
К числу современных технологических процессов, сокращающих трудоемкость обработки металлических материалов, относится электрохимическая обработка (ЭХО) заготовок и деталей в токопроводящем растворе (электролите).
Особенностью управления процессом размерной ЭХО является сложность объекта управления, представляющего собой совокупность электрохимической ячейки, источника питания, электролитного агрегата и других устройств, связанных единством цели управления и взаимным влиянием. Вследствие этого возникает необходимость контролировать сразу несколько параметров: общий технологический ток, напряжение на электродах электрохимической ячейки, локальная плотность тока, минимальный торцовый зазор, удельную электропроводность межэлектродной среды на выходе из электрохимической ячейки, расход, давление, концентрацию, pH электролита.
Решение задачи создания системы управления таким многопараметрическим процессом во многом определяется качеством предварительного моделирования всей системы, включая объект управления.
На рисунке 1 представлена общая структура системы управления ЭХО.
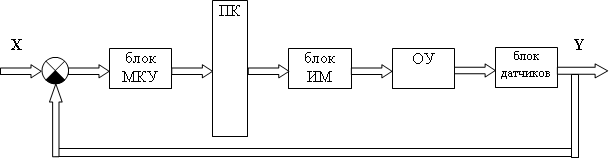
Рисунок 1. Общая структурная схема системы управления ЭХО
На рисунке 1 приняты следующие обозначения:
блок МКУ – блок микроконтроллерного управления, количество микроконтроллеров равно количеству управляемых параметров;
ПК – компьютер;
блок ИМ – блок исполнительных механизмов (электромеханическая система перемещения электрода, управляемый источник тока, электрогидравлический насос для подачи электролита и др.)
ОУ – объект управления (включает электрические и механические параметры пары изделие-электрод, гидродинамические параметры электролита и др.);
блок датчиков – включает датчики зазора, тока, давления и др.;
X – вектор входных заданных параметров процесса ЭХО;
Y – вектор выходных измеренных параметров процесса ЭХО;
В статье предлагается аппаратно-программная модель системы управления процессом ЭХО, предназначенная для экспериментальных исследований в реальном времени. Функционально реально-виртуальная модель системы управления представляет собой комплекс, состоящий из блока управления, построенного на основе платформы Arduino Mega-2560, и компьютерного стенда для моделирования процесса ЭХО (рис. 2).

Рисунок 2. Блок-схема реально-виртуальной модели системы управления
В данном случае предлагается комбинированный метод создания системы управления, который подразумевает использование и компьютерной модели объекта управления, созданной на базе программы Matlab, и платы Arduino с микроконтроллером ATMega-2560. Модель разрабатывается в программной среде Matlab 2013, так как данная версия включает пакет Simulink Support Package for Arduino Hardware. Этот пакет позволяет использовать среду визуального программирования Simulink для программирования микроконтроллера ATMega-2560.
Чтобы записать Simulink-модель блока управления (БУ) в виде программы в микроконтроллер AtMega-2560 платформы Arduino Mega-2560 необходимо Simulink-модель БУ дополнить блоками связи с внешней средой из пакета Support Package for Arduino Hardware. В результате общая схема управления одним каналом ЭХО приобретет вид модели, представленной на рисунке 3.
Связь платформы Arduino и компьютера с пакетом Simulink осуществляется посредством кабеля USB. Для записи программы в память микроконтроллера AtMega-2560 необходимо произвести запуск модели из меню Tools/…/Run [1, с. 19].

Рисунок 3. Simulink-модель блока управления для одного канала
Затем вход блоков Analog Input платы Arduino (вывод 4) необходимо подключить к аналоговому выходу интерфейсной платы PCI-1710HGU (блок Analog Output пакета Real-Time Windows Target), а выход PWM (вывод 5 широко-импульсного модулятора) – подключить к аналоговому входу платы PCI-1710HGU (блок Analog Input пакета Real-Time Windows Target) [2, с.19]. В результате получим схему, представленную на рисунке 4, которая состоит из Simulink-моделей исполнительного механизма и объекта управления и аппаратного блока управления, построенного на платформе Arduino-Mega2560. После всех этих действий реально-виртуальная схема готова к моделированию.
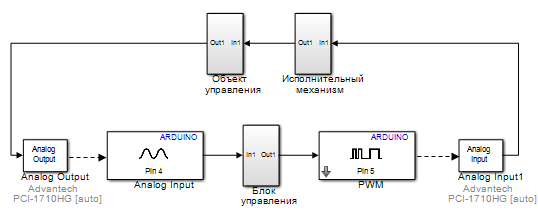
Рисунок 4. Реально-виртуальная модель системы управления ЭХО для одного канала для одного канала
Полученная аппаратно-программная модель позволяет отрабатывать алгоритмы управления, настраивать параметры Блока управления и исследовать различные режимы работы системы электрохимическим формообразованием в реальном времени с помощью пакета Simulink программной среды Matlab и функциональных возможностей платформы Arduino Mega-2560. При этом наряду с виртуальными измерительными приборами можно использовать и реальные, например, цифровой осциллограф.
Список литературы:
- Соммер У. Программирование микроконтроллерах плат Arduino /Freeduino. – СПб.: БХВ-Петербург, 2012. –256 с.
- Таранчук, В. Б. Основные функции систем компьютерной алгебры: пособие для студентов факультета прикладной математики и информатики – Минск: БГУ, 2013. – 59 с.[schema type=»book» name=»МОДЕЛИРОВАНИЕ МНОГОПАРАМЕТРИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОХИМИЧЕСКИМ ФОРМООБРАЗОВАНИЕМ НА БАЗЕ ПЛАТФОРМЫ ARDUINO MEGA 2560 В РЕАЛЬНОМ ФОРМАТЕ ВРЕМЕНИ» description=»Рассмотрена задача моделирования многопараметрической системы управления электрохимическим формообразованием на базе платформы Arduino Mega-2560 с использованием программных возможностей пакета реального времени системы Matlab. » author=»Ивель Виктор Петрович, Герасимова Юлия Викторовна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-02-02″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_26.09.15_10(18)» ebook=»yes» ]