
Работа посвящена пространственным шарнирным механизмам, имеющим только вращательные шарниры и их практическому использованию в автоматизированных процессах различных направлений.
Следует отметить особенность механизмов этой группы. Образовать их обычной комбинацией звеньев весьма затруднительно, даже невозможно, поскольку звенья не проворачиваются. Объясняется это тем, что механизмы с вращательными шарнирами могут существовать только при согласованных угловых и линейных параметрах звеньев, «угадать» которые обычным методом исследования практически невозможно.
В технике были известны сферические механизмы, в частности, механизм Кардана – Гука, который сейчас широко используется в технике для передачи движения, ранее использовался для подвеса морских компасов.
Можно утверждать, что механизмы этой группы создавались отдельными учеными как изобретения. Именно так был открыт теоретически в 1903 г. английским математиком Беннеттом четырехзвенный пространственный механизм, оси шарниров которых скрещены (не параллельны и нигде не пересекаются) под разными углами, впоследствии механизм стали называть именем ученого [1]. Беннетт пытался изготовить модель механизма, но звенья его не проворачивались, поэтому автор сомневался в практическом использовании механизма.
Статья Беннетта послужила толчком к исследованию механизма другими отечественными и зарубежными учеными. Однако ни одному ученому не удавалось изготовить механизм Беннетта и другие механизмы не только в производственном варианте, но и в моделях. Здесь существовал существенный разрыв между теоретическими разработками ученых и практическим воплощением механизмов в технике.
Только 75 лет спустя казанским ученым Б.В.Шитикову и П.Г.Мудрову удалось найти способ изготовления моделей, а затем и производственных устройств на базе механизмов [2].
Можно отметить, что пространственные механизмы с вращательными шарнирами получили путевку «в жизнь, в производство» от ученых кафедры теории механизмов и машин Казанского государственного аграрного университета, чьи разработки являются приоритетными на мировом и отечественном уровнях [3,4,5,6,7,8,9].
Несмотря на бурное развитие техники, эта группа механизмов определилась и утвердилась практически за последние годы сотрудниками только одной кафедры. За это время разработана теория пространственных механизмов с вращательными шарнирами, в том числе:
— разработан способ структурного синтеза многозвенных механизмов, исследована как теоретически, так и экспериментально структура четырехзвенных, пятизвенных, шестизвенных, семизвенных и дифференциальных механизмов,
решена проблема создания многозвенных механизмов с наперед заданными свойствами. Предложены четыре способа образования 5, 6, 7, дифференциальных и многозвенных механизмов;
-разработаны способы кинематического и динамического исследования механизмов всех групп, исследовано внешнее давление подвижных звеньев на станину, предложено несколько способов уравновешивания механизмов;
-разработан синтез механизмов в зависимости от функционального назначения;
-разработана технология изготовления устройств для мелкосерийного и индивидуального производств;
-разработана теория создания пространственных перемешивающих устройств: четыре направления проектирования аппаратов с мешалкой, семь новых классификационных групп пространственных смесителей и семь групп объектов новой техники;
-предложено и разработано более 100 новых механизмов и устройств на их базе, защищенные 103 авторскими свидетельствами и патентами на изобретения;
-только на базе механизма Беннетта создано 34 устройств на уровне изобретений, кроме этого механизм Беннетта явился «строительным модулем» в образовании новых многозвенных механизмов и устройств на их базе;
-от механизма Беннетта началось и развилось новое научное направление в теории пространственных механизмов, которых сто лет назад было менее десяти;
-внедрено более 50 устройств на сельскохозяйственных и промышленных предприятиях России и Украины;
Трудность становления и развития механизмов окупилась разнообразием полезных свойств, по числу которых они не имеют себе равных среди других известных механизмов, которых насчитываются тысячи.
В данной статье приведем только часть сведений о практическом использовании механизмов данной группы в производственных автоматизированных процессах.
В технологическом процессе приготовления комбикорма для птицефабрик в смесь добавляют микродобавки и витамины (2кг на 1 т комбикорма), причем процесс должен осуществляться непрерывно. Для равномерного смешения микродобавок использован пространственный смеситель на базе механизма Беннетта (рисунок 1). Он имеет емкость1, два кривошипа 2 и 3 и станину 4. Кривошипы 2 и 3 полые, с ведущим кривошипом 2 связан подающий патрубок 5, с заслонкой 6. С ведомым кривошипом 3 соединен приемный патрубок 7 с заслонкой 8.
