
Постановка задачи проектирования
Проектируемые в работе устройства предназначены для преобразования угла сдвига фаз между двумя синусоидальными сигналами одной частоты в цифровой код [1]. Известно, что они представляют собой базовую часть многих импедансных анализаторов, измерителей параметров импеданса и цифровых фазометров (ЦФ) [2]. В последние годы наметилась тенденция роста областей применения перечисленных устройств, а значит, тенденция роста востребованности и значимости преобразователей угла сдвига фаз (далее — ПУФ), причинами которых являются:
— производство зарубежными фирмами ПУФ с высокими техническими характеристиками и с умеренной ценой;
— принятие во внимание того, что угол сдвига фаз между двумя синусоидальными сигналами одной и той же частоты является высокоинформативным параметром, несущим достоверную информацию о свойствах, состоянии и качестве объекта контроля.
Этот параметр наиболее используем в импедансном методе, предназначенном для исследований или диагностики медико-биологических объектов [3], различных материалов технического применения, осуществления многих технологических процессов в производстве [4]. Напомним, что в этих случаях достаточно через объект контроля пропустить электрический ток известной частоты, который при прохождении претерпевает опережение или отставание по фазе. Между входным током — iвх=Imsin(ωt+φвх) и выходным током — iвых=Imsin(ωt±φвых) образуется угол сдвига фаз, определяемый из выражения — ∆ φ= φ вх± φвых.
Угол Δφ является высокоинформативным параметром, поэтому его измерение — актуально. Вопросы проектирования преобразователей, необходимых для измерения этого угла, и рассматриваются в работе.
Следует отметить, что существующие ПУФ, а также ЦФ, для решения научных задач, задач диагностики и контроля, а также задач управления технологическими процессами не всегда соответствуют требованиям, предъявляемым учеными и производственниками. Это и отмеченное выше определяют необходимость и актуальность поиска новых путей совершенствования ПУФ, а значит важность совершенствования принципов проектирования ПУФ, обеспечивающих улучшение их характеристик. Таким образом, предлагаемая работа, посвященная задаче улучшения характеристик ПУФ, является актуальной.
Методика проектирования
Проектирование ПУФ в работе предложено выполнять на основе пяти принципов, предусматривающих:
— осуществление проектирования по рациональной методике, заимствованной или разработанной самостоятельно;
— определение типа исполнения ПУФ (аналоговое или цифровое исполнение);
— построение оптимальной структуры ПУФ на базе анализа известных технических решений;
— выбор экономичной элементной базы для реализации ПУФ;
— оптимизация ПФУ и отдельных его блоков.
Для реализации перечисленных принципов была разработана методика, представленная в виде блок-схемы (рисунок 1), из которой видны основные этапы проектирования. Не останавливаясь на рассмотрении этих этапов, а также на анализе выделенных принципов проектирования и их взаимосвязи с этапами, отметим лишь основные особенности процесса проектирования ПУФ. Так, поиск новых подходов к проектированию ПУФ, базирующихся на анализе современных схемотехнических решений, показал, что и технические, и стоимостные характеристики ПУФ могут быть существенно улучшены при построении их на базе микроконтроллеров. Кроме этого, был сделан вывод о том, что появление ПУФ и ЦФ с улучшенными функциональными возможностями и, одновременно, с умеренной ценой ведет к обязательному новому витку роста областей применения ПУФ и ЦФ, а значит к повышению спроса на эти устройства.
Выбор микроконтроллера для создания ПУФ предопределил такие возможности ПУФ, как цифровая обработка данных, их архивирование, хранение, составление отчетов и протоколов по результатам измерения, применение искусственного интеллекта. Также микроконтроллер обеспечивает: повышение точности измерения; цифровое отображение результатов измерения, связь с ЭВМ верхнего уровня и т.д. Отсюда следует, что использование микроконтроллера в ПУФе приводит к значительному расширению его функциональных возможностей.

