
Интеллектуальное управления робототехническими системами позволяет обеспечить их автономное функционирование в сложно организованных средах [1-3]. Одной из задач при этом является сокращение времени расчета, связанного с определением значения вектора приращений обобщенных координат на каждом шаге расчетов. Указанный вектор приращений вычисляют с учетом обеспечения заданного удаления исполнительного механизма манипулятора от запретных зон [4,5]. В работах [6,7] предложен алгоритм построения движений механизмов манипуляторов основанный на использовании анализа точек конфигурационного пространства, задающих разрешенные и запрещенные конфигурации. Исследованию области L конфигурационного пространства Lq задающей множество разрешенных конфигураций для исполнительного механизма манипулятора мобильного робота «Варан» посвящены работы [8,9]. Запретная зона при этом была задана горизонтальной плоскостью, располагающейся сверху механизма манипулятора мобильного робота (для случая, когда движение осуществляется внутри туннеля).
Положение механизма манипулятора изображенного на рисунке 1аб может быть задано в пространстве Lq точкой. Исследуем область пространства конфигураций Lq, которую обозначим L, определяющую совокупность точек задающих конфигурации, не пересекающие препятствие P и координаты центра выходного звена которых принадлежат зоне q заданной неравенствами:
xо4> 400мм, zо4 > zo1, zо4 > 0 . (1)
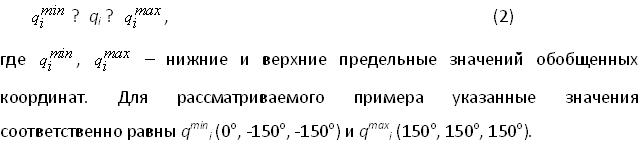
Указанная зона q на рисунке 1а заштрихована с углом 135о и представляет собой объединение трех зон заданных неравенствами (1). Если примем q1 = 0, то размерность пространства конфигураций Lq будет равна трем. Точки пространства Lq при этом будем задавать в узлах сетки с шагом Dqi = 15o. На рисунке 1а показан геометрический смысл параметров xоp и yоp характеризующих взаимное положение манипулятора и запретной зоны P. Положение манипулятора в инерциальной системе координат О0 определяют соответственно координаты xо1 и yо1 задающие начало системы координат O1x1y1. Функционирование механизма манипулятора происходит в пределах ограниченной области W пространства конфигураций Lq .
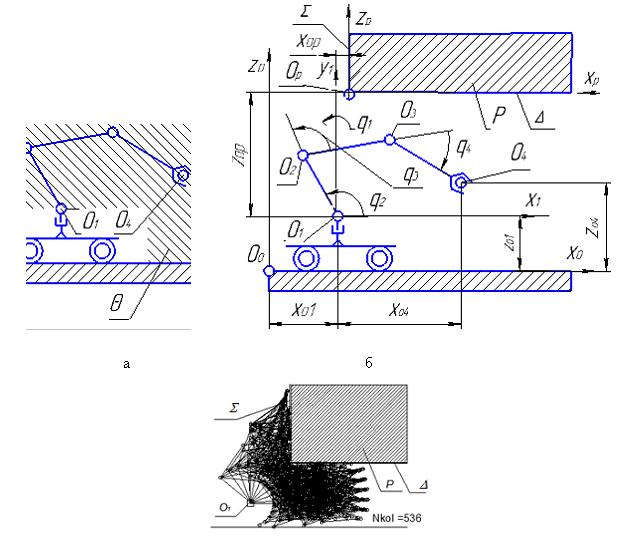
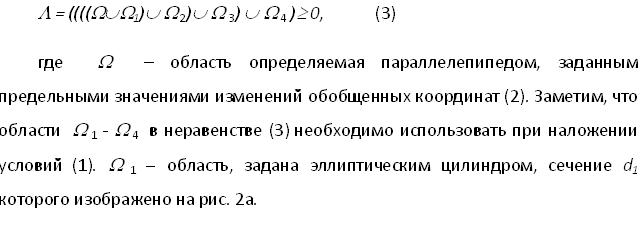
Рис. 1 Конфигурации механизма манипулятора мобильного робота «Варан»: а — изображение зоны q; б – геометрические параметры, определяющие положения конфигураций и запретной зоны; б – изображения множества разрешенных конфигураций
Область W, в общем случае заданная гиперпараллелепипедом, имеет такой вид, что для любого значения вектора q (q1, …, q4) выполняются неравенства (где q1, …, q4 — определяют значения обобщенных координат):
Точки не входящие в область W называют запрещенными [6,7]. Внутри области W могут быть присутствовать так же точки, задающие запрещенные конфигурации, при которых происходит взаимное пересечение звеньев механизма. Данные точки необходимо вычесть из области W. Запрещенными являются так же конфигурации, которые пересекаются с препятствиями. В условиях известной среды данные конфигурации могут быть заранее вычислены.
