
Большая часть механизмов и агрегатов современного производства это многодвигательные электрически или механически взаимосвязанные системы электропривода. В сравнении с однодвигательными аналогами многодвигательное решение имеет ряд значительных преимуществ. Например, увеличение производительности, точность и быстродействие выполняемых операций за счет снижения массогабаритных и инерционных показателей, повышение надежности путем резервирования вышедших из строя отдельных элементов электромеханической системы.
К сожалению, данное техническое решение также имеет существенный недостаток, а именно — неидентичность механических характеристик электродвигателей одного типа и серии. Как следствие, при работе на общую нагрузку формируется дисбаланс моментов и токов, т.е. неравномерное распределения общей нагрузки между двигателями в статических и динамических режимах работы.
Несогласованная работа приводов в электромеханической системе механизма становится причиной перегрузки электродвигателей с более жесткой механической характеристикой, а значит и к нагреву электрических машин и механических компонентов, дополнительным нагрузкам вибрационного и колебательного характера, увеличению износа механической составляющей и в дальнейшем аварийному выходу из технологического цикла промышленного оборудования.
Нужно отметить, что в теории электропривода рассмотренные особенности хорошо изучены, соответственно были разработаны и внедрены методы выравнивания дисбаланса нагрузок между приводами многодвигательных механизмов. Например, введение специальных схем подключения и дополнительных сопротивлений в электрические схемы электродвигателей постоянного и переменного тока [1].
С появлением и широким внедрением в производство частотно – регулируемого электропривода картина теоретического обоснования процессов формирования дисбаланса моментов между приводами механически взаимосвязанного многодвигательного электропривода, работающего на общую нагрузку, кардинально поменялась. В работе системы механически взаимосвязанного многодвигательного электропривода, оснащенного микропроцессорной поддержкой, векторными системой управления, обратными связями по скорости, току, моменту и т.д. уже не соблюдаются известные принципы в распределении нагрузки между приводами в зависимости от коэффициентов жесткости электрических машин, как это принято в классическом электроприводе.
![]() (1)
(1)
где — ω – результирующая скорость вращения, рад/с;
ω1, ω2 – угловая скорость вращения, рад/с;
М, М1, М2 – общий момент и моменты электродвигателей, Н*м;
β1, β2 — жесткости механических характеристик, Н*м*с;
Результаты исследований данной проблемы показали, что процесс формирование дисбаланса моментов и рассогласования в работе частотно регулируемого многодвигательного электропривода зависит не только от электромагнитных параметров электрических машин, но и от целого комплекса других причин. Например, настройки параметров контроллера скорости (рампы разгона), наличие зазорообразования, ударных и вибрационных нагрузок в момент старта и во время переходного процесса и т.д. [2]. Таким образом, внедрение в производство современных систем автоматизированного частотно – регулируемого электропривода не гарантирует заявленных производителем данного оборудования высоких показателей быстродействия и качества работы для технологического оборудования, т.к. характеристики механизмов будут в этом случае определяться не техническими возможностями электропривода, а степенью взаимного влияния электрической и механической частей друг на друга.
Исходя из сказанного выше, можно сделать вывод, что работоспособность машин и механизмов, спроектированных без учета особенностей применения частотно – регулируемых систем в многодвигательном механически взаимосвязанном электроприводе, в реальных условиях эксплуатации оказывается ограниченной. В процессе проектирования или в ходе пусконаладочных работ может возникнуть необходимость определения ряда электромеханических параметров, но в большинстве случае проведение тестов и экспериментов на реальном объекте в процесс наладки опасно, а порой и невозможно, исходя из требований производства и техники безопасности. Особенно это касается крупных многодвигательных механизмов, производство которых является индивидуальным или мелкосерийным.
Учитывая вышеизложенное, проектирование и наладку электромеханических многодвигательных систем целесообразно производить комбинированными способами, сущность которых заключается в сочетании современных методов имитационного моделирования и результатов экспериментов, полученных на исследовательских стендах [3]. При этом, в процессе исследований на стендах в типовых режимах могут быть определены параметры электромеханических систем, которые получить расчетным путем практически невозможно: упругости механических связей, фактические жесткости механических характеристик и т.д.
Озвученный комбинированный способ был испытан на практике при разработке индивидуальных систем выравнивания нагрузок для литейных кранов грузоподъёмностью 420 тонн в конверторном цехе АО «АрселорМиттал Темиртау». Экспериментальные исследования выполнялась на испытательном стенде, собранном на базе отделения непрерывной разливки стали (ОНРС) конверторного цеха «АрселорМиттал Темиртау» [4].
