
Описание исследуемых электроприводов
Структурная схема электропривода приведена на рисунке 1.

Рисунок 1. Структурная схема электропривода
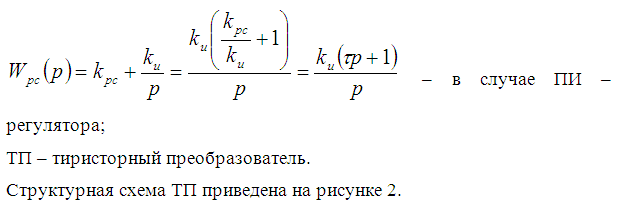
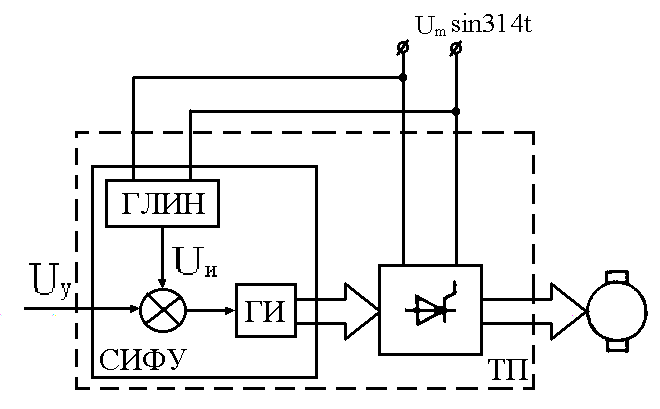
Рисунок 2. Структурная схема ТП
Она состоит из системы импульсно-фазового управления (СИФУ) и силовой части. Назначение СИФУ – преобразование входного непрерывного напряжения управления в угол управления , отсчитываемого от момента естественного отпирания тиристоров.
Силовая часть однофазного полностью управляемого тиристорного преобразователя приведена на рисунок 3.
Рисунок 3. Силовая часть однофазного полностью управляемого тиристорного преобразователя
Временные диаграммы работы ТП в режиме непрерывных токов приведена на рисунке 4.
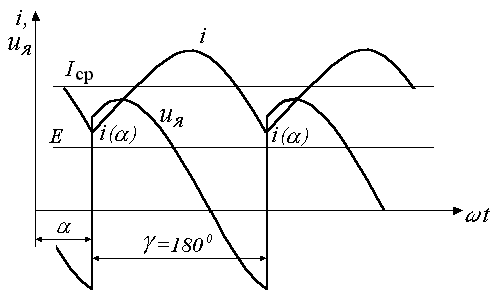