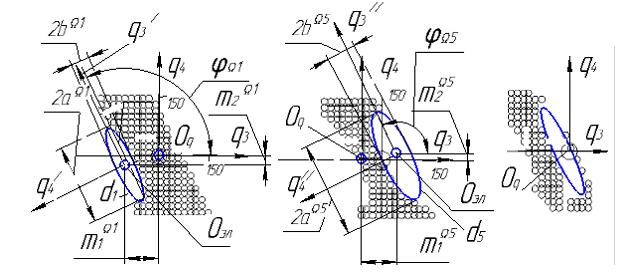
Исследуем положение и форму области L, когда запретная зона Р ограничивается двумя плоскостями S и D, положения которых относительно механизма манипулятора определяют параметрами xop и zop (см. рис. 1aб). Длины звеньев механизма манипулятора примем равными следующим значениям O1O2 = 900 мм, O2O3 = 700 мм и O3O4 = 500 мм. На рисунке 1в изображено множество разрешенных конфигураций при наличии запретной зоны Р при значении параметров xop = 500мм и zop = 500мм. Параметр Nkol на рисунке 1в задает количество указанных конфигураций. Определим сечения области L по алгоритму, изложенному в работе [8]. На рисунке 2абв представлены различные сечения области L, определяющей разрешенные конфигурации для трех различных случаев. На рисунке 2а изображено одно из сечений области L при отсутствии запретной зоны Р, соответствующее значению q2 =40o. Аналитический способ задания области L для этого случая рассмотрен в работе [8]. Область L определится на основе использования операций теории множеств [10]:
а б в
Рис. 2 – Сечения области L: а) сечения при q2 = 40o и отсутствии запретной зоны Р, б) сечения при q2 = 40o и наличии запретной зоны Р заданной в виде горизонтальной плоскости уровня уор =80; в) сечения при q2 = -60o и наличии запретной зоны Р заданной в виде прямоугольника уор =80, xop = 50,
lp =400, hp=50
где m — число плоскостей ограничивающих область L (для рассматриваемого примера m = 3), l = 3 — параметр определяет размерность пространства конфигураций при q1 = 0; d11, d12, …, dlm, b1, b2, …, bm – коэффициенты, определяемые координатами точек располагающихся на сечениях. Данные точки определяют на сечениях области L экспериментальным путем. Использование неравенства (3) позволяет определять принадлежность точек пространства Lq области L и находить разрешенные и запрещенные конфигурации механизма манипулятора. Для вычисления области L заданной неравенством (3) используют операцию конъюнкции, которая определяют следующим выражением [10]:
![]() , (7)
, (7)
где X1 и X2 – непрерывные переменные R-функции (4,6). Подставляя последовательно неравенства (4,6) в уравнение (7) получим неравенство задающее область L при отсутствии запретной зоны.
На рисунке 2б представлено сечение области L при наличии запретной области Р, заданной горизонтальной плоскостью уровня. Данный случай отражает движение мобильного робота внутри тоннеля. Анализ сечений показывает, что запрещенные конфигурации, которые пересекаю запретную зону в пространстве LQ , определяются точками, принадлежащими эллиптическому цилиндру и параболическому цилиндру, которые соответственно обозначим W 5 и W 6. В аналитическом виде, на основе использования теории множеств, в этом случае область L задается неравенствами на основе использования операций пересечения:
На рис. 2в представлено сечение области когда запретная зона Р задана двумя плоскостями D и S (см. рис. 1аб). Анализ сечений области L в этом случае показывает, что запрещенные конфигурации задаются точками, располагающимися внутри области определяемой кинематической поверхностью. При этом образующей поверхности является эллипс, который изменяет форму. Начальные положения центров эллипсов и длины большой и малой полуосей при этом изменяются в зависимости от параметров xop , zop и q2.
Использование соотношений (1-11) позволяет вычислять в приближенном виде запрещенные конфигурации при нахождении механизма манипулятора мобильного робота в непосредственной близости от заранее известных запретных зон. На рисунке 5 представлены графики t = f1(k) и tL = f2(k) определяющие зависимость времени вычисления разрешенных конфигураций при использовании двух различных способов расчета. При проведении исследований использовался компьютер на базе процессора Dual Core Intel Core I3-540, оперативная память DDR3 4 Гб, видеоадаптер дискретный Zotac GeForce GTX 560 с объемом памяти 2Гб. Параметр k определяет число итераций при вычислении разрешенных конфигураций при синтезе движений по вектору скоростей. Данный параметр используется при вычислении вектора обобщенных скоростей при наличии двигательной избыточности [5]. Первый способ соответствующий графику tL = f2(k) основан на использовании неравенств (4-11) определяющих область L. Второй способ t = f1(k) основан на определении пересечений трехмерных примитивов задающих звенья механизмов с запретной зоной. Как видно из графиков функций первый способ расчета разрешенных конфигураций требует на несколько порядков меньше времени вычислений, чем второй.