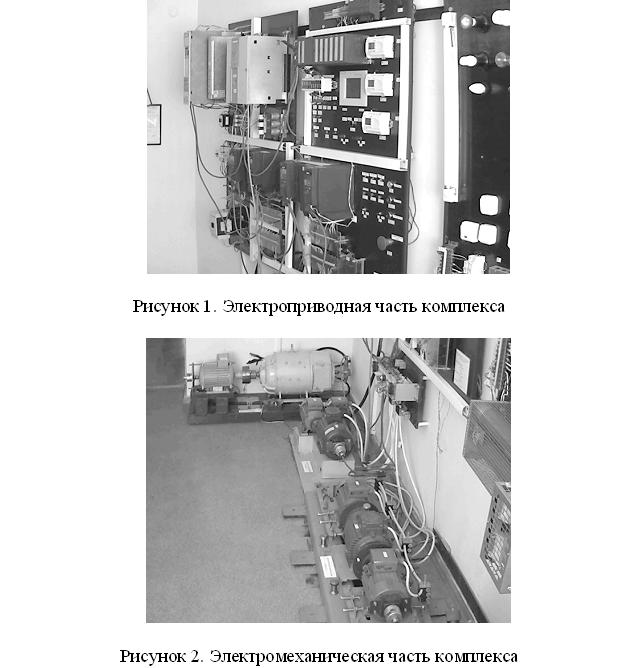
Развитием данного направления экспериментальных исследований стала разработка научно – исследовательского комплекса (НИК) на базе Карагандинского государственного индустриального университета [5]. Особенностью данного стенда является наличие в его структуре практически всех уровней автоматизации, взаимная интеграция этих уровней, как на аппаратном, так и программном уровне. В качестве программно аппаратной основы стенда была выбрана продукция фирмы SIEMENS. В соответствии с рисунками 1 и 2 основой системы управления НИК является программируемый логический контроллер серии SIMATIC S7 – 300. Электромеханическая часть состоит из преобразователей MICROMASTER, SINAMICS, SIMOVERT MASTER DRIVES VC, SIMOREG DC, асинхронных электродвигателей и двигателей постоянного тока. Для визуализации и управления широко были использованы возможности интернет технологий и SCADA систем WinCC и WinCCflexible, что позволило организовать дистанционное и локальное управление (панель оператора ОР177) лабораторным оборудованием комплекса. Обмен данными между уровнями организован с помощью шины данных PROFIBUS.
Технические возможности исследовательского комплекса позволяют проведение работ по определению статических, динамических, энергетических характеристик частотного электропривода с различными структурами и параметрами систем управления, а также решать вопросы наладки приводов, имеющих упругие связи и зазоры. В случаях, при отсутствии адекватной модели, например, таких сложных систем, как многодвигательный частотный привод грузоподъемных механизмов, НИК позволяет обеспечить в полном объеме моделирование этого объекта и рабочего процесса, в котором он задействован.
Комплекс также может быть использован в качестве контрольно-испытательной станции для дефектовки и проверки частотных преобразователей и асинхронных электродвигателей. Кроме этого на стендах НИК проводится комплексное обучение, и выполняются лабораторные работы студентов по специальностям «Автоматизация и управление» и «Электроэнергетика».
Список литературы:
- Ключев В.И. Теория электропривода. М.: Энергоатомиздат, 2001г.- 704с.
- Брейдо И.В. Гурушкин А.В. Исследование принципов распределения нагрузок в электромеханических системах с многодвигательным частотно управляемым электроприводом. М.: Приводная техника №3, 2009.
- Брейдо И.В. Гурушкин А.В. Комбинированные методы проектирования и наладки двухдвигательного частотно – управляемого асинхронного электропривода. М.: Приводная техника №2, 2009.
- Брейдо И.В. Гурушкин А.В. Разработка систем выравнивания нагрузок для многодвигательного частотно – управляемого электропривода механизма главного подъема литейных кранов металлургического производства. М.: Приводная техника №6, 2009.
- Гурушкин А.В., Доля А.В. Разработка лабораторно – исследовательского стенда на базе многодвигательного частотно – управляемого асинхронного электропривода, Темиртау.: Вестник Карагандинского государственного индустриального университета №3(6), 2014.[schema type=»book» name=»ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ИЗУЧЕНИЯ МНОГОДВИГАТЕЛЬНЫХ ЧАСТОТНО –УПРАВЛЯЕМЫХ СИСТЕМ ЭЛЕКТРОПРИВОДА С ПРИМЕНЕНИЕМ НАУЧНО — ИССЛЕДОВАТЕЛЬСКИХ СТЕНДОВ» description=»Представлена информация о применении исследовательских стендов в процессе проектирования и наладки электромеханических систем с многодвигательным частотно – управляемым электроприводом.» author=»Гурушкин Артем Владимирович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-27″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.04.2015_4(13)» ebook=»yes» ]