
На современном этапе развития цивилизации сосудистая патология стала одной из основных проблем здравоохранения. По данным Всемирной Организации Здравоохранения, ежегодно регистрируется 100–300 случаев инсультов на каждые 100000 населения, из них 60% больных становятся инвалидами. По данным регистра мозгового инсульта НИИ неврологии РАМН, к концу острого периода двигательные нарушения наблюдаются у 81,2% из 100 выживших больных. Около 10% больных, переживших ишемический инсульт, полностью лишены возможности самообслуживания, и только 20% возвращаются к трудовой деятельности [1].
В связи с этим актуальной представляется задача по созданию технических средств, помогающих больным на этапе реабилитации осуществлять сложные виды движения, такие как вертикализация, приседания, ходьба и другие. В Японии, США, Южной Корее, Германии, и России ведутся работы по созданию устройств, позволяющих человеку передвигаться в пространстве при повреждении нижних конечностей [2,3].
На кафедре мехатроники и робототехники ЮЗГУ (г. Курск) ведется работа по созданию мехатронных устройств активного и пассивного типа, позволяющих моделировать динамические процессы, протекающие в опорно-двигательном аппарате. На первом этапе был разработан прототип экзоскелета, представляющий собой двуногий механизм, приводимый в движение линейными актюаторами [4]. Общий вид пассивного экзоскелета представлен на рисунке1.
Устройство снабжено сенсорной системой, включающей в себя энкодеры для определения относительных углов поворота звеньев, каждая ступня дополнительно снабжена двумя датчиками давления, определяющими нормальные реакции в точках контакта ступни с опорной поверхностью.
Рисунок 1. Общий вид экзоскелета
С использованием данного прототипа экзоскелета проведены испытания, показавшие уверенный подъем пациента из различных начальных положений. На втором этапе исследования было проведено математическое моделирование движения пациента в экзоскелете, которое показало существенную зависимость траектории движения центра масс системы от параметров PI регулятора. Поэтому в дальнейшем для получения заданных показателей качества управляемой механической системы, решена задача об определении оптимальных параметров регулятора, обеспечивающих минимальную «колебательность» устройства и минимальные отклонения от заданной траектории.
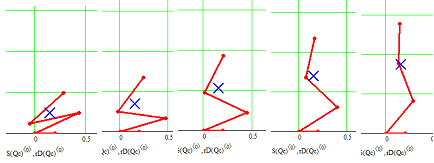
Расчеты, выполненные для различных начальных условий, показали, что пациент устойчиво встает из положения «сидя» для любых начальных условий (рис. 2).
{kind=link}
Рисунок 2. Динамика положения механизма при вертикализации
На основе исследований математической модели динамической системы предложены базовые режимы работы мехатронного устройства и разработаны алгоритмы управляющей программы, реализующие описанные режимы.
Работа выполнена при поддержке гранта РНФ. Соглашение № 14-39-00008 от 09.09.2014г.
Список литературы
1. Леонтьев М.А. Лечение и реабилитация пациентов с травматической болезнью спинного мозга // Реабилитация инвалидов с нарушением функций опоры и движения / Под ред. Л.В.Сытина, Г.К.Золоева, Е.М.Васильченко. — Новосибирск, 2003.
- Саврасов, Г.В. Медицинская робототехника: Условия, проблемы и основные принципы проектирования // Биомедицинская инженерия и технология. №2, 1998.- С. 35 – 50.
- Турлапов Р.Н., Яцун С.М. Разработка и исследование реабилитационного устройства для механотерапии нижних конечностей // Фундаментальные исследования – 2014. – № 12, Ч. 9. – С. 1909 –
-
Яцун С.М., Турлапов Р.Н. Разработка и исследование реабилитационного устройства для механотерапии нижних конечностей // Фундаментальные исследования – 2014. – № 12, Ч. 9. – С. 1909 –[schema type=»book» name=»МЕХАТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ ДИНАМИКИ ФУНКЦИОНИРОВАНИЯ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА НА ЭТАПЕ РЕАБИЛИТАЦИИ У ПОСТИНСУЛЬТНЫХ БОЛЬНЫХ » description=»В статье рассмотрены вопросы исследования опытного образца биомехатронного устройства для вертикализации человека. Поставленные задачи решаются с применением методов механики, математического моделирования и систем управления. Предлагаемое механотерапевтическое устройство обеспечивает заданную биомеханику движений. Данное устройство может быть использовано для изучения характера движения отдельных звеньев опорно-двигательного аппарата, необходимого при создании активных аппаратов, улучшающих качество жизни постинсультных и спинальных больных.» author=»Яцун Светлана Михайловна, Соколова Ирина Александровна, Тарасов Олег Сергеевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2016-12-23″ edition=»euroasian-science.ru_25-26.03.2016_3(24)» ebook=»yes» ]