
Рассматривается широкий класс мехатронных устройств (МУ), уравнения динамики которых разрешимы относительно управления на подпространстве. Для этих МУ формулируются критерии обратимости и управляемости и приводятся связанные с ними канонические нелинейные преобразования пространства состояний и управлений МУ. Синтезируются робастные, адаптивные и инвариантные законы управления, обеспечивающие асимптотическую устойчивость и желаемый характер затухания переходных процессов. Приводятся оценки робастности и исследуются условия инвариантности обратимых МУ по отношению к неизвестным параметрическим и внешним возмущениям.
Развитие теории систем управления в условиях неопределённости в приложении к мехатронным устройствам (МУ) требует учёта и формализации специфических свойств нелинейной динамики двигательной системы (ДС) МУ и синтеза законов управления для управляющих систем с новыми типами обратной связи через информационную (сенсорную) систему. Важные результаты в этом направлении получены в теории самонастраивающихся, бинарных и адаптивных систем [1-9]. Излагаемые ниже новые результаты дополняют и развивают, предложенные в [3-11], методы робастного и адаптивного управления обратимыми МУ и динамическими системами в условиях неопределённости.
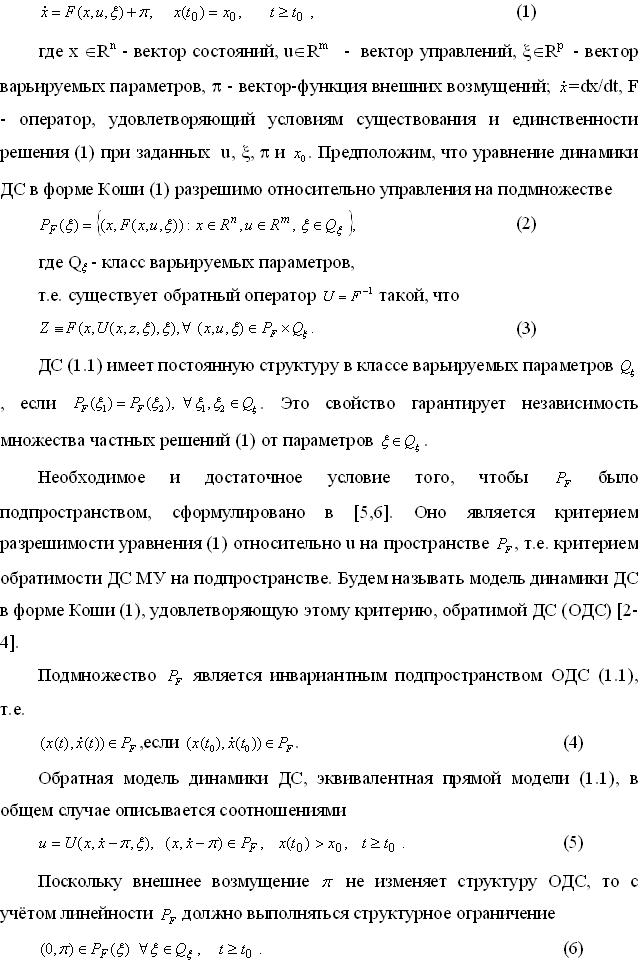
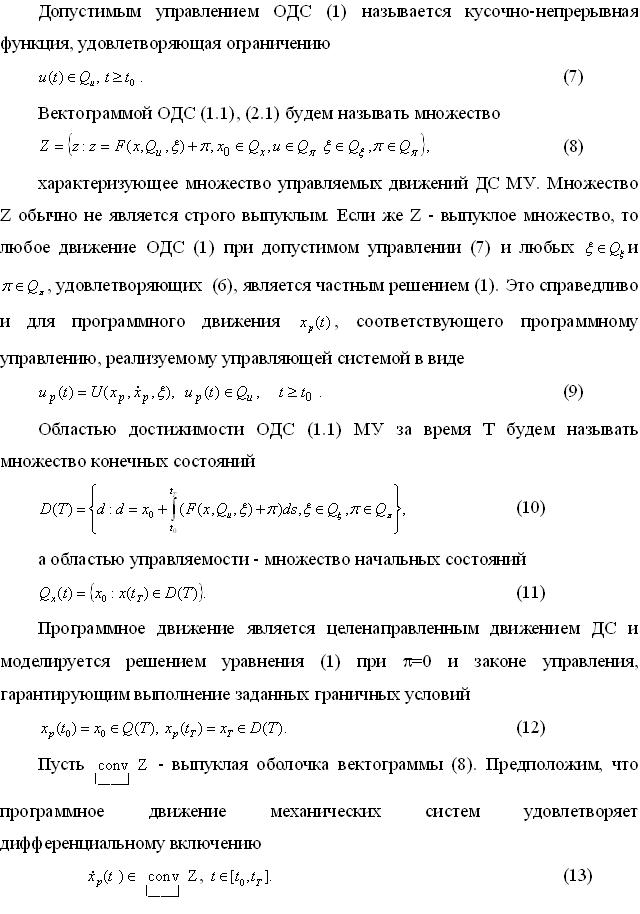
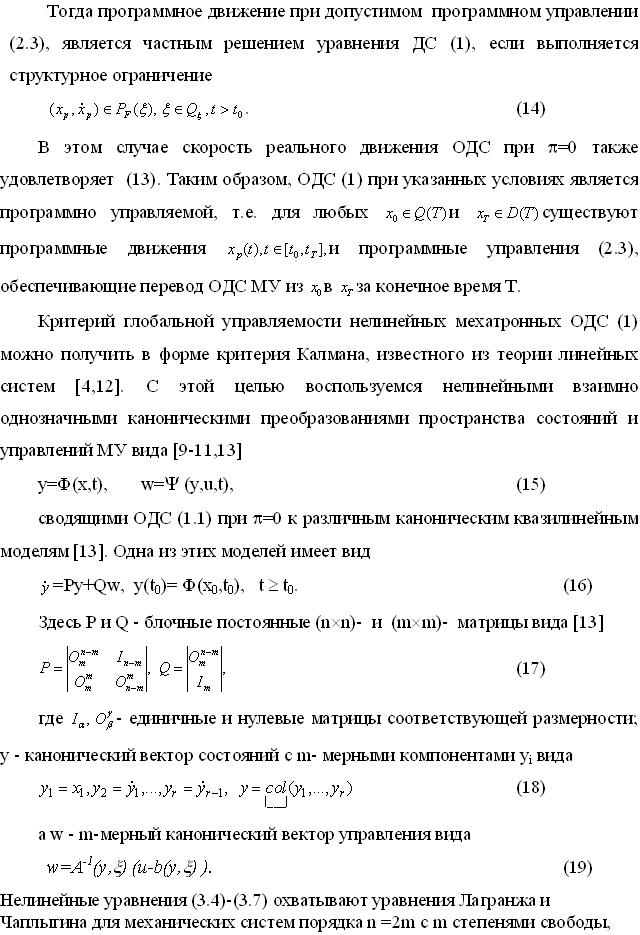
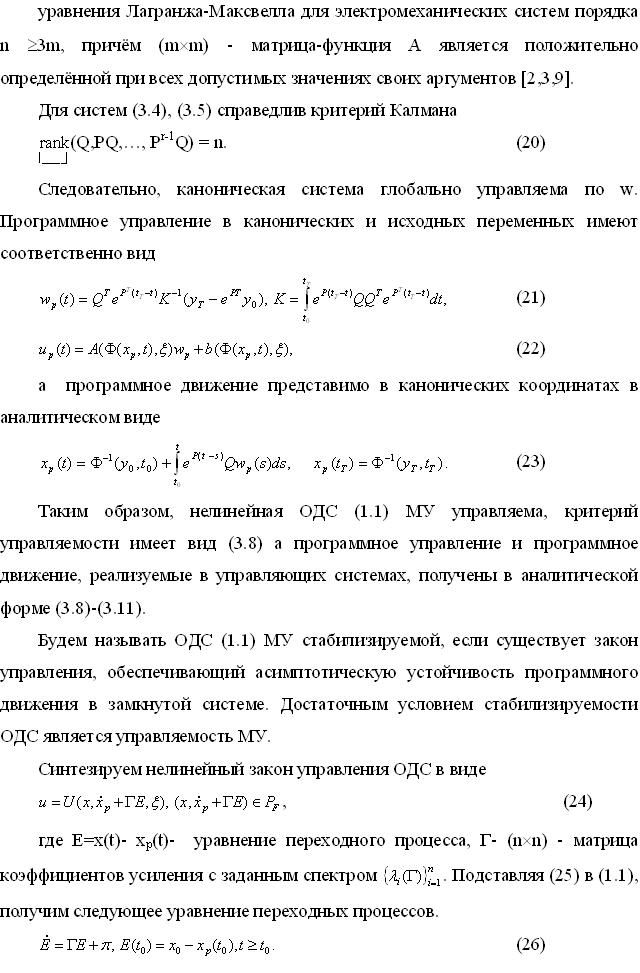
Рассмотрим управляемую ДС МУ, описываемую нелинейным дифференциальным уравнением

Список литературы
- Поспелов Г.С. В сб.: Самонастраивающиеся автоматические системы. – М.: Наука, 1964, с.87-92
- Справочник по теории автоматического управления. – Под ред. А.А.Красовского. М.: Наука, 1987. -712 с.
- Тимофеев А.В. Адаптивная стабилизация программных движений и оценка времени адаптации – Докл. АН СССР,1979, т.248, №3. C.545-549.
- Тимофеев А.В. Построение адаптивных систем управления программным движением. – Л.:Энергия, 1980, 88с.
- Тимофеев А.В. Свойства обратимых моделей динамики и синтез высококачественного робастного управления. – Изв. АH СССР. Техн. кибернетика, 1991, №1. C.45-56
- Тимофеев А.В. Параметрическая оптимизация программных движений и адаптивное терминальное управление. – Докл. АН СССР,1981. T.256, №2. C.310-312.
- Попов Е.П., Тимофеев А.В. Принцип скоростного управления в задаче аналитического синтеза автоматов стабилизации. – Докл. АН СССР 1981, T.256, №5. C.1073-1076
- Попов Е.П., Тимофеев А.В. Управляемость на подпространстве и адаптивные модальные регуляторы. – Докл. АН СССР,1983. T. 273, №5. C. 1073-1076
- Бакурадзе А.М. Синтез адаптивных регуляторов с помощью функций Ляпунова. – Труды Международной конференции «Многопроцессорные, вычислительные и управляющие системы» (МВУС, Дивноморское. 28.09-3.10.2009), с.121-125.
- Зотов Ю.К., Бакурадзе А.М. Управляемость и стабилизация программных движений обратимых механических и электромеханических систем. – Прикладная математика и механика, 2002, T.72. Вып. 4. C.86-95.
- Зотов Ю.К., Бакурадзе А.М. – Методы обратимой динамики управления роботами. – Материалы Международной конференции ИКТМР-2009 МВУС, Дивноморское. 28.09-3.10.2009), с.298-301.[schema type=»book» name=»ОБРАТИМАЯ ДИНАМИКА МЕХАТРОННЫХ СИСТЕМ И МЕТОДЫ СИНТЕЗА МОДАЛЬНЫХ И ИНВАРИАНТНЫХ РЕГУЛЯТОРОВ» author=»А.М.Бакурадзе» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-04-20″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 28.03.2015_03(12)» ebook=»yes» ]