
Технологический прогресс в области медицины, сегодня изменил хирургическую практику. Лапароскопическая и роботизированные хирургические методы доказали бесспорым образом свои преимущества перед традиционной хирургией.
Благодаря своей небольшой травматичности, отличному виду операционного поля, минимальной до отсутствующей боли в послеоперационном периоде и хорошему косметическому эффекту, они становятся все более широко используемыми для лечения многих заболеваний. [1, с. 6-16], [2, с. 21-41],[3, с. 334-340]
После первой лапароскопической радикальной гистерэктомии по Canis и др., отмечается начало минимально инвазивной хирургии в лечении злокачественных онкогинекологических заболеваний.
К сожалению, однако, обычная лапароскопия имеет некоторые недостатки, которые являются предпосылкой того, что методика усваивается труднее при более длительном периоде времени и требует создания определенных координационных умений. Характер лапароскопических инструментов предполагает снижение тактильных ощущений. и парадоксальные движения.
Тремор рук усиливается к их дистальным концам, а эффекторная часть инструментов с ограничеными движениями. Монитор воспроизводит операционное поле в двух измерениях, что связано с изменением координации обратной связи «глаз-рука». В большинстве случаев хирург работает в недостаточном эргономическом положении и среде. Все эти обстоятельства, взятые вместе, образуют непреодолимый барьер перед начинающим лапароскопистом, особенно в тех случаях, когда вам необходимо выполнить радикальные лапароскопические операции, а это, в свою очередь, является условием для целого ряда проблем во время анестезии и хирургического вмешательства.
В отличие от лапароскопической хирургии, роботизированные хирургические системы преодолевают большую часть недостатков классической лапароскопии. «Руки» робота имеют семь степеней свободы движения, аналогичные человеческой руке, электронное управление делает их более точными и устраняет естественный тремор. По сравнению с человеческой рукой, которая способна выполнять 180 ° движений каждый рычаг робота да Винчи исполняет 540 ° -вые движения и обеспечивает больше движений со стороны хирурга. Он работает с комфортом в эргономичной среде, сидя за пультом робота, как наблюдаемые изображения на мониторе являются трехмерными. Все это создает предпосылки для меньшего числа осложнений как внутри-, так и после операции. Значительно снижает вероятность возникновения потери крови во время операции, более слабые послеоперационные боли , что связано с более короткой госпитализацией и снижение затрат для медицинских учреждений и системы медицинского страхования.
Исторические записки.
Роботизированная хирургия.
С самого начала хирургические роботы созданы, для того чтобы расширить возможности хирургов за пределами традиционной хирургии. (Nezhat C. и колл., 2006) [4, с. 2620-2622 ]. Это приводит к так называемой дистанционной хирургиий т. е. хирургии на расстоянии (также известной как telesurgery), т.е. это способность врача, выполнить операцию пациенту, хотя они не находятся на одном и том же месте. По сути это форма телеприсутствия (Tele Presence).
История робототехники в хирургии начинается с создания 560 робота Puma, робот который использовался в 1985 году Kwoh-мом и его коллегами для выполнения с большей точностью нейрохирургических биопсий . (Рис.1) [5, с. 614-621], [6, с. 34-40], [7, с. 153-161].
Рис. 1. Роботизированная система PUMA 560
Три года спустя, Дэвис и его команда выполняют трансуретральную резекцию простаты с помощью Puma 560. (Davies и колл., 2000) Эта система в конечном счете, ведёт в 1988 году к разработке Probot, робот разработанный специально для трансуретральной резекции предстательной железы, разработанного в Imperial, Collegs Лондон [8, с.129-140], [9, с. 317-325] (Рисунок 2).

Рис. 2. Роботизированная система ProBot

Рис. 3. Роботизированная система AESOP
В 1990 году впервые одобрен FDA робот для лапароскопической хирургии, и представляет собой автоматизированную систему эндоскопа для оптимального позиционирования (AESOP) — (рис. 3). В 1992 году создаётся и ROBODOC, разработанный Integreated Surgical Systems. Эта система предназначена для тазобедренных операций и замены тазобедренного сустава (рис. 4). (Satava и др., 2002) [1, с. 6-16].
