
УДК….
Модель фактора аварийности ходовой навигационной вахты
Кукуи Фирмин Дживо
Кандидат технических наук, Ведущий инженер управления
по транспортной логистике ООО «Газпром нефть шельф»
Аннотация: Из анализа морских аварий и катастроф, произошедших за последние годы, следует, что большинство этих аварий произошло вследствие «человеческого фактора». Все более очевидным становится необходимость учета всех разновидностей факторов, определяющих поведение «человеческого элемента» при несении ходовой навигационной вахты. В статье рассматриваются причины и особенности появления навигационных аварий в районах со стесненными навигационными условиями. Описаны мероприятия, которые необходимо ходовой навигационной вахте проводить для обеспечения безопасного плавания в таких районах. Разработана математическая модель аварийного состояния технологии управления эксплуатацией судна. Для разработки данной модели использованы, общеизвестны в теории вероятности и математической статистике методы. Показано, что модели эволюции состояний, составленные
в рамках ассоциативно-структурного подхода, и модель их взаимосвязи способны обеспечить как расчет показателя надежности при эксплуатации судна, так и прогнозирование эффективности вложения средств в СУБ этого судна. Кроме того, использование эволюционных диаграмм может способствовать выработке эффективных мер по профилактике аварийности и минимизации последствий аварий.
Ключевые слова: фактор аварийности, математическая модель, человеческий фактор, управление эксплуатацией судна, технология управления, граф аварийности.
ACCIDENT FACTOR MODEL OF THE NAVIGATIONAL WATCHKEEPING
Kukui Firmin Dzhivo
Candidat of technical sciences, Leading engineer
of transport logistics Department LLC “Gazprom neft shelf”
Abstract: from the analysis of marine accidents and catastrophes that have occurred in recent years, it follows that most of these accidents occurred due to the «human factor». The need to take into account all kinds of factors governing the behavior of the «human element» when performing a navigational watch is becoming more evident. The article deals with the causes and features of the occurrence of navigation accidents in areas with congested navigation conditions. Describes the activities that must be carried out by the navigational watch to ensure safe navigation in such areas. A mathematical model of the emergency state of the ship operation control technology is developed. For the development of this model, well-known in the theory of probability and mathematical statistics methods are used. It is shown that the state evolution models composed of within the framework of the associative-structural approach, and the model of their relationship can provide both the calculation of reliability in the operation of the vessel, and forecasting the effectiveness of investments in the SMS (safety management system) of this vessel. In addition, the use of evolutionary diagram can contribute to the development of effective measures to prevent accidents and minimize the consequences of accidents.
Keywords: accident factor, mathematical factor, human factor, ship’s operation control, technology management, count of accident.
Введение
Аварийность морских судов определяется объективной реальностью, которая обусловлена внешними и внутрисудовыми факторами, которые сопутствуют процессам мореплавания. Аварийность морских судов всегда будет иметь место и не зависеть от человека. Полное искоренение аварийности судов, к сожалению, невозможно. Однако вполне допустимо оказывать влияние на состояние аварийности с помощью всевозможных практических мероприятий и даже достичь ее существенного снижения до некоторого уровня на какой-то достаточно ограниченный временной период. Снижение аварийности возможно, но только до определенного уровня, после чего она способна снова к росту или, в лучшем случае, к временной стабилизации на каком-то количественном показателе с небольшими отклонениями в большую или меньшую сторону. При этом положительный результат борьбы с аварийностью должен предполагать достижение ее приемлемого уровня (с допустимым материальным ущербом), а также стабилизацию аварийности на некотором интервале времени [8], [2].
Уровень аварийности и материальный ущерб от нее, как правило, не находятся только в прямой зависимости, поскольку, в некоторых случаях, они могут быть связаны между собой и обратно пропорционально. Такая неопределенность материального ущерба не позволяет использовать ее в качестве параметра, способного обеспечить решение задачи по определению тенденций состояний аварийности морских судов. В результате ежегодного сравнения абсолютных показателей роста или сокращения материального ущерба можно получить лишь представление о существующей аварийности на морском транспорте. Истинные тенденции можно определить лишь по значениям относительной аварийности, которые численно равны отношению всех аварийных случаев за рассматриваемый период к общему количеству судов, которые эксплуатировались компанией или государством флага.
