
Рынок беспилотных летательных аппаратов (БЛА) — бурно растущий сегмент рынка авиатехники, в котором активно работают не только ведущие авиационные державы мира, но и многие развивающиеся страны. На основе беспилотных летательных аппаратов (БЛА) создаются комплексы для разведки и контроля местности и объектов, проведения видео-, фото- съемки, получения информации об излучении радиоэлектронных средств, дозиметрического контроля и другой информации в режиме реального масштаба времени с высоты «птичьего полета», транспортировки и сброса по команде оператора малогабаритных грузов в заданную точку. Одной из бурно развивающихся разновидностей БЛА являются мультикоптеры. В целом, мультикоптеры — весьма привлекательный своей универсальностью, экономичностью и простотой тип беспилотников, который в ближайшем будущем может потеснить на рынке БЛА традиционной вертолетной схемы.
В настоящее время подобные аппараты уже становятся неотъемлемым и востребованным «оружием» во многих подразделениях правоохранительных органов, спецназа, ГАИ, прокуратуры и МЧС, а также повседневным инструментом для средств массовой информации, фото-киноиндустрии и т.п.
«Перспектива в разработке САУ БПЛА заключается в создании «интеллектуальной» авионики, имеющей программное обеспечение, способное при отказах каких либо систем выбирать альтернативные алгоритмы управления для продолжения полета» [4, 85].
В связи с этим был разработан макетный образец системы управления курсовертикали на основе микромеханических датчиков для системы автоматического управления полётом беспилотного летательного аппарата (БПЛА) массой до 1 т, в качестве резервной системы ориентации. Актуальность данной работы обусловлена перспективностью и постоянно растущим спросом на БПЛА, в состав систем управления полётом которых входит, в частности, курсовертикаль.
Цель данной работы — разработка курсовертикали, способной выполнить задачу ориентации БПЛА в случае отказа основных навигационных систем.
Для достижения поставленной проблемы выполнены следующие задачи:
- Разработан макетный образец платы курсовертикаль.
- Определен порядок работы с датчиком для получения объективной информации в реальном масштабе времени и трансляции её на процессор вычислительного устройства.
- Установлено программное обеспечение и проведены стендовые испытания разработанного изделия с устранением выявленных ошибок.
- Проведено исследование разработанной системы, выявлены и устранены все недочеты.
На основании анализа проведённого в данной тематике, руководствуясь поставленным требованиям и опираясь на сделанные выводы, выберем аппаратную базу для курсовертикали.
Блок микромеханических гироскопов и акселерометров
Устройство состоит из трёхосевого микромеханического гироскопа и трёхосевого микромеханического акселерометра выполненных в едином корпусе устройства. Работа с устройством осуществляется по последовательному периферийному интерфейсу SPI в цифровом виде.
Вычислитель
В качестве устройства вычисления использовали микроконтроллер MMstm32F407 фирмы PROPOX. MMstm32F407 – универсальный мини-модуль представляет собой завершенную, готовую к использованию платформу на базе высокопроизводительного процессора ARM Cortex-M4F микроконтроллера STM32F407 с тактовой частотой до 168 МГц. Данный вычислитель основан на базе высокопроизводительного процессора Cortex-M4. Это встраиваемое процессорное ядро компания ARM представила в феврале 2010 года. Ядро разработано для систем, требующих простое в применении устройство, сочетающее функции управления и цифровой обработки сигнала. Благодаря высокоэффективной цифровой обработке сигнала, малому энергопотреблению, низкой стоимости и простоте применения микросхемы на основе подсемейства Cortex-M подходят под наши задачи наилучшим образом.
Магнитометр
Для вычисления магнитного курса использовали трёхосевой магнитометр Honeywell HMR2300r-422. Устройство выполнено в бескорпусном варианте, в виде платы с микросхемой датчика и стандартным последовательным портом RS422 для коммуникации с ним.
Алгоритм ориентации
Данный алгоритм составлен по материалам ОАО «Авионика».
Рассматриваемая курсовертикаль предполагает использование интегрирующих гироскопов и акселерометров. Точность гироскопов для высокодинамичных объектов, должна быть не хуже нескольких единиц градусов в час, а частота съёма информации с интегрирующих датчиков должна составлять 100-200 Гц.
В качестве параметров ориентации выбран кватернион, который пересчитывается в матрицу направляющих косинусов перехода инерциальной системы координат в связанную. Расчёт углов ориентации выполняется по матрице направляющих косинусов и приведён в шаге 10. Счисление параметров ориентации выполняется в прямоугольной системе координат (ИСК), начало которой выбирается в точке старта изделия, но может быть смещено.
Ориентация определяется относительно осей ИСК, поэтому углы, определяемые в БИНС, отличаются от углов относительно текущей плановой земной системы координат, но могут быть пересчитаны. Данное отличие не превышает одного градуса на каждый угол смещения ЛА по широте и долготе относительно начала координат ИСК. В алгоритм заложена сферическая модель параметров модели Земли. Считается, что она достаточно точно учитывает влияние ускорения земного притяжения, поэтому расчет широты и долготы текущего положения ЛА не требуется.
Счисление параметров ориентации выполняется по информации о малых конечных поворотах, получаемых от интегрирующих гироскопов и приращениях кажущейся скорости, получаемых от интегрирующих акселерометров.
«Источником такой информации служат датчики линейного ускорения (ДЛУ). Основные погрешности системы маятниковой коррекции возникают в результате действия постоянных или медленно меняющихся ускорений» [3, 154-155]. В алгоритме принято допущение о том, что изменение конечных поворотов и приращений кажущейся скорости на шагах съема информации с датчиков является линейным. В связи с этим алгоритм курсовертикали является двухшаговым, то есть для каждого шага решения алгоритма учитывается два шага съема информации с датчиков, что соответствует представлению процессов изменения малых поворотов и приращений кажущейся скорости на шагах решения алгоритма полиномами первого порядка. При этом обеспечивается счисление параметров ориентации с точностью до малых третьего порядка. Это означает, что при уменьшении шага дискретизации по времени вдвое, повышение точности алгоритма, в смысле уменьшения вносимых им ошибок за счет приближенности решения, возрастает примерно на порядок.
Разработанный блок курсовертикали имеет размеры 160мм. х 80мм. х 55мм. Данные размеры связаны с использованием блока курсовертикали на тестируемом оборудовании. Данный блок размешается в БПЛА, где место ограничено, он должен быть с наиболее минимальными размерами. Возможность работы с трёхосевыми микромеханическими датчиками ADIS16365, ADIS16488 и др. Диапазон рабочего напряжения: 6 ~ 23В. Энергопотребление 950мА при 12В входного напряжения. Диапазон рабочих температур блока курсовертикаль от 0°С до +60°С. Для быстрой отладки вычислителя MMstm32F407 сделаны разъемы в торце корпуса и дублирующие разъемы самой отладочной платы.
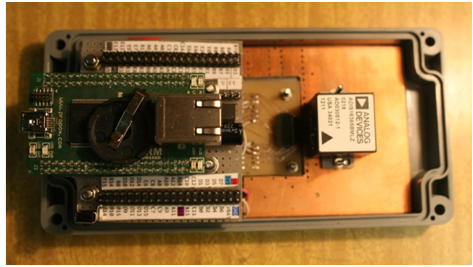
Рисунок 1. Блок гировертикали, вид сверху.
На данной фотографии блок гировертикали, но при использовании внешнего модуля магнитометра, устройство можно превратить в курсовертикаль.
Исследование курсовертикали и результаты
Были проведены лабораторные испытания готового изделия на поворотном столе. Цель эксперимента заключалось в том, чтобы убедиться, что устройство правильно отрабатывает заданные углы крена, тангажа, правильность показаний напряжения на датчике, во время испытаний.
Данные, которые мы получили, представлены в виде графиков.
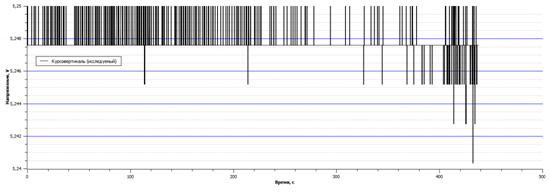
Рисунок 2. Напряжение на датчике ADIS16365.
Как мы видим на данном графике, показания напряжения стабильно держится в пределах 5В ±3%.
Тесты проводились с использованием алгоритма ориентации. Задача эксперимента, заключалась в проверки правильности работы алгоритма. Для этого на поворотном столе устройство курсовертикали наклоняли на -20о по крену и тангажу и записывали полученный результат на флешкарту.

Рисунок 3. Результаты испытаний блока курсовертикаль. а) крен. б) тангаж.
Из графиков видно, что полученные данные соответствуют заданным отклонениям. Погрешность в пару градусов связана с человеческим фактором и погрешностью самого поворотного стола.
Испытания курсовертикали на малом БПЛА
Задачей испытаний заключалось в записи данных на карту памяти и в дальнейшем получение информации с датчика. Считывание импульсов с датчика микроконтроллером STM32.
Тестирование оборудования происходило на БПЛА мультироторного типа, от компании DJI марки S1000+. Беспилотник имеет площадку для установки тестируемого оборудования 25см х 30см. Может поднимать оборудование весом до 5кг. Подниматься на высоту до 3км. Это было проверено в ходе тестовых испытаний самого БПЛА. Осуществлять облет с грузом по различным траекториям, заданным с командного пункта.