Рис. 4. Роботизированная система ROBODOC
Ещё с середины до конца 1980-х годов, группа исследователей из NASA приступили к разработке робототехнических устройств для использования в космических полетах, известные как «робо — устройства » управляемые дистанционно. Из этой технологии появляется т. наз. «Виртуальная реальность», которая позволяет взаимодействие с трехмерными виртуальными экранами. В начале 1990-х годов, несколько ученых из НАСА присоединяются к команде в Стэнфордском исследовательском институте (SRI). Они создали называнный ими «телеманипулатор» для хирургии сосудов и нервов на руке. Министерство обороны США позже признал, что применение робототехники и «виртуальной реальности» могли бы обеспечить лечение пострадавших на поле боя.
Через применение «виртуальной реальности» раненый может быть «приведен» к хирургу (Tele Presence).Посредством этой концепции, хирург, который находится на большом расстоянии от пациента может выполнить операцию раненому солдату оставшему на поле боя.
Первый хирургический робот-асисстированная лапароскопическая холецистэктомия была проведена в 1997 году Jaques Himpens и Guy Gardier в Брюсселе — Бельгия. (Himpens и др., 1998) [10, с. 681-690].
07.09.2001 г. была сделана первая трансатлантическая роботизированная холецистэктомия роботом Zeus французским хирургом Jacqes Marescaux и его командой IRCAD-а. (Рис. 5)
Рис. 5. Роботизированная система ZEUS
Оперативная группа расположена в Нью-Йорк, а 68 летная пациентка, которой была проведена операция в Страсбурге, Франция (Marescaux и др, 2002). Операция называется «Операция Линдберг,» названная именем Северо — Американского авиатора Чарльза Линдберга, который совершил первый успешный трансатлантический перелет между 20-21.05. 1927 [11, с. 379-380].
Впервые в Болгарии онкогинекологическая роботизированная хирургия была выполнена роботом da Vinci S в клинике «Онкогинекология» к Университетской больнице «Д-р Г. Странский» г. Плевны. Операция осуществляется командой Чл. кор. Профессора доктора Грегория Горчева д.м.н., женщине с диагнозом рак шейки матки. С 2007 года до сих пор в отделении «Онкогинекологии», совершенны посредством этой роботизированной системой более 800 операций на больных со злокачественными гинекологическими заболеваниями. (Рис. 6)

Рис. 6. Роботизированная система da Vinci Si
Лапароскопическая хирургия.
С древних времен люди стремились собрать информацию о различных заболеваниях путем осмотра естественных отверстий в теле, как ухо, рот, влагалище и другие.В начале это осуществлялось путем прямого осмотра невооруженным глазом, а позже с другими, хотя и примитивными приспособлениями.Первые подобные устройства со времени Гиппократа (460-377 до н.э.), который описывает расширитель и аноскоп при лечении геморроя. (Рис.7)
 Рис. 7. Аноскоп
Рис. 7. Аноскоп
Маразаумел (257 г. до н.э.) описывает устройство, называемое „Сизоферт”, который представляет свинцово зеркальный сифон с изогнутым наконечником и деревянной трубкой для дренажа.Исторической поворотной точкой для эндоскопии является конструирование Philipp-ом Bozzini во Франкфурте аппарата, который он назвал «Lichtleiter» – световод. (Рис. 8)

Рис. 8. «Lichtleiter»
Развитие опытов просмотра полости продолжилось и в следующих десятилетиях, как в 1939 году Янош Верес (Janós Veress) создает иглу для безопасного прокола грудной клетки при пневмотораксе и туберкулезе, которая впоследствии была использована в качестве инструмента для достижения пневмоперитонеума.В 1955 году К. Semm и Р. Fikentscher разработали первый автоматический газ — инсуфлятор для трубной инсуффляции СО2. К. Semm является и первым, который выполнил лапароскопическую аппендэктомию. [12, с.9-16 ]
Применение лапароскопических и роботизированных хирургических методов.
Минимально инвазивные хирургические методы все более и более находят применение в различных хирургических специальностях, как широко используемые находят в следующих областях: [13, с. 137-67].
Кардиохирургии;
Колоректальной хирургии;
Общей хирургии;
Гинекологической хирургии;
Нейрохирургии;
Торакальной хирургии;
Урологии;
Бариатрической хирургии.
Причина этого кроется в многочисленных преимуществах, которые они предоставляют.
Преимущества роботизированной и лапароскопической хирургии.
Роботизированная и лапароскопическая хирургия предлагает множество преимуществ для пациентов по сравнению с открытым (конвенционалным) доступом хирургического вмешательства. Более существенные сводятся к следующему:
Более короткое пребывание в стационаре;
Уменьшение боли и дискомфорт в послеоперационном периоде;
Короткое время восстановления и возвращения к нормальной жизни;
Малые разрезы, что приводит к снижению риска инфектирования;
Снижение потери крови и частоты гемотрансфузий;
Являются с хорошим косметическим эффектом (без серьезных хирургических рубцов).