Аварийность судов зачастую влечет за собой человеческие жертвы [2]. Поэтому, несмотря на отсутствие каких-либо гарантий при снижении аварийности, судоходные компании должны проводить постоянную борьбу с причинами, порождающими аварийность. Это продиктовано в первую очередь производственными, моральными и этическими нормами, разработанными самой компанией. Если в результате управления безопасной эксплуатацией судов компании удается в какой-то мере снизить если не количество аварийных случаев, то хотя бы тяжесть последствий от них, то такое управление состоянием безопасной эксплуатацией судов уже можно признать отвечающим глобальной цели [1] которая поставлена перед морской общественностью Международной Морской Организацией (ИМО).
Цель данной работы – описание причин и особенности появления навигационных аварий на морских судах. Также разработка модели аварийного состояния
технологии управления эксплуатацией судна.
- Описание причин и особенностей появления навигационных аварий на морских судах.
Плавание судна и особенно в стесненных водах является одним из наиболее сложных видов навигации. Этот вид навигации характеризуется близостью судна к надводным и подводным морским навигационным опасностям, резким изменением глубин, извилистостью фарватера, канала или другого судоходного пути, быстрыми изменениями окружающей обстановки, а также ограничениями, накладываемыми на скорость, осадку и маневрирование судна. Поэтому во время плавания в районе со стесненными условиями на мостике должен находиться капитан или, по его указанию, старший помощник капитана. Тщательное изучение района и детальная проработка предварительной прокладки при подготовке к плаванию в районе со стесненными условиями и на подходе к порту должны обеспечить быстрый и надежный контроль перемещения и маневрирования судна во время плавания.
При подходе к району со стесненными условиями плавания по решению капитана вахта может быть усилена. В этот период:
– устанавливается повышенная готовность главного двигателя к изменению режима его работы (маневренный режим) и назначается безопасная, для данных условий, скорость судна;
– управление рулем переводится в режим ручного управления;
– якоря готовятся к немедленной отдаче;
– проверяется работоспособность звуковой и световой сигнализации, исправность навигационных огней и знаков, предписанных МППСС–72 и местными правилами;
– включается эхолот, и его показания сравниваются с глубиной на морской навигационной карте;
– включаются и опробуются РЛС, системы и приборы ответственные за обеспечение безопасности мореплавания;
– на ленте курсографа наносится отметка времени;
– УКВ радиостанция настраивается на дежурный канал, а при необходимости проводится оповещение встречных судов;
– определяется место положения судна одним из наиболее точных способов;
– заблаговременно устанавливается радиосвязь с лоцманской станцией, при этом уточняют место и время встречи лоцмана, а в районе действия системы управления (регулирования) движением судов подают заявку на проводку.
Плавание судна в районе со стесненными условиями должно осуществляться в строгом соответствии с предварительной прокладкой, при этом фактический путь судна должен совпадать с линиями рекомендованных курсов и створов, проходить на безопасных расстояниях от всех подводных и надводных опасностей. При плавании в районе со стесненными условиями (особенно в шхерах) должны быть обеспечены:
– наблюдение за окружающей обстановкой;
– надежная управляемость судна;
– непрерывное тщательное счисление пути и точный учет всех факторов, влияющих на движение судна;
– точное и быстрое определение места судна выбранными способами с необходимой частотой;
– контроль счисления пути судна с учетом ограждающих изолиний;
– своевременность и точность выполнения всех поворотов и необходимых остановок судна;
– строгое выполнение установленных правил плавания в районе.
