
Одной из существенных потребностей в дефектоскопии является определение точных параметров дефектов особенно в сложных и дорогостоящих объектах исследования, тем более уже находящихся в составе агрегатов, при их производстве или продлении ресурса с целью определения уровня угрозы и возникновения аварийной ситуации. Примером таких объектов исследования могут служить турбины самолетов, электростанций и т.п. объекты транспорта, энергетики и других отраслей, техногенные катастрофы в которых могут привести к существенным потерям. Поэтому при оценке возможности применения вообще или дальнейшего использования объекта исследования требуется не только обнаружение наличия дефекта, но и выявление параметров его формы, точного расположения и характерных особенностей в неоднородностях его материала. Для этого необходимо объёмное (3D) сканирование позволяющее ответить на эти и другие актуальные в дефектоскопии вопросы.
Совершенно очевидно, что для создания объемного изображения внутреннего пространства сканируемого объекта недостаточно одного датчика, как недостаточно одного глаза человеку, чтобы оценить объемную картинку. Следовательно, минимальное количество пьезоэлектрических преобразователей (ПЭП) ультразвукового сканера (УЗС)–два. При этом можно только в одной плоскости определить место расположения неоднородности материала в исследуемом объекте и приблизительно оценить её размеры. Для создания объемного отображения дефекта потребуется как минимум три ПЭП, а для качественного изображения внутреннего пространства объекта исследования необходима антенная решётка с множеством ПЭП.
В стационарных дефектоскопах, используемых, например, при конвейерном или непрерывном производстве, количество ПЭП в УЗС ограничивается только необходимым качеством изображения и конструктивными особенностями объектов исследования. А для мобильных, портативных дефектоскопов накладываются дополнительные массогабаритные ограничения. Значительную помощь в решении этого вопроса может оказать модульная концепция построения многофункциональных систем [3].
Для понимания сути проблемы рассмотрим на рисунке 1 структуру модульного дефектоскопа – томографа (МДСТ), имеющую в своем составе:
- ядро системы – центральное процессорное устройство, обеспечивающее управление и взаимодействие всех устройств (модулей) МДСТ;
- базовые модули системы – устройства обеспечивающие жизнеобеспечение системы – электропитание, ввод и отображение информации, связь с внешними системами;
- функциональные модули – сканеры, выполняющие основные задачи системы – поиск дефектов и определение их параметров;
- внутрисистемная связь – интерфейс для подключения функциональных модулей (сканеров) к системе.
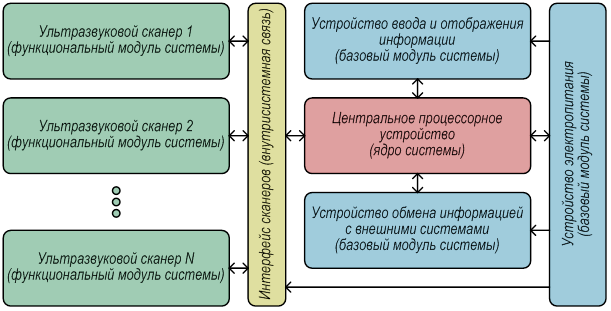
Рисунок 1 – Структура МДСТ
На снижение массогабаритных показателей существенным образом оказывает влияние:
- подключение только одного функционального модуля – сканера, необходимого для проведения текущих измерений;
- отсоединение базовых модулей не участвующих непосредственно в процессе измерения, например устройства обмена информацией с внешними системами;
- использование базовых модулей с пониженными массогабаритными характеристиками, например выносного устройства электропитания вместо аккумуляторного устройства или применение аккумуляторов меньшей емкости за счет оптимального выбора сканера.
Все это весьма легко осуществимо в случае модульного построения системы.
Кроме того модульная концепция построения снижает его ценовые показатели за счет выбора оптимальной схемы комплектации из широкого спектра его функциональных и базовых модулей, т.е. отсутствия аппаратной избыточности. В связи с чем, МДСТ имеет существенную ценовую привлекательность по отношению к его моноблочным аналогам.
Для создания МДСТ применены свойства [2] концепции построения многофункциональных модульных устройств [3] такие как:
- замещение функциональных или базовых модулей, т.е. замещение типов сканеров в МДСТ при смене объекта, а также изменении способа исследования, или замещение типов базовых модулей, вызванного технологической необходимостью;
- идентификация вновь подключенного к МДСТ модуля для его адаптации в систему;
- адаптация в систему вновь подключенного к МДСТ модуля при помощи подключения к нему соответствующего программного драйвера;
- многозадачность, определяемая программным, технологическим и конструктивным обеспечением работы;
- изменяемость конфигурации, являющаяся как следствием замещения, так и подключения/отключения функциональных и базовых модулей;
- преемственность, позволяющая легко и безболезненно производить модернизацию системы;
- автоподстройка всего МДСТ за счет его программного обеспечения вследствие изменений, определяемых свойствами модульной многофункциональной системы.
Перечисленные свойства выгодно выделяют МДСТ на фоне его моноблочных собратьев. В частности преемственность позволяет производить метрологическое перевооружение дефектоскопических лабораторий не как обычно – раз в 10 лет, а осуществлять практически перманентную как программную, так и аппаратную модернизацию.
Кстати, МДСТ присущи и все свойства [2] модульных систем вообще. Например, такие свойства как совместимость и заменимость всех модулей, в том числе и ядра системы, поднимают восстановление работоспособности и ремонтопригодность МДСТ на недостижимую моноблочными устройствами высоту.