Несмотря на эти общие для обоих хирургических методах характеристики, в техническом аспекте роботизированная хирургия предоставляет больше возможностей перед лапароскопическим оперативным методом. Это базируется на следующих преимуществах:
1) Отличная визуализация операционного поля.
Видеосистема In Site, с двуобъективной трёхчиповой цифровой камерой, что позволяет хирургу получить трехмерную картину оперативного поля. Система для управления камерой („Navigator“), включает в себя ручной блок управления и педали, которые позволяют движение камеры (вверх / вниз и вправо / влево), увеличивать и уменьшать масштаба объекта и даже возможность виртуального вращения (ротации). Полученная картина может быть увеличена до 12 раз по сравнении с реальным размером.
Изображения, которые оператор наблюдает через 3D-камеру, прикреплёной к четвертой роботизированной руке (манипуляторе) обеспечивают превосходную визуализацию операционного поля. Элемент лучшего изображения, показан на (рис. 9).
Рис. 9. 3D-изображение, наблюдаемое через консоли робота
2) Эргономика.
Хирург работает сидит удобно за пультом, контролируя множество устройств, установленных на трех роботизированных руках (манипуляторах).
3) Улучшение ловкости.
На лицо возможность с 7-степенной свободы движения, напоминающей человеческую руку и до 540 °-вой ротации. Это позволяет быть достижение и до самых маленьких пространствах в человеческом теле, которое не может быть достигнуто без большого размера операционных разрезов. (Рис. 10)

Рис. 10. Endo-Wrist-технология
Движение руки, запястья и пальцев хирурга передается с помощью компьютера с консоли к инструментам, прикрепленных к роботу. (Рис. 11).
Рис. 11. Тонкий контроль работы робота Da Vinci
Имитируемые движения находятся в том же диапазоне, что и движения рук хирурга, что позволяет максимальный контроль. Остальная часть оперативной группы контролирует робота около пациента, который находится на операционном столе.
Самые характерные особенности роботизированной системы Da Vinci:
1) Исключительная точность.
2) Фильтрирует мелкий тремор рук оператора к 6Гц. [14, с. 2-15].
3) Эффективность и низкая травматичность по сравнению со всеми другими используемыми оперативными методами. [15, с. 743-747].
Различия между лапароскопической и роботизированной хирургией.
Существует целый ряд различий между лапароскопической и роботизированной хирургической системах. Известно, что в обычной лапароскопической хирургии необходим помощник, который должен контролировать руку с камерой. Это увеличивает время для выполнения операции. Тем не менее, за последние двe десятилетия онкологии используются ряд минимально инвазивных хирургических методов, целящих снижение заболеваемости при сохранении хирургических результатов. Многие исследования доказывают безопасность лапароскопической радикальной операции для лечения раннего стадия рака. [16, с.334-339] [17, с. 21-24]
Лапароскопический подход обеспечивает долгосрочные результаты по сравнению с открытой радикальной операцией, добавив преимущества, такие как минимальная инвазивность с точки зрения потери крови, минимального обезболевания и короткой госпитализации. Несмотря на все эти преимущества лапароскопическая хирургия не является широко принятой в хирургической практике, вероятно, из-за некоторых из ее недостатков: долгой кривой обучения, двухмерном виде операционного поля, плохое эргономичное положение хирурга, а также ограниченным диапазоном движения инструментов. Эти условия влияют отрицательно на хирургическое изполнение в результате тремора, усталости и последующей уменьшеной точности.
В отличие от ней, роботизированная хирургия добовляет преимущества, такие как возможность масштабирования наблюдаемого изображения, фильтрация тремора, удобный интерфейс, отсутствие эффекта «точка опоры» , а «запястье» (Endo-Wrist-технологии) в конце хирургического инструмента с большим диапазоном движения, чем у человеческой руки. (Рис. 12) [18, с. 310-329], [19, с. 34-40].