Для ориентирования во время плавания в стесненных условиях рекомендуется иметь непосредственно на ходовом мостике карты с указанием курсов плавания, ограждающих изолиний, расчетного времени плавания по каждому курсу и других необходимых дополнительных сведений. Поворот на новый курс в районе со стесненными условиями должен осуществляться с учетом влияния внешних физических и морфологических факторов, а так, же маневренных качеств судна. Приход судна в начальную точку поворота проверяется по обсервациям, продолжительности плавания на прямолинейном участке пути (по секундомеру), секущим (поворотным) пеленгам или ограждающей дистанции и знакам ограждения. Переход судна на новый курс подтверждается показаниями гироскопического и магнитного компасов.
Надежное безопасное плавание в стесненных условиях обеспечивается:
– правильным опознаванием ориентиров и знаков ограждения (характеристика огня определяется по секундомеру);
– учетом элементов течения и дрейфа при циркуляциях;
– учетом глубины под килем судна;
– учетом запаса глубины на ветровое волнение;
– выбором безопасной скорости хода, при которой сохраняется надежная управляемость судна и одновременно исключается «проседание» судна больше допустимого значения при данной глубине района и образование «попутной» волны.
Присутствие лоцмана не освобождает капитана от необходимости изучения, и знания района плавания, ведения графического счисления пути и определения места судна по навигационным ориентирам. Кроме того, капитан следит за окружающей обстановкой, контролирует правильность рекомендованных лоцманом курсов и команд по изменению скорости судна. В случае неправильных действий лоцмана капитан может отстранить его от проводки судна и в дальнейшем осуществлять ее самостоятельно или потребовать замены лоцмана.
Плавание по фарватеру под проводкой службы управления (регулирования) движением судов так же не освобождает капитана от ведения счисления пути судна, и определения его места. При плавании под проводкой службы управления (регулирования) движением судов с капитана не снимается ответственности за безопасность навигации.
Плавание на рейдах и в гаванях, а так, же вблизи плавучих доков, должно осуществляться со скоростью, которая установлена портовыми властями и закреплена в местных правилах. Такая скорость способна обеспечивать безопасную управляемость судну с учетом мелководья и присасывания судна к береговым сооружениям.
Если при ухудшении видимости обеспечение безопасности плавания в районе стесненных вод становится невозможным, то судну следует стать на якорь вне фарватера. Если возникают сомнения относительно местоположения судна, то необходимо застопорить энергетическую установку, и принять меры к надежному определению текущего места.
В настоящее время безопасное плавание судна стесненных водах регулируется рамками следующих правил:
– Международной конвенцией по подготовке дипломированию и несению вахты 1978/ 95 (ПДНВ–78/95);
– Международными правилами предупреждения столкновений судов в море, 1972 г. (МППСС–72);
– Рекомендациями и наставлениями по организации штурманской службы на судах компании;
– проверочным листом СУБ компании, определяющим правила плавания в узкости, вблизи навигационных опасностей, при заходах/выходах из порта.
Перечисленные нормативные документы позволяют составить и предложить к использованию норму HS, которая должна определять все действия штурманской вахты [10, 3, 6]. Формально эту норму можно записать так:
![]() (1)
(1)
где MP – МППСС–72; RS – рекомендации или наставление по организации штурманской службы на судне; PL – проверочный лист.
Абсолютное большинство навигационных аварийных случаев, так или иначе, связаны с нарушениями нормы HS. Эти нарушения определяются неудовлетворительной организацией штурманской службы на мостике судна, нарушением и невыполнением судовыми специалистами правил и требований в части «безопасного плавания судов в районе со стесненными условиями, подхода к порту, выхода из порта». Вследствие нарушения нормы плавания происходят навалы на причальные и другие гидротехнические сооружения, столкновения с судами или плавающими объектами, посадки на грунт.
2. Модель аварийного состояния технологии управления эксплуатацией судна
Модель аварийного состояния технологии управления представим
с помощью направленного графа переходов со структурой дерева вида
G2 (P, V), где P – вершины; V – ребра графа (рис. 1). Исходные вершины эволюционной диаграммы (графа) G2 (P, V) соответствуют состояниям нормального функционирования подсистем, которые обеспечивают реализацию технологического процесса управления эксплуатацией судна. Так, состояние нормального функционирования подсистемы «человеческий элемент» соответствует вершине P1, подсистемы технических средств – вершине P3, подсистемы организационных средств – вершине P5, а вершины направленного графа P7 и P10 отражают состояния нормального функционирования средств технической и организационной диагностики организационно-технической системы.