Рисунок 1. Блок-схема алгоритма проектирования ПУФ с микроконтроллером
Техническая реализация ПУФ
Наиболее целесообразно ПУФ проектировать с делением его на два блока: аналоговый и цифровой [5]. Вариант проектирования аналогового блока ПУФ на основе операционных усилителей показан рисунке 2, а вариант — микроконтроллерного цифрового блока ПУФ показан на рисунке 3. Предусматривается подача на вход аналогового блока ПУФ двух синусоидальных сигналов, один из которых принимается в качестве образцового (опорного) сигнала и, как правило, подается на опорный вход ПУФ. Второй сигнал принимается в качестве исследуемого и имеющего сдвиг фазы относительно образцового сигнала и подается обязательно только на измерительный вход ПУФ. Алгоритм функционирования ПУФ, как итог, обеспечивает определение величины угла сдвига фаз между двумя названными сигналами и представление этой величины в цифровом виде. При этом ПУФ предусматривает подачу сигналов на входы аналогового блока, выполненный на операционных усилителях DA1, DA2 и DA3. Он формирует прямоугольные импульсы с длительностью t, пропорциональной углу сдвига фаз Δφ, и выполняет функцию — t=f(Δφ). После поступления этих импульсов на вход цифрового блока ПУФ в микроконтроллере происходит отсчет длины принятых импульсов путем использования встроенного таймера и 2-х регистров.
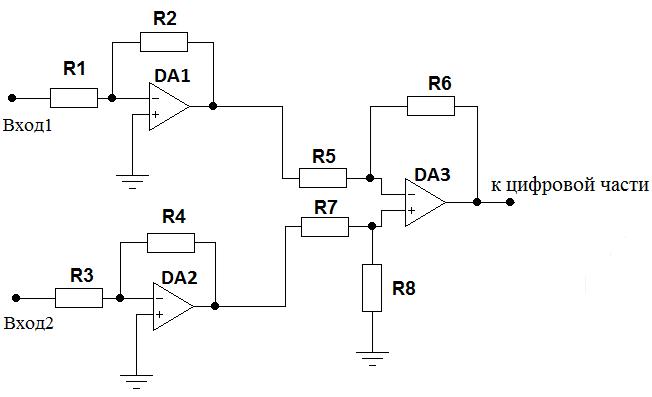
Рисунок 2. Схема аналогового блока ПУФ
По окончании отсчета длины принятых импульсов происходит инвертирование полученного в регистрах числа, обращение к группе ячеек памяти, в которых хранится таблица символов, выводимых на индикатор ПУФ. Она будет показана ниже. По окончанию последней процедуры микроконтроллер выводит на дискретный индикатор кодовые сигналы КС, соответствующие углу сдвига фаз между двумя синусоидальными сигналами в виде удобном для оператора, т.е. выполняется функция КС= f(Δφ).
Наиболее важной составляющей ПУФ является его цифровой блок, в состав которого входят следующие основные схемные элементы: микроконтроллер в виде микросхемы КМ1816ВЕ48, 2 параллельных программируемых адаптера (ППА) в виде микросхем КР580ВВ55А, 4 цифровых знакосинтезирующих индикатора И1…И4.
Рисунок 3. Схема цифрового блока ПУФ
Резисторы во входных цепях семисегментных индикаторов И1…И4 используются для ограничения входных токов. Одновременно эти резисторы ограничивают выходные токи ППА. Рассмотрим подробнее элементы цифрового блока ПУФ.
- Схема микроконтроллера КМ1816ВЕ48. Имеет встроенное ПЗУ для хранения программ и 3 порта для связи с ППА. Схема микроконтроллера обеспечивает обработку получаемой информации и вывод результатов вычислений. Основными выводами схемы микроконтроллера являются:
— BQ1 и BQ2, необходимые для подключения кварцевого резонатора, задающего в схеме тактовую частоту, в схеме f = 6 МГц;
— SR, используется для обнуления ОЗУ и отсоединения выводов портов схемы микроконтроллера в момент подключения схемы к питанию;
— SS, необходимый для пошагового режима выполнения программы (в приведенной схеме устройства этот вывод не используется, поэтому подключён к питанию +5В);
— INT, используется для обеспечения прерывания выполнения программы;
— UСС и UDD, необходимые для подключения схемы микроконтроллера к питанию;
— EMA, обеспечивающий выбор ПЗУ для работы со схемой микроконтроллера;
— PR, необходим для перепрограммирования схемы микроконтроллера;
— GND, используется как общий вывод;
— PME, необходим для обращения к внешнему ПЗУ;
— ALE, используем для стробирования сигнала;
— P1.0-P1.7, являющиеся выводами порта Р1 и образующие шину адреса для управления портами ППА;
— P0.0-P0.7, являющиеся выводами порта Р0 и образующие шину данных для передачи данных между схемой микроконтроллера и схемами ППА;
— RD, необходим для подачи на выход схемы ППА сигнала чтения.