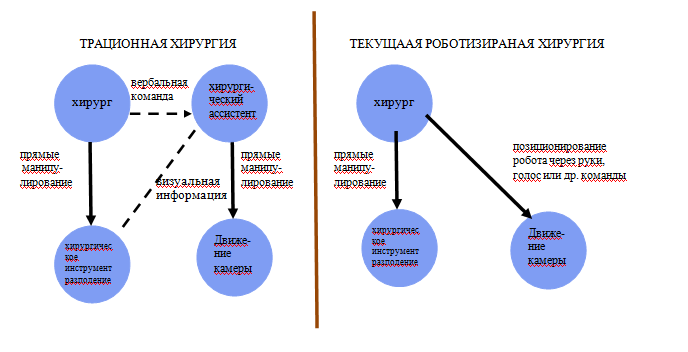
Рис. 12. Технические различия между лапароскопской и роботизированной хирургией. [18, с. 310-329].
Несмотря на сходство между двумя хирургическими методами, существует целый ряд различий между ними. В этом направлении, новые поколения роботизированных хирургических систем дают возможность точного контроля при проведении оперативных вмешательств, благодаря усовершенствованным программным обеспечениям (софтуер). Это делает их альтернативой существующей до сих пор лапароскопии.
Недостатки обоих методов.
Робот Да Винчи имеет ряд предупреждающих звуковых и световых сигналов, которые указывают на наличие неисправности в системе. Он фильтрует мелкий тремор рук хирурга, блокируя любую попытку переместить руки робота. Таким образом, робот да Винчи способен «защитить» пациента от возможных ошибок хирурга.
К сожалению, однако, в настоящее время нет датчиков, которые фиксируют скользящее тело на операционном столе под действием гравитационных сил в крутом положении Тренделенбурга, при котором выполняются этот тип операции. Это оказалось крайне опасно из-за нарушения видимости и пространственных ограничений в операционном зале. Ряд авторов описывают робота метафорически как «мясной крюк» с риском разрыва передней брюшной стенки, сильных болей в послеоперационном периоде, а в более тяжелых случаях может привести к повреждении целости внутренних органов, нервов и сосудов. Чтобы избежать эти опасности, создались множество защитных устройств для операционных столов, которые сводят к минимуму риск этих осложнений.
С целью предотвращения осложнений, описанных до сих пор, в 2008 году ВОЗ с помощью группы международных экспертов создал контрольный список для обеспечения безопасности пациентов, подвергшихся хирургическим процедурам. (Рис. 13) [20]. Цель состоит в том, чтобы усилить принятые практики в области безопасности и способствовать улучшению коммуникации и совместной работы. Лист состоит из трех частей:
- Перед вводного наркоза;
- Перед разрезом кожи;
- Перед тем как пациент покидает операционную [21, с. 491-499].
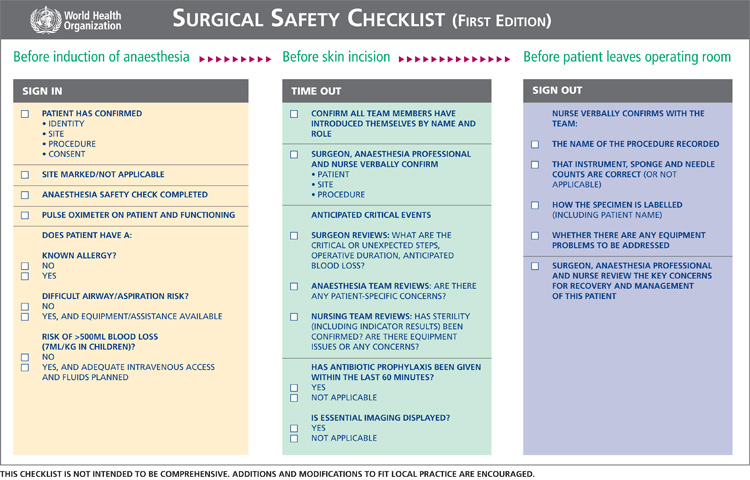
Рис. 13. Хирургичесий чек-лист для безопасности [20]
Риски для пациента во время операции еще более выражены во время роботизированной хирургии, потому что их необходимо проводить в крайней степени положения Тренделенбурга и создания высокого внутрибрюшного давления около 20 мм ртутного столба.
Для того чтобы выявить и, по возможности, предотвратить некоторые из осложнений, связанных с длительностью роботизированных операций, Song J. (2013) предложил второй «second time-out -контрольный лист, который должен быть пополнен от трёх до четырёх часов после начала операции. (Рис. 14) [22, с. 7-19].