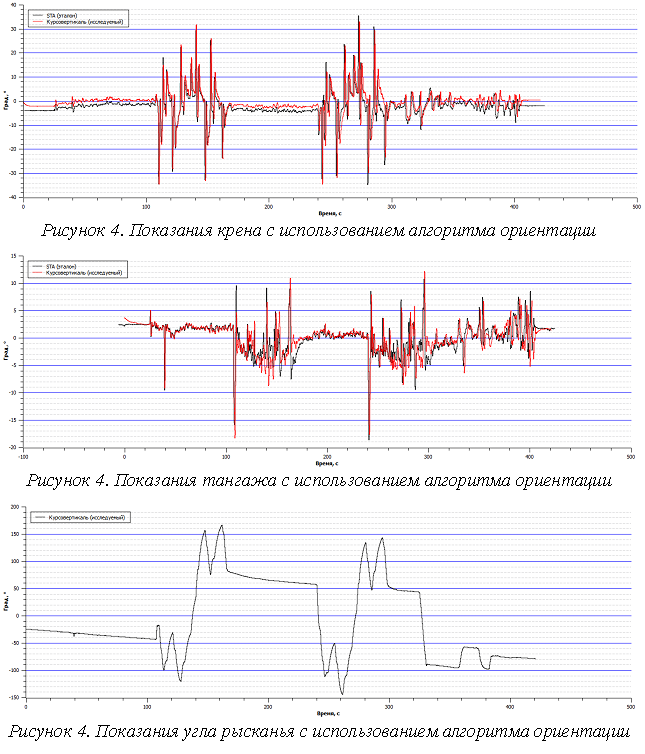
Было сделано 2 полета на октокоптере для проверки работы алгоритма и получения данных в полете. Полученные данные отобразили в виде графиков следующих значений: Крен, тангаж, угол рысканья, перегрузки (по 3-м осям), угловые скорости (по 3-м осям), температура и напряжение на датчике.
Заключение
Таким образом, разработанное устройство на базе платы вычислителя MMstm32F407 и трёхосевого датчика ADIS16365, показало свою работоспособность наилучшим образом. В результате испытаний блок курсовертикали подтвердил правильность схемотехнических решений и работоспособность алгоритмов. Для оценки работоспособности курсовертикали проводились многочисленные испытания, в ходе которых выявлялись и были устранены различные ошибки и недочеты, допущенные на этапах разработки системы. В ходе испытаний удалось добиться оптимальных параметров работы курсовертикали.
Были проведены 3 вида испытаний: лабораторные, наземные и летные испытания с использованием БПЛА. В лаборатории на стенде были заданы соответствующие углы, крена тангажа и угла рысканья для данного блока, чтобы посмотреть, как курсовертикаль отрабатывает записанный алгоритм в процессор платы MMstm32F407. В ходе испытаний была получена информация с датчика ADIS16365, такая как угол рысканья, крен, тангаж, перегрузки (по 3-м осям), угловые скорости (по 3-м осям), температура, напряжение на датчике.
Список литературы:
- Бусурин В.И. Исследование характеристик микрооптоэлектромеханического преобразователя угловых скоростей. / В.И. Бусурин, А.В. Казарьян, А.Т. Фам – М.: Вестник МАИ, 2015. — Т. 22, № 1. — C. 29-37.
- Качанов Б.О. Адаптивный алгоритм вычислителя гировертикали
беспилотного летательного аппарата / Качанов Б.О., Кулабухов В.С., Туктарёв Н.А., Гришин Д.В. // Томский государственный университет
систем управления и радиоэлектроники №3. Вып. 37. С 150-155. - Патент №2564380 С1. Способ коррекции бесплатформенной инерциальной навигационной системы // Заец В.Ф., Кулабухов В.С., Качанов Б. О., Туктарев Н.А., Гришин Д. В.; Заявитель и патентообладатель Открытое акционерное общество Московский научно-производственный комплекс «Авионика» имени О.В. Успенского (ОАО МНПК «Авионика»); заявл. 05.2014; опубл. 27.09.2015.
- Прокопьев И. В., Бецков А. В. Структура системы управления беспилотных летательных аппаратов специального назначения // НиКа . 2012. № С.84-85.[schema type=»book» name=»АВТОНОМНЫЙ БЛОК КУРСОВЕРТИКАЛЬ ДЛЯ ИССЛЕДОВАНИЯ ПЕРВИЧНЫХ АЛГОРИТМОВ» description=»Целью работы, являлось создание макетного образца курсовертикали для исследований первичных алгоритмов, состоящего из платы вычислителя MMstm32F407 и датчика ADIS16365. Провести ряд испытаний, включающих в себя лабораторные испытания на поворотном столе и тестирование в полёте на БЛА. В результате испытаний блок курсовертикали подтвердил правильность схемотехнических решений и работоспособность алгоритмов.» author=»Кулабухов Владимир Сергеевич, Туктарёв Николай Алексеевич, Гришин Дмитрий Викторович, Перепелицин Антон Вадимович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2016-12-18″ edition=»euroasia-science_28.04.2016_4(25)» ebook=»yes» ]