
Эффективными методами решения квадратичных задач оптимального управления являются метод приращений и его модификации [1,2]. Это методы последовательного нелокального улучшения допустимых управлений, способные улучшать управления, удовлетворяющие принципу максимума, вследствие наличия в их процедурах разрывных систем. Работа с разрывными системами расширяет возможности улучшения, но вместе с тем порождает патологические ситуации отсутствия решения таких систем на заданном отрезке. Модификации метода, регуляризирующие такое положение теряют свойство улучшать любое управление, не удовлетворяющее принципу максимума.
Для преодоления указанных недостатков в предлагаемом ниже методе улучшения допустимых управлений в квадратичной задаче проводится регуляризация целевого функционала, которая носит комбинированный характер. Вместо исходной задачи решается задача на минимум вспомогательного функционала, который получен в результате добавки к целевому функционалу среднеквадратичного фазового отклонения и отклонения по управлению.
- Постановка задачи
Рассмотрим задачу минимизации квадратичного функционала
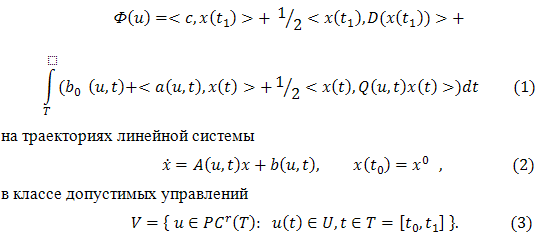
Внесем необходимые предположения. Пусть матричные функции A(u, t) и Q(u, t), вектор-функции a(u, t) и b(u, t) функция ![]() непрерывны по совокупности своих аргументов на прямом произведении U×T. Множество допустимых значений управления u(t) — компакт в
непрерывны по совокупности своих аргументов на прямом произведении U×T. Множество допустимых значений управления u(t) — компакт в ![]() , начальное состояние
, начальное состояние ![]() и отрезок времени T заданы.
и отрезок времени T заданы.
Определим необходимые конструкции:
функция Понтрягина
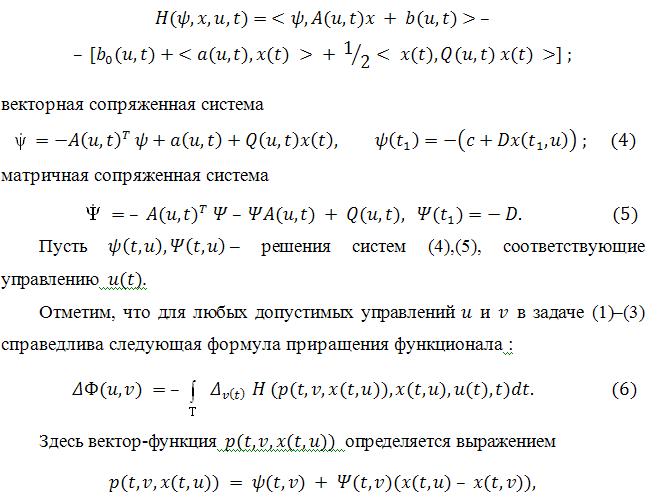
в котором x(t, u) и x(t, v) – фазовые траектории, соответствующие управлениям u и v, и Ψ(t, v) – удовлетворяют системам (4), (5) на управлении v(t), символ ![]() означает частное приращение по управляющей переменной на паре u(t) и v(t).
означает частное приращение по управляющей переменной на паре u(t) и v(t).
2.Процедура улучшения
Пусть ![]() , допустимая пара в задаче (1)-(3). Введем вспомогательный функционал
, допустимая пара в задаче (1)-(3). Введем вспомогательный функционал
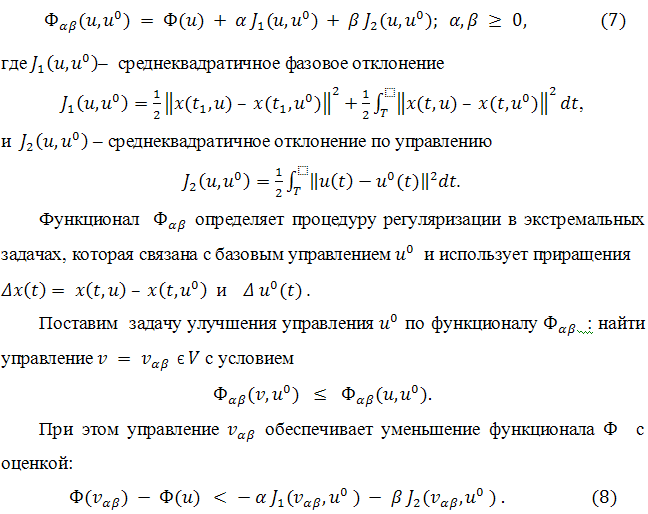
Отметим, что функционал ![]() сохраняет свойство квадратичности исходного функционала, меняя при этом структуру задачи (при β≠0) относительно управления .