Ребра v ∈ V графа G2 (P, V), представленные на рис. 1 в виде сплошных линий, фиксируют направленные переходы подсистем, обеспечивающих реализацию технологии управления, из состояния в состояние. Управленческой ошибке «человеческого элемента» соответствует вершина P2, отказу технических средств – вершина P4, сбою организационных средств –
вершина P6. Вершины направленного графа P8, P9, P11, P12 соответствуют состояниям средств диагностики при фиксации ложных или скрытых отказов и сбоев в технической и организационной подсистемах соответственно. Действительно, с точки зрения последствий отказов судовых технических средств и сбоев в организации несения вахты в технологии управления TUG целесообразно рассматривать только скрытые и ложные отказы. При этом под скрытыми техническими отказами и организационными сбоями следует понимать события, при которых ни средства технической диагностики,
ни организационные контрольные мероприятия не парируют эти события.
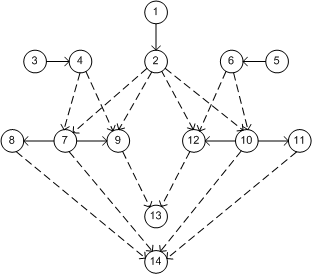
Рис. 1. Граф аварийности
Кроме того, ложными отказами и ложными сбоями необходимо считать самопроизвольно вырабатываемые сигналы об отказах и сбоях при нормальной работе подсистем организационно-технической системы.
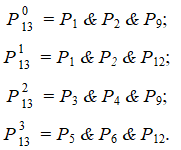
Ребра ν ∈ V направленного графа G2(P, V) в виде пунктирных линий показывают эволюцию состояния при наличии ошибок «человеческого элемента», скрытых или ложных отказов и сбоев технических или организационных средств. Конечными вершинами эволюционной диаграммы
являются вершины P13 и P14, которые определяют конечные состояния
аварийности технологического процесса управления. Пусть в случайные моменты совершает ошибки «человеческий элемент», а средства диаг-
ностики обнаруживают ложные или скрытые отказы и сбои в технической
и организационной подсистемах. Тогда, учитывая, что критическая ситуация на судне, фиксируемая состоянием P14, будет складываться лишь в случае подачи сигнала о ложных отказах и сбоях, а также при парировании средствами технической или организационной диагностики скрытых отказов
и сбоев, модель такой ситуации можно представить следующим образом:
P14 = P P P P P P, (2) (4.26)
где каждая компонента является монотонной цепочкой переходов вида

Состояние технологии управления TUG, классифицируемое как аварийное (вершина направленного графа P13) , определяется ошибками «человеческого элемента», отказами или сбоями технической или организационной подсистемы, а также отказами средств диагностики. Модель аварийной технологии управления TUG, которая складывается на судне, можно записать так:
P13 = P P P P, (3) (4.27)
где каждая компонента является монотонной цепочкой переходов вида
Введенные ранее допущения и описания моделей (2), (3)
позволяют получить общее представление о трех основных состояниях,
которые могут сложиться в СУБ при реализации технологии поддержания безопасной эксплуатации судна, и составить модель взаимосвязи этих состояний. Модель взаимосвязи эксплуатационного, критического и аварийного состояний технологии TUG можно представить в виде направленного графа с циклической структурой вида G3(S, W), где S – вершины графа; W – его ребра (рис. 2).
Основным состоянием, отвечающим условиям безопасной реализации технологии управления, является эксплуатационное состояние TUG, соответствующее вершине графа S1. В этом состоянии действие факторов опасности незначительно и сбалансировано действиями СУБ судна на стадиях профилактики и предупреждения аварийности. Устойчивость эксплуатационного состояния S1 в модели взаимосвязи представлена циклом в вершине графа (рис. 2).