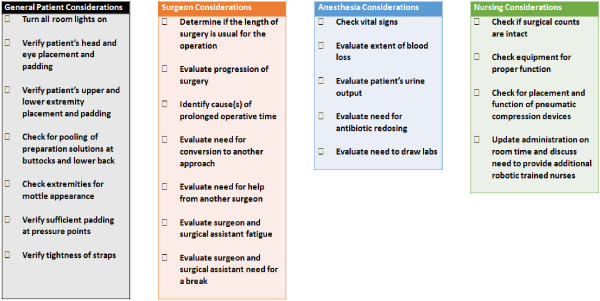
Рис. 14. Второй «second time-out -контрольный чек-лист. [22, с. 7-19]
Этот второй период ожидания предназначен для оценки безопасности пациентов в этой уникальной хирургической среде.
Он состоит из четырех частей:
1) осложнения со стороны пациента.
Проверяется положение тела пациента на операционном столе, с целью предотврашения нервных или другого типа осложнений.
2) Осложнения хирурга.
Второй «тайм-аут» даёт возможность в случае длительной операции установить причины этой длительности, для выбора другого хирургического подхода, для проведения консультации с вторым хирургом или дать короткую паузу для отдыха.
3) Анестезиологические осложнения
При больших по объему роботизированных операциях на лицо большая потеря крови, гипотония, повышение венозного давления, повышенние внутриглазного и внутричерепного давления. Второй период ожидания позволяет оценить потерю крови и создать алгоритм для решения этой проблемы. Создаёт возможность для проведения лабораторных исследований, отчетать диурез и др.
Zanetti G (2001). и Steinberg J. (2009) сообщили, что часто забывается о введении второй дозы антибиотика (только один из пяти случаев). Второй «тайм-аут» чек-лист устраняет этот проблем. [23, с. 828-831] [24, с. 10-16].
4) Сестринские осложнения.
Daniel W (2012) показывает, что 7% хирургических неуспехов из-за неисправности аппаратуры. [25, с. 323-327]. Во втором периоде ожидания даётся возможность операционной медсестре осуществить проверку исправности и режима работы хирургической роботизированной системы.
Еще один из основных недостатков такого рода операции является ее стоимость около одного миллиона долларов, что делает практически невозможным для большинства больниц. Но будет ли цена этой роботизированной системы уменьшаться или увеличиваться является предметом догадок. Некоторые верят, что улучшение технологии и накопление опыта работы роботизированными системами приведет со временем, в конце концов к ее снижению. Другие допускают, что с более усовершествованием технологии, например как увеличение скорости процессора, и более сложное программное обеспечение увеличат стоимость этих устройств. С другой стороны, часто возникают вопросы о проблеме, связанной с обновлением систем и того сколько необходимо больницам и организации здравоохранения потратиться для улучшения и как часто это будет происходить?
Во всяком случае, многие критики считают, что, чтобы оправдать покупку этого хирургического робота, он должен получить широкое междисциплинарное использование .
Важным недостатком обоих операционных методов является размер робототехнических и лапароскопических систем. И последнее, но не в последнюю очередь является большое количество инструментов, которые используются в этом типе хирургии.
Основными компонентами всех поколений да Винчи робота состоит из трех основных частей: (Рис. 15).
Это Консоль — 1, Башня к пациенту — 2 и Башня для визуализации — 3.

Рис. 15. Компоненты роботизированной системы da Vinci
Консоль (консоль) является местом, из которого хирург выполняет фактическую операцию. Она снабжена датчиком безопасности. Хирург сидит за консолью в удобном для него положении, позволяющее максимальную концентрацию. Через консоль он контролирует операционные руки робота и находится в постоянном контакте с оперативной и анестезиологической командами.
Башня к пациенту (patient cart) является элементом системы, на которой расположены четыре «руки» (манипуляторы) робота. Одна рука «держит» оптическую камеру, а остальных трёх расположены инструменты, с помощью которых оперируют. Его руки завернуты в стерильные «рукава» для одноразового потребления. Используются различные типы инструментов, в зависимости от конкретной операции. Endo-wrist (эндо-запястье) технология, интегрирована в роботизированную систему, обеспечивает большую свободу и точность движений инструментов и возможность оперировать в труднодоступных местах.
Башня изображения (vision cart) содержит источники света и системы управления оптической камерой. К этой части робота связаны консоль, мониторы в зале и архивирующая компьютерная система. Благодаря этому единству отдельных компонентов становится возможным передача трехмерного изображения операционного поля оператору и его помощникам. Существует возможность передачи изображения на большие расстояния.
Вывод:
Оба минимально инвазивных хирургических метода (лапароскопический и роботизированный), дают возможность точности при выполнении медицинской, хирