
- General problem and main steps of quantum inference block
Our aim is to develop new control technologies for PID based control systems which promote automatic robust control at more and higher intelligent level. Robustness assumes a capability of control system to work neither in teaching control situations nor in unpredicted control situations. In this case a control system may encounter some operational conditions that evolve dramatically (aging of control object, sensor failure, sensor’s noises or delay, unpredicted stochastic noises etc.).
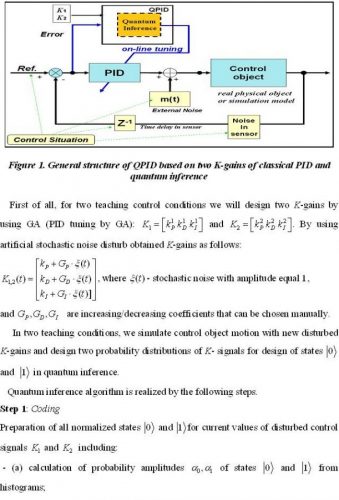
On Fig. 1, the general structure of control system with quantum PID controller (QPID) in the presence of external stochastic noise, sensor’s time delay and noise in sensor system is shown. Consider main ideas of Quantum Inference (QI) based on two PID gains. The strategy of QI is analogical to strategy of quantum fuzzy inference [1, pp. 262-264].
Remark. Simulations are made by using Matlab-Simulink 7.1 environment and QC Optimizer tools.
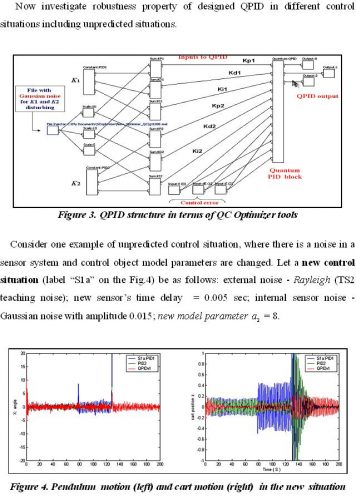
As you can see, QPID controller (with variable gains) is successful to balance a Pendulum (a pole) in the new situation. Classical PID1 and PID2 controllers (with constant gains) are unsuccessful to balance the Pendulum in new situation. (The pole is fall.) Thus, the simulation results show that QPID controller demonstrates a self-organization capability to new unpredicted control situations, while classical PID regulators are incapable to do this.


Conclusion
- For practical applications, when we have deal only with classical PID regulators, we may increase robustness of PID by using quantum inference block;
- In this case only two sets of PID K-gains for two different control situations are needed;
- The quantum inference block represents a new type of calculation based on quantum computing ideas;
- Simulation results show good self-organization properties of QPID based on quantum inference block;
- Further investigations of different QPID models are considered as useful and important.
References
- Karatkevich S.G., Litvintseva L.V., and Ulyanov S.V. Intelligent Control Systems. II. Design of Self-Organized Robust Knowledge Bases in Contingency Control Situations: J. of Computer and Systems Sciences Intern., Vol. 50, № 2, 2011. pp. 250 –292. (in Russian: Караткевич С.Г., Литвинцева Л.В.,
- Ульянов С.В. Интеллектуальные системы управления. II. Проектирование самоорганизующихся робастных баз знаний в непредвиденных ситуациях управления: ИЗВЕСТИЯ РАН. ТЕОРИЯ И СИСТЕМЫ УПРАВЛЕНИЯ, № 2, 2011. – c.74 -115.)
- Litvintseva L. V., Ulyanov I.S., Ulyanov S. V. and Ulyanov S. S. Quantum fuzzy inference for knowledge base design in robust intelligent controllers: J. of Computer and Systems Sciences Intern., Vol. 46, № 6, 2007. pp. 908 – 961.
- Litvintseva L.V., and Ulyanov S.V. Quantum Computing and Self-Organization Algorithm: Izv.Ross.Akad.Nauk. teor.Sist.Upr., No.6, 2009. – pp. 69-97.
- Vasiliev V.I., Iliyasov B.G. Artificial Intelligence and Intelligent Control systems. Theory and Practice. M.: Radiotechnika, 2009. – 392 p. (in Russian)[schema type=»book» name=»TOWARD A QUANTUM PID CONTROLLER DESIGN BASED ON QUANTUM INFERENCE PROCESS» description=»In this article we continue to develop new types of calculations (based on quantum and soft computing) that increase controllability and robustness properties of advanced control systems. We propose and investigate a new problem: a quantum PID controller design based on quantum inference process with two given constant K-gains of classical PID controllers. This process is correlated with our idea of a quantum fuzzy inference process (see web-site qcoptimizer.com or mcgquantum.com). The quantum inference block represents a new type of calculation that allows introducing a self-organization property into classical PID regulators. Simulation results show efficiency of proposed method. » author=»Litvintseva Liudmila Vasilievna, Ulyanov Sergey Victorovich» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-06-12″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.12.2014_12(09)» ebook=»yes» ]