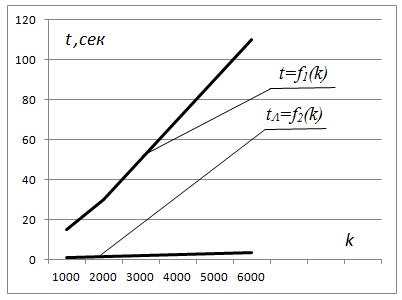
Рис. 5. — Графики-зависимости tL = f2(k) и t = f1(k)
Проведенные исследования показывают, что расчет пересечений исполнительного механизма заданного набором пространственных примитивов и заранее известных запретных зон в реальном масштабе времени, требует значительных затрат на время вычислений. Результаты исследований могут решить указанную проблему. Использование соотношений (4-11) позволяет значительно сократить указанное время вычислений. Это связано с тем, что определяется лишь принадлежность точек пространства Lq расчитанным заранее областям L. Полученные аналитические зависимости могут быть использованы как составная часть интеллектуальных систем управления, которые позволяют планировать траектории перемещения манипуляторов в заранее известном сложно организованном пространстве, с целью обеспечения автономного функционирования роботов.
Литература
- Ющенко, А. С. Интеллектуальное планирование в деятельности роботов / Ющенко А. С. // Мехатроника, автоматизация, управление. 2005. №3. — С. 5 —
- Макаров, И. М. Интеллектуальные робототехнические системы: принципы построения и примеры реализации. Часть 1/ И. М. Макаров, В. М. Лохин, С. В. Манько, М. П. Романов, Д. В. Евстигнеев, А. В. Семенов // Мехатроника, автоматизация, управление. 2004. №11. — С. 14 —
- Зенкевич, С. Л. Управление роботами. Основы управления манипуляционными робототехническими системами / С. Л. Зенкевич, А. С. Ющенко. – М. : МВТУ, 2000. – 400 с.
- Isto P. A parallel motion planner for systems with many degrees of freedom // Proc. of the 10th Intemat. Conf. on Advanced Robotics (ICAR 2001), August 22—25, 2001, Hotel Mercure Buda, Budapest, Hungary. pp. 339—344.
- Притыкин, Ф. Н. Виртуальное моделирование движений роботов, имеющих различную структуру кинематических цепей : монография / Ф. Н. Притыкин ; ОмГТУ – Омск : Изд-во ОмГТУ, 2014. – 172 с.
- Lopatin P. K. Algorithm of a manipulator movement amidst unknown obstacles // Proc. of the 10th International Conference on Advanced Robotics (ICAR 2001). August 22—25. 2001. Hotel Mer- cure Buda, Budapest, Hungary. pp. 327—331.
- Егоров, А. С. Использование алгоритма полиномиальной аппроксимации в задаче управления манипулятором в среде с неизвестными препятствиями / А. С. Егоров, П. К. Лопатин // Мехатроника, автоматизация, управление. — — №3. — С. 24-29.
- Притыкин, Ф.Н. Исследование областей пространства конфигураций, задающих совокупность достижимых точек рабочей зоны манипулятора с учетом положения запретных зон/ Ф. Н. Притыкин, А.Ю. Осадчий // Омский научный вестник. — — № 3 (133). — С. 70 — 74.
- Притыкин, Ф.Н. Исследование областей, задающих множества разрешенных конфигураций при нахождении механизма мобильного манипулятора в близости от запретных зон / Ф. Н. Притыкин, Д. И. Нефедов, А.В. Рингельман // Инженерный вестник Дона, 2015 – № 2. Часть 2,
- Рвачев, В. Л. Методы алгебры логики в математической физике / В. Л. Рвачев. – Киев; 1974. – 256 с.[schema type=»book» name=»АНАЛИТИЧЕСКОЕ ОПИСАНИЕ ОБЛАСТИ, ЗАДАЮЩЕЙ МНОЖЕСТВО РАЗРЕШЕННЫХ КОНФИГУРАЦИЙ МЕХАНИЗМА МОБИЛЬНОГО МАНИПУЛЯТОРА С УЧЕТОМ ПОЛОЖЕНИЯ ЗАПРЕТНЫХ ЗОН» description=»Исследованы области пространства конфигураций, задающих совокупность достижимых точек рабочей зоны манипулятора с учетом положения запретных зон. Для аналитического задания областей использована теория множеств и совокупность поверхностей второго порядка.» author=»Притыкин Федор Николаевич, Осадчий Андрей Юрьевич, Нефедов Дмитрий Игоревич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-01-25″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_31.10.15_10(19)» ebook=»yes» ]