На ведущем кривошипе 2 жестко закреплен шкив 9, второй шкив 10 закреплен на валу источника привода 11 (мотор-редуктор или электродвигатель с редуктором).
Перемешиваемый материал подается в емкость 1 через подающий патрубок 5, готовая смесь выводится через полый ведомый кривошип 3 и патрубок 7. Количество подающего и выводящего материала регулируется заслонками 6 и 8.

Данное устройство без переналадок можно использовать в линиях для очистки различных деталей в машиностроении, мойки корнеклубней в сельскохозяйственном производстве и т.п.
Механизм эффективно может копировать различные движения, например, траекторию ковша землеройной машины (рисунок 2). Ковш жестко закреплен на продолжении шатуна механизма Беннетта, параметры которого синтезированы на заглубление ковша в грунт, захват грунта, отвод ковша с грунтом в сторону, выгрузку грунта. На рисунке 3 показана траектория ковша: на участке ab ковш заглубляется в грунт под острым углом, затем на участке bc движется горизонтально. На участке abc происходит заполнение ковша грунтом, на участке cde – выглубление ковша, отвод его в сторону и подъем на определенную высоту. На участке ef ковш значительно наклоняется, днище устанавливается под углом 80-850 к горизонтальной поверхности и резко отводится назад – происходит выгрузка массы грунта. На участке fa ковш возвращается в исходное положение и цикл повторяется. При этом скорость рабочего хода в 2,5…4,0 раза меньше скорости холостого хода. Дальность выгрузки можно регулировать изменением длины кривошипов и несущего рычага (шатуна). Устройство можно использовать в режиме рытья траншей.
При определенных параметрах звеньев механизма Беннетта точки его шатуна копируют движение крыла птиц при полете.
Следующий пример — использование шестизвенного механизма в роботах, манипуляторах и в грузозахватных устройствах, где необходимо осуществить точный схват предметом разнообразной формы.
На рисунке 4 показано устройство при удержании груза, на рисунке 5 – положение захвата в раскрытом положении.
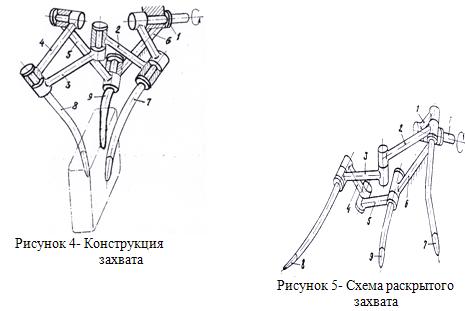
Захват состоит из ведущего кривошипа 1, соединенного шарнирно со звеньями 2,3,4,5 и станины 6. Все звенья имеют одинаковое кратчайшее расстояние между осями шарниров, т.е. ℓ1=ℓ2=ℓ3=ℓ4=ℓ5=ℓ6=ℓ. Угол скрещивания осей шарниров нечетных звеньев 1,3,5 одинаковы, т.е. α1=α3=α5=α и меньше 900. Угол скрещивания β осей шарниров четных звеньев 2,4,6 дополняют до 1800 угол скрещивания осей шарниров нечетных звеньев, т.е. β=1800-α (на рисунках 4 и5 углы не показаны).
К концам нечетных звеньев 1,3 и 5 жестко крепятся зажимные губки 7.8 и 9 (губки могут выполняться заодно со звеньями, сообразуясь с технологией изготовления). Захватные части губок могут выполняться в разных вариантах: плоскими, рифлеными, фигурными, пружинными и т.д.
Схват груза осуществляется следующим образом. От источника привода вращение передается ведущему кривошипу 1 и звеньям 2,3,4 и 5, захватные губки 7,8 и 9 одновременно поворачиваются относительно звеньев 2,4 и 5, а звенья 7 и 8 будут перемещаться навстречу друг другу, т.е. захват закрывается и зажимает объект с трех сторон.
При противоположном вращении кривошипа 1 звенья движутся в обратном направлении и губки 7,8 и 9 раскрываются (рисунок 5).
Если манипулятор работает только с одним видом груза, то можно отрегулировать закрытие и открытие губок при одном направлении вращения кривошипа 1,что очень важно при автоматическом режиме работы.
Механизмы могут успешно использоваться вместо эллиптических колес, причем при пересекающихся, скрещивающихся и параллельных осях вращения.
Возникает проблемный вопрос, почему за двухтысячилетний период механизмы с большим трудом развивались и практически не использовались в технике? На наш взгляд причины следующие.
— Механизмы этой группы обычной комбинацией звеньев создать трудно и практически невозможно.
— Механизмы статически неопределимы (трижды, дважды и один раз) и формально не должны существовать, поэтому ученые и практики мало уделяют им внимание.
— Механизмы могут существовать при строго согласованных угловых и линейных параметрах и соотношениях между ними, которые необходимо определять.
— Изготовление механизмов и устройств на их базе имеет особую специфику (Ноу-Хау), без знания которой изготовление работоспособной конструкции практически невозможно.
— Ни у нас в стране, ни за рубежом нет, ни ученых, ни научных школ, которые серьезно занимались бы комплексным исследованием, изготовлением и внедрением этих механизмов в производство.
— В подготовке инженеров технического профиля имеется существенный пробел, так как в издаваемых учебниках по ТММ об этих механизмах нет даже элементарных сведений.
Выводы.
— На мировом и отечественном уровнях такие механизмы пока исследуются только теоретически, нет сведений о изготовленных в металле механизмов и производственных устройств на их базе, использующихся в технике. Здесь уместно привести изречение А.В.Суворова «Теория без практики мертва …».
— Создано новое научное направление в теории пространственных механизмов с одними вращательными шарнирами сотрудниками только одной кафедры ТММ Казанского государственного аграрного университета, разработки которых имеют отечественный и мировой приоритеты. Сотрудниками кафедры защищено 4 докторских диссертаций (Мудров П.Г., Мудров А.Г., Галиуллин Ш.Р., Яруллин М.Г.), 9 кандидатских (П.Г.Мудров, А.Г.Мудров, А.П. Жарковский, А.П.Мудров, М.Г.Яруллин, Ш.Р. Галиуллин, С.М.Яхин, Б.К.Хуснутдинов, И.М.Киямов), опубликовано 6 монографий, более 100 статей в различных изданиях, на 103 устройств получены авторские свидетельства и патенты, около 50 устройств внедрены в производство.
— Механизмы только с вращательными шарнирами имеют обширные высокоэффективные многофункциональные свойства, которых нет у механизмов других многочисленных групп. К большому сожалению, эти механизмы пока практически не востребованы в проектных и конструкторских организациях нашей страны в виду их неизвестности.
— Не только инженерно-технические кадры, но даже авторы статей и диссертаций вообще не знакомы с публикациями казанских ученых (об этом свидетельствует отсутствие в своих теоретических работах по данным механизмам ссылок на наличие более ста новых механизмов и изобретений этой группы, изготовленные и внедренные производственные устройства в различных разделах техники).
Список литературы
- 1. Bennett, G.T. A new mechanism. «Engineering», London, v.76, 1903, p.777-778.
- Мудров П.Г. Пространственные механизмы с вращательными парами / П.Г. Мудров. – Казань: Изд-во Казанского государственного университета, 1976. – 264 с.
- Мудров П.Г. Исследование пространственных шарнирных механизмов с особой структурой и их внедрение в машиностроении: Автореферат дисс. докт. техн. наук: 05.02.18 / П.Г. Мудров. — М.: ИМАШ, 1979. — 44 с.
- Мудров А.Г. Пространственные механизмы с особой структурой / А.Г. Мудров. – Казань: РИЦ «Школа», 2003. – 300 с.
- Мудров А.Г. Разработка пространственных перемешивающих устройств нового поколения, применяемых в сельском хозяйстве и промышленности: Автореферат дисс. докт. техн. наук: 05.02.18 / А.Г. Мудров. — Казань: КГСХА, 1999. — 44 с.
- Мудров А.Г. Пространственные механизмы с особой структурой (Исследование) / А.Г. Мудров. – Казань: РИЦ «Школа», 2004. – 180 с.
- Мудров А.Г. Пространственные перемешивающие устройства / А.Г. Мудров. — Казань: Таткнигоиздат, 1984. — 179 с.
- Мудров А.Г. Механизм Беннетта и использование его в технике / А.Г. Мудров. – Казань: КГСХА, 1999. – 80 с.
- Мудров А.Г. Практическое использование механизма Беннетта в технике/ The Eigth IFToMM International Symposium on Theory of Machines and Mechanisms. SYROM 2001. Bucharest-ROMANIA, 2001. Vol.11, pp.221-228.[schema type=»book» name=»МЕХАНИЗМЫ С ОСОБОЙ СТРУКТУРОЙ В АВТОМАТИЗАЦИИ ПРОЦЕССОВ» author=»Мудров Александр Григорьевич, Мудрова Анна Александровна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-06-16″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.12.2014_12(09)» ebook=»yes» ]