, определяющие динамику гидропривода — приведенная масса навесного оборудования и груза, коэффициент вязкого трения и жесткость гидросистемы. Более подробно материалы данных исследований рассмотрены в работах [1,2,3,4] и др.
Величина приведенной массы является функцией веса груза и высоты положения грейферного захвата.
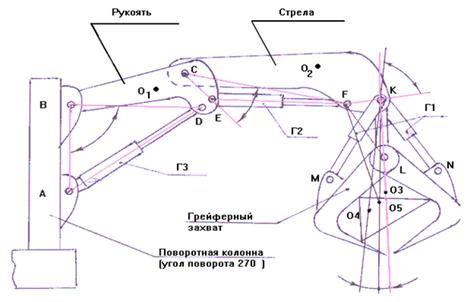
Для определения приведенной массы гидросистемы погрузчика рассмотрим кинематическую схему навесного оборудования колесного погрузчика (рис. 1). Поворотная колонна поворачивается на 270 градусов относительно своей вертикальной оси при помощи гидроцилиндра и реечного зацепления. К верхней части колонны шарнирно подсоединена рукоять. Подъем рукояти производится гидроцилиндром подъема (Г3). К рукояти шарнирно подсоединена стрела с гидроцилиндром Г2, который одновременно является гидроцилиндром излома шарнирно — сочлененной стрелы и гидроцилиндром поворота грейферной подвески (захвата). Створки захвата приводятся гидроцилиндрами Г1. Грейферная подвеска вместе с гидроцилиндрами захвата и грейфером вращается относительно центра вращения К под действием собственного веса и имеет центр тяжести захвата в точке О3.
Рисунок 1. Схема навесного оборудования колесного погрузчика.
Груз помещенный в захват имеет свой центр тяжести О4. Общий центр тяжести груза и захватного устройства О5 всегда будет находиться на вертикали, проходящей через центр вращения захвата К. Ось грейфера может разворачиваться в подвеске на 90 градусов, т.е. допускается переустановка захвата на продольное или поперечное расположение створок захвата. Для удобства расчета нагрузок в навесном оборудовании принимаем следующие обозначения:
АВ = l; ВD = r3; AD = S3; CE = l2; CF = r2; EF = S2; KF = l1;
KL = r1; FL = S1;
О1 — центр тяжести рукояти;
ВО1 = ro1 — радиус вращения центра тяжести рукояти относительно центра вращения рукояти В;
О2 — центр тяжести стрелы;
СО2 = ro2 — радиус вращения центра тяжести стрелы относительно центра вращения стрелы С;
О3 — центр тяжести захвата;
КО3 = rо3 — радиус вращения центра тяжести захвата относительно центра вращения захвата К.
О4 — центр тяжести груза;
КО4 = ro4 — радиус вращения центра тяжести груза относительно центра вращения захвата;
О5 — общий центр тяжести груза и захвата;
КО5 = rо5 — радиус вращения общего центра тяжести захвата и груза относительно центра вращения захвата К.
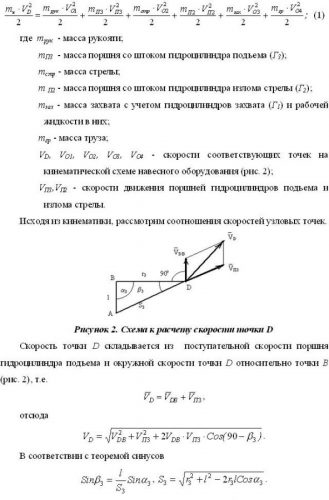
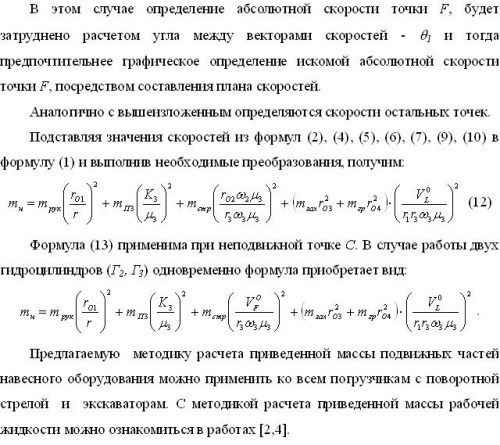
В общем виде формулу для определения приведенной массы к штоку гидроцилиндра подъема стрелы можно записать так:

 Список литературы
Список литературы
- Верхов Ю.И. Аналитический метод определения нагруженности навесного оборудования погрузчика ПЭА-1,0 / Ю.И. Верхов, А.А. Климов // Сборник научных трудов. — Красноярск: КрасГАУ, 2000. Часть 1.- С. 65-70.
- Климов А.А. Формирование нагрузочных режимов в навесном оборудовании колесных погрузчиков: автореф. дисс. … канд. техн. наук (05.02.02 – машиноведение и детали машин) / А.А. Климов – Красноярск, 2000. — 21 с.
- Верхов Ю.И. Динамические характеристики грузов в технологии работы погрузчика ПЭА-1,0 / Ю.И. Верхов, А.В. Стручков // Сборник научных трудов. — Красноярск: КрасГАУ, 2000. Часть 1.- С. 10-14.
- Климов А.А. Формирование нагрузочных режимов в навесном оборудовании колесных погрузчиков малой грузоподъемности. / А.А. Климов, В.А. Меновщиков, А.В. Стручков. — Красноярск: Изд-во КрасГАУ, 2013. — 170.с.[schema type=»book» name=»К ВОПРОСУ ВЫВОДА УРАВНЕНИЯ ДВИЖЕНИЯ ПРИВЕДЕННЫХ МАСС В ГИДРОСИСТЕМЕ ПОГРУЗЧИКА» author=»Климов Анатолий Александрович, Стручков Алексей Валентинович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-06-19″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.12.2014_12(09)» ebook=»yes» ]