- Параллельный программируемый адаптер (ППА) в виде микросхемы КР580ВВ55А. В его состав входят три порта, обозначенные А, В и С. Порт А, необходим для восприятия сигнала-импульса, соответствующего сдвигу по фазе между образцовой синусоидой и сдвинутой. Порт В, необходим для индикации цифры, соответствующей десяткам градуса. Порт С, необходим для индикации цифры, соответствующей единицам градуса. Основными выводами ППА являются: SR — вывод сброса, работа которого аналогична соответствующему выводу микроконтроллера; CS — вывод выбора кристалла; A0, A1 — выводы, подсоединяющиеся к шине адреса и необходимые для выбора портов ввода/вывода; D0-D7 — выводы, подсоединяющиеся к шине данных и необходимые для обмена информацией с микроконтроллером; RD,WR — выводы для получения чтения/записи; порты A, B, C и т.д.
Для обеспечения вывода нужных символов на индикатор в памяти микроконтроллера содержится таблица, используемая для вывода нужных символов на индикатор. Эта таблица называется прошивкой ПЗУ микроконтроллера и приведена как табл. 1, в первом столбце которого указаны все цифры, отображаемые индикаторами. Во втором столбце — элементы индикации (аноды — сегменты), участвующие в визуальном отображении цифры. В третьем столбце — коды элементов индикации (обратные коды). В четвертом столбце — коды выводов индикатора (прямые коды). В пятом столбце — шестнадцатеричные коды и в шестом столбце — адреса ячеек памяти ПЗУ, участвующие в хранении данных.
Таблица 1.
Прошивка ПЗУ
| Ци
ф р а |
Элементы индикатора | Код элементов индикатора | Код выводов индикатора | Шест-надца-терич-ный код |
Адрес ячейки ПЗУ |
||||||||||||||
| A | B | C | D | E | F | G | H | E | D | C | H | B | A | G | F | ||||
| 0 | ABCDEF | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 48 | 0809 |
| 1 | BC | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | EB | 0808 |
| 2 | ABEDG | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 8C | 0807 |
| 3 | ABCDG | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 89 | 0806 |
| 4 | BCFG | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 2B | 0805 |
| 5 | ACDFG | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 19 | 0804 |
| 6 | ACDEFG | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 18 | 0803 |
| 7 | ABC | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | CB | 0802 |
| 8 | ABCDEFG | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 08 | 0801 |
| 9 | ABCDFG | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 09 | 0800 |
Разработанный ПУФ выполнен на основе отечественного микроконтроллера, что обеспечивает ему преимущества по сравнению с аналогами. В числе этих преимуществ, главным образом, следующие: широкие функциональные возможности, высокая точность преобразования угла сдвига фаз, малые габаритные размеры, относительно низкая цена и пр.
В заключении важно отметить то, что работа представляет большой интерес и научным работникам, и студентам, и аспирантам, проектирующим электронную аппаратуру как для научных исследований, так и для реализации технологических процессов.
Список литературы:
- Раннев Г.Г. Методы и средства измерений: Учебник для вузов/Г.Г. Раннев, А.П. Тарасенко. – 2-е изд., стереотип. – М.: Издательский центр «Академия», 2004. – 336 с.
- Ратхор Т.С. Цифровые измерения. АЦП/ЦАП. Москва, Техносфера, 2006. – 392 с.
- Хасцаев Б.Д., Хасцаев М.Б. Применение информационных свойств электрического импеданса биообъектов в медицине и биологии. Германия: LAMBERT Academia Publishing, 2013. — 98 с.
- Хасцаев Б.Д., Мустафаев Г.А. Повышение точности и достоверности контроля в ТП производства изделий микроэлектроники//Известия КБГУ. Вып.1. 2012.
- Хасцаев Б.Д., Королев А.Л., Тинаев В.В. Микроконтроллерный фазометр//Сб. Научных трудов СОО АН ВШ РФ. Владикавказ: «Терек» СКГМИ, № 3, 2014, с.47 — 53.[schema type=»book» name=»ПРОЕКТИРОВАНИЕ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА СДВИГА ФАЗ» description=»Показана методика проектирования преобразователей угла сдвига фаз между двумя синусоидальными сигналами на основе методов системного анализа и математического моделирования. Построен цифровой микроконтроллерный преобразователь с улучшенными свойствами и характеристиками, подтверждающий высокую эффективность предложенной в работе методики. » author=»Хасцаев Борис Дзамболатович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-01-25″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_31.10.15_10(19)» ebook=»yes» ]