Зачастую оператор не способен оценить всю мощь гения создавшего используемое устройство из-за сложности его подготовки к работе. Поэтому в МДСТ наряду с ручным режимом (для особо одаренных операторов) используется полностью автоматический режим настройки и измерений (для рядовых операторов), запускаемый по умолчанию.
Автоматизм работы МДСТ происходит поэтапно следующим образом:
- После включения во время инициализации всех его модулей производится их идентификация для выявления изменений конфигурации и поиска соответствующих драйверов с целью адаптации к ним системы.
- Настройка конфигурации МДСТ в соответствии с набором подключенных к нему функциональных и базовых модулей. Информирование оператора о функциональных возможностях системы, предполагаемых объектах и возможных режимах исследования.
- Определение границ исследуемого объекта, оптимизация временной регулировки чувствительности сканера, выбор критериев и тактики обнаружения.
- Поиск и определение параметров неоднородностей в материале исследуемого объекта. Запись образа дефекта и голосовых комментариев оператора в память МДСТ с привязкой ко времени проведения исследований;
- В соответствии с реальной обстановкой производится выдача рекомендаций оператору при проведении исследований объекта.
Все выше перечисленные действия осуществляются полностью в автоматическом режиме, но возможна и их ручная корректировка.
Особенности работы и структуры сканеров МДСТ следующие. Для первичного обнаружения неоднородности в материале исследуемого объекта и предварительного определения его границ при ненаправленном ультразвуковом излучении достаточно одного мощного передатчика, возбуждающего сразу все ПЭП одновременно. Но для качественного сканирования применимо направленное излучение, при котором фазы ультразвуковых зондирующих импульсов (УЗИ) совпадают в заданном направлении, увеличивая их амплитуду в заданной точке или плоскости за счет свойств интерференции. А прием эхосигнала вообще должен осуществляться только в режиме реального времени и, соответственно, для этого необходим многоканальный приемник. Структура многоканального УЗС, использующего направленное излучение, приведена на рисунке 2.

Рисунок 2 –Структура многоканального УЗС
По команде, поступающей через внутрисистемный интерфейс от центрального процессорного устройства МДСТ, контроллер сканера – КС запускает формирователь характеристики направленности зондирующего импульса – ФХН ЗИ. В свою очередь, ФХН ЗИ генерирует зондирующие импульсы с соответствующим для каждого канала фазовым сдвигом, определяющим суммарное направление излучения. Усилители мощности – УМ ЗИ доводят амплитуду зондирующих импульсов до необходимого уровня и через антенный переключатель – АП подают их для излучения в фазированную антенную решетку пьезоэлектрических преобразователей – ФАР ПЭП. При отражении от неоднородности материала исследуемого объекта принятый ФАР ПЭП эхо-сигнал через АП поступает в приемник прямого усиления с регулируемым коэффициентом усиления – ППУ УКУ для оптимального сжатия динамического диапазона принимаемого сигнала и доведения его до уровня достаточного для детектирования. С выхода амплитудного детектора ППУ УКУ сигнал поступает в аналого-цифровой преобразователь – АЦП для его оцифровывания, а затем в цифровой обработчик сигналов – ЦОС для выделения из него полезной информации. Информация от ЦОС передается в КС для предварительной обработки и корректировки управления каналами передачи-приема, а также через внутрисистемный интерфейс в центральное процессорное устройство МДСТ для последующей прорисовки образов дефектов на экране устройства ввода и отображения информации (см. рисунок 1).
Подводя итоги можно сделать вывод, что описанный МДСТ имеет множество неоспоримых и качественных достоинств и ни одного видимого недостатка.
Показанные на рисунках 1 и 2 структуры в достаточной степени формируют представление о принципах создания МДСТ, но не в полной мере отражают содержимое его отдельных устройств. Дальнейшая детализация особенностей реализации концепции построения многофункциональных модульных систем будет продолжена в последующих статьях.
Список литературы
- Алешин Н.П., Лупачев В.Г. Ультразвуковая дефектоскопия: Справ. пособие. – Мн.: Выш. шк., 1987.- 271 с.: ил.
- Скляр А.В., Мережин Н.И. Основные свойства модульных многофункциональных систем. Евразийский Союз Ученых (ЕСУ). Ежемесячный научный журнал № 4 (13) / 2015, часть 5, с. 41 – 43.
- Скляр А.В., Мережин Н.И. Особенности построения модульных многофункциональных систем. Евразийский Союз Ученых (ЕСУ). Ежемесячный научный журнал № 3 (12) / 2015, часть 5, с. 6 – 8.
- Ультразвук. Маленькая энциклопедия. Глав. Ред. И.П. Голямина. – М.: Советская энциклопедия, 1979.‑400 с., илл.
- Ультразвуковая дефектоскопия. 2-е изд. Выборнов Б.И. М.: Металлургия, 1985, 256 с.[schema type=»book» name=»МОДУЛЬНЫЙ ДЕФЕКТОСКОП – ТОМОГРАФ» description=»В данной статье рассмотрены особенности работы и структура дефектоскопа–томографа, выполненного на основе концепции построения многофункциональных модульных систем, описанной в предыдущих статьях. Кроме того, описана структура и работа входящих в его состав сканеров, созданных на основе антенных решеток.» author=»Скляр Андрей Вадимович, Мережин Николай Иванович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-01-05″ edition=»euroasia-science.ru_29-30.12.2015_12(21)» ebook=»yes» ]