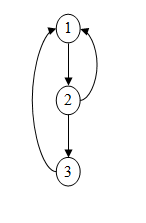
Рис. 2. Граф взаимосвязи состояний технологии TUG
Если действие факторов опасности создает реальную угрозу безопасной реализации технологии управления и не может быть сбалансировано действиями СУБ судна на стадиях профилактики и предупреждения, возникает неустойчивое критическое состояние, соответствующее вершине графа S2. Это состояние явно неустойчиво, поскольку, с одной стороны, способно при принятии чрезвычайных организационно-технических мер вернуться в устойчивое эксплуатационное состояние S1, с другой – если принятые меры будут неадекватны действию факторов опасности, перейти в аварийное состояние (вершина графа S3).
Заключение
Аварийное состояние технологии управления TUG характеризуется истинным или кажущимся нарушением технологии управления или отказами отдельных ее элементов. При кажущемся нарушении функционирования или кажущемся отказе элемента технологии управления возможно возвращение ее состояния в эксплуатационное состояние. При истинном отказе элемента или истинном нарушении технологического процесса управления аварийное состояние необратимо. Свойство необратимости и устойчивости истинного аварийного состояния в эволюционной модели взаимосвязи представлено циклом при вершине графа S3.
При истинном аварийном состоянии технологии управления система управления безопасностью обязана реагировать на разрушительное действие опасных факторов, но лишь так, чтобы локализовать, а затем – минимизировать его последствия. Модели эволюции состояний, составленные
в рамках ассоциативно-структурного подхода, и модель их взаимосвязи способны обеспечить как расчет показателя надежности при эксплуатации судна, так и прогнозирование эффективности вложения средств в СУБ этого судна. Кроме того, использование эволюционных диаграмм может способствовать выработке эффективных мер по профилактике аварийности и минимизации последствий аварий.
Список используемой литературы.
1. Использование ассоциативно-структурного подхода при описании аварийной ситуации и вариантов ее развития / С.В. Помахо, А.Ж. Смирнов, В.И. Меньшиков // Вестн. МГТУ: Труды Мурман. Гос. техн. Ун-т. 2011. Т.14. № 4. С.737 – 739.
2.Катенин В.А. Навигационно-гидрографическое и гидрометеорологическое обеспечение судовождения на внутренних водных путях. СПБ. : Элмор. 2011. 614 с.
3.Катенин В. А., Дмитриев В. И.. Навигационное обеспечение судовождения. М : Академкнига, 2006. 372 с.
4.Кодекс международных стандартов и рекомендуемой практики расследования аварии или инцидента на море (Кодеекс расследования аварий) (Принят Резолюцией КБМ от 16.05.2008 N MSC.255(84)).
5.Кодекс проведения расследования аварий и инцидентов на море – Code for investigation of marine casualties and incidents. СПБ.: ЗАО ЦНИИМФ, 1998. 112с («судовладельцам и капитанам и капитанам»), вып.№ 10). Принятая 20-й Ассамблеей Международной морской
6.Кукуи Ф.Д., Скороходов Д.А., К вопросу об обеспечении безопасности судна судоводителем. Научный журнал «Наука и транспорт». 2012. №2. С – 30 – 33.
7.Кукуи Ф. Д. Модель и механизм побуждения к реализации безопасных технологий при эксплуатации судов компании // Морские интеллектуальные технологии. 2016. Т. 1. № 1 (31). С. 49 – 53.
8.Михальский В. А. Оптимальные методы и способы морской навигации. Л.: 1991. 244с.
9.Основные процессы в структурах безопасной эксплуатации судна / Ф. Д. Кукуи, Н. А. Анисимов, А.А. Анисимов / под общ ред В. И. Меньшикова. Мурманск. : Изд-во МГТУ, 2008. 185 с.
10.Проблемы безопасного мореплавания в сложных навигационных условиях стесненных вод / В. И. Меньшиков, А. Н. Суслов, В. В. Шутов / под общ. ред. В. И. Меньшикова. Мурманск. : Изд-во МГТУ, 2013. 186 с.
11. Резолюция ИМО А.849 (20) принятая 27 ноября 1997 г.