Рисунок 4. Временные диаграммы работы ТП в режиме непрерывных токов
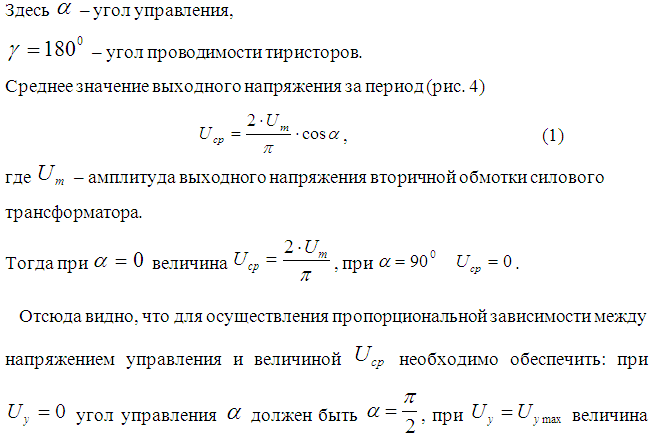

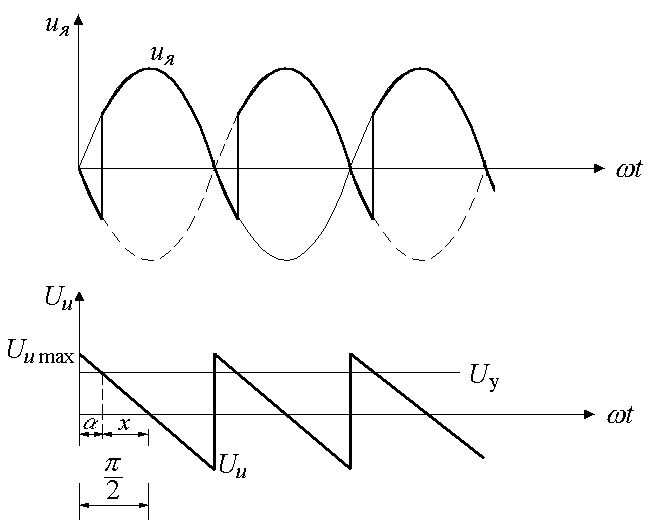
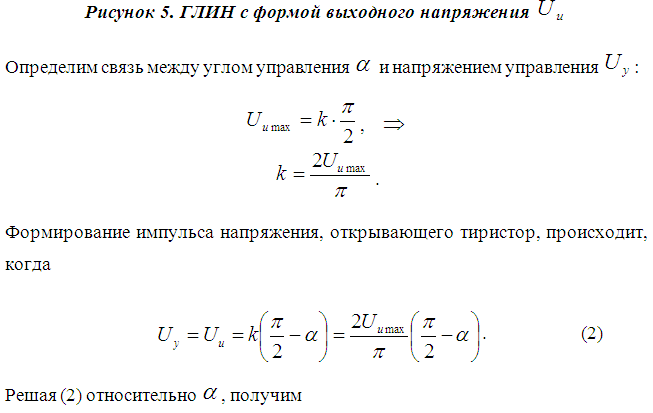
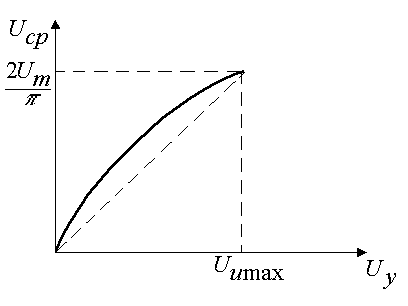
Отсюда видно, что для осуществления пропорциональной зависимости между напряжением управления и величиной необходимо обеспечить: при угол управления должен быть , при величина . Такое соотношение между и можно выполнить применением ГЛИН с формой выходного напряжения , показанной на рисунке 5.
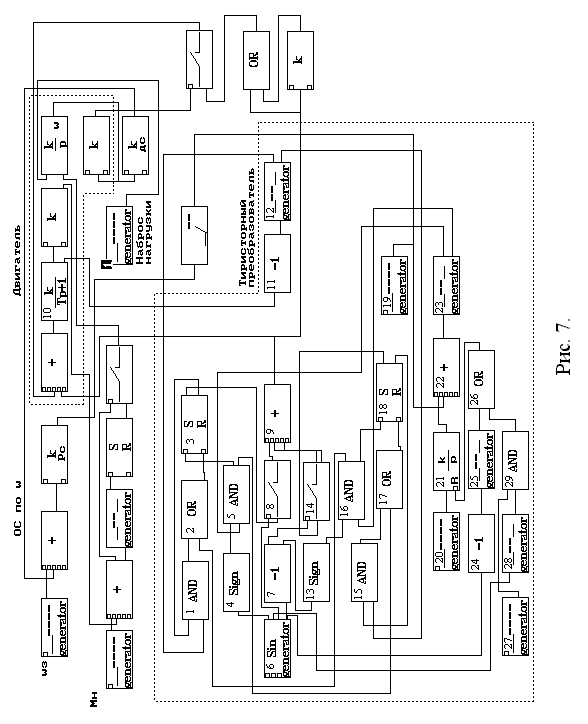
Моделирование исследуемых электроприводов на ЭВМ производится с помощью программного пакета «СИМТЕХ». Структурная схема привода с П – регулятором приведена на рисунке 7.
Временные диаграммы работы блоков модели ТП приведены на рисунке 8.
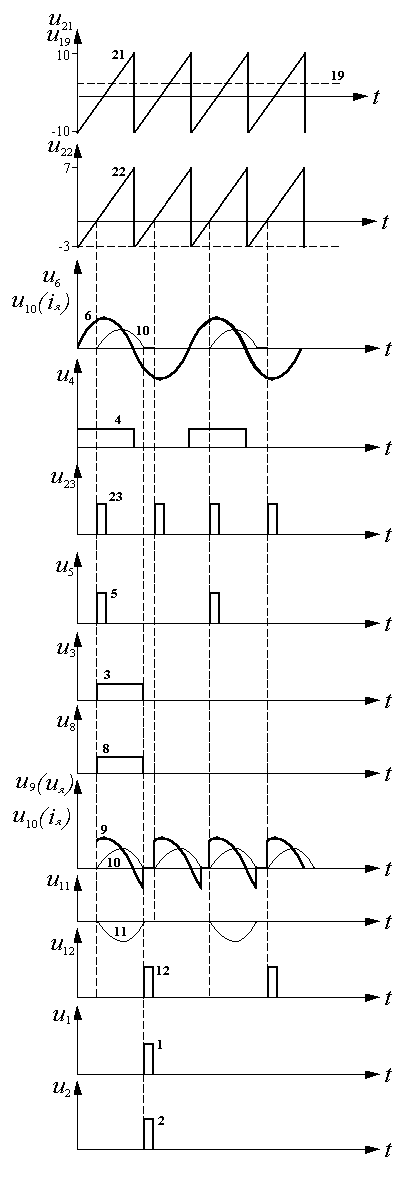
Рисунок 8. Временные диаграммы работы блоков модели ТП
Система импульсно-фазного управления (СИФУ) состоит из блоков 20 – 29. Выходное напряжение генератора линейно изменяющегося напряжения (блок 21) сравнивается с напряжением управления (блок 19) в сумматоре 22, выходной сигнал которого приведен на рисунок 8. Одновибратор 23 формирует короткий импульс в момент перехода входного напряжения из отрицательной области в положительную. Этот импульс поступает на вход элемента И (блок 5). Синусоидальный генератор (блок 6) имитирует вторичную обмотку силового трансформатора, выходное напряжение которого с помощью реле (блок 4) преобразуется в последовательность прямоугольных импульсов (рис. 8). Эти импульсы подаются на второй вход элемента И (блок 5). В момент совпадения входных импульсов на выходе блока 5 формируется импульс, который устанавливает триггер 3 в единичное состояние. Последний замыкает контакты реле 8 через которые напряжение со вторичной обмотки трансформатора (блок 6) подается на якорь двигателя (блок 10). Ток якоря инвертируется блоком 11. В момент перехода напряжения блока 11 из отрицательной области в положительную (он соответствует уменьшению тока якоря до нуля) одновибратор 12 формирует короткий импульс, который подается на первый вход элемента И (блок 1). На второй вход блока 1 поступает выходное напряжение триггера 3. Поскольку оба сигнала находятся в единичном состоянии, на выходе блока 1 формируется импульс, который сбрасывает триггер 3 в нулевое состояние. Последний размыкает контакты реле 8, что соответствует закрытому состоянию тиристоров преобразователя.
Список литературы:
- Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. – М.: Машиностроение, 1990.
- Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высшая школа, 1979.
- Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева.[schema type=»book» name=»МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА С П и ПИ – РЕГУЛЯТОРАМИ СКОРОСТИ И ОДНОФАЗНЫМ ПОЛНОСТЬЮ УПРАВЛЯЕМЫМ ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ» description=»статья предназначена для сравнения применения регуляторов c П и ПИ- регуляторами скорости. ПИ-регулятор является одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это Регулятор с дополнительной интегральной составляющей. И- составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины. Цель работы: изучение принципа действия, статических и динамических свойств тиристорного электропривода CП и ПИ – регуляторами скорости.» author=»Лебедева Валентина Васильевна, Шитик Татьяна Вацлавовна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-01-26″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_31.10.15_10(19)» ebook=»yes» ]