сохраняет свойство квадратичности исходного функционала, меняя при этом структуру задачи (при β≠0) относительно управления .
Применительно к aβ– функционалу функция Понтрягина примет вид
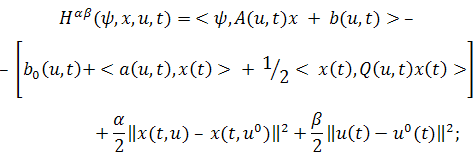
Сопряженная Ψa(t, u) вектор-функция ( не зависит от β) является решением задачи Коши
Матричная сопряженная система
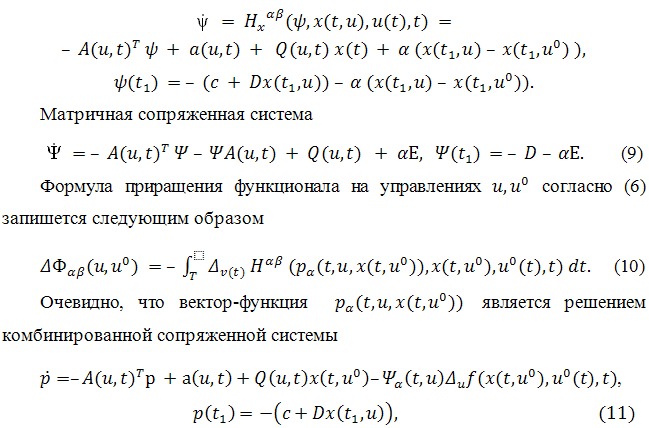
где через f(x, u, t) обозначена правая часть фазовой системы (2).
Представление (10) является конструктивным и служит основой для построения aβ -параметрической процедуры улучшения управления ![]() .
.
Сформируем экстремальное управление
Процедура улучшения управления заключается в следующем:
поэтому на основании формулы (10) при ![]() имеет место улучшение
имеет место улучшение ![]() с оценкой уменьшения (7) для функционала Φ(u).
с оценкой уменьшения (7) для функционала Φ(u).
Отметим особенности рассмотренной процедуры. В зависимости от значений параметра β изменяется структура функции Понтрягина и, как следствие, меняются свойства сопряженных систем. При β = 0 системы (9), (11) являются разрывными, что позволяет улучшать (при a ≠ 0) управления, удовлетворяющие принципу максимума. При β ≠ 0 процедура не связана с разрывными системами (и, как следствие, с ситуацией отсутствия их решения) и обладает свойством улучшать любое управление, не удовлетворяющее принципу максимума. Отметим, что при aβ = 0 мы получаем известный метод приращений.
Сформулируем необходимое условие оптимальности управления ![]() , связанные с данной процедурой. Обозначим через
, связанные с данной процедурой. Обозначим через ![]() множество управлений
множество управлений ![]() , на выходе процедуры и предположим, что выполнено условие:
, на выходе процедуры и предположим, что выполнено условие:
![]()
Принцип максимума. Для оптимальности управления ![]() (t) в задаче (1) – (3) необходимо, чтобы
(t) в задаче (1) – (3) необходимо, чтобы ![]() хотя бы для одной пары α, β ≥ 0.
хотя бы для одной пары α, β ≥ 0.
Список литературы
- Захарченко В.С. , Срочко В.А. Метод приращений для решения квадратичных задач оптимального управления // Изв. РАН. Теория и системы управления. 1995. №6. С.145-154.
- Срочко В.А. Итерационные методы решения задач оптимального управления .- М.: Физматлит, 2000. — 160с.[schema type=»book» name=»РЕГУЛЯРИЗАЦИЯ ПРОЦЕДУРЫ УЛУЧШЕНИЯ ДОПУСТИМЫХ УПРАВЛЕНИЙ В КВАДРАТИЧНОЙ ЗАДАЧЕ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ» description=»Эффективность методов решения квадратичных задач оптимального управления методом приращений и его модификациями обусловлена наличием в их процедурах разрывных систем. Но при этом порождаются патологические ситуации отсутствия решения таких систем на заданном отрезке. Для преодоления указанных недостатков предлагается методика решения, использующая регуляризацию задачи. В результате, вместо исходной задачи решается задача на минимум вспомогательного функционала, который получен добавлением к целевому функционалу среднеквадратичного фазового отклонения и отклонения по управлению.» author=»Захарченко Варвара Сергеевна» publisher=»Басаранович Екатерина» pubdate=»2016-12-17″ edition=»euroasia-science_28.04.2016_4(25)» ebook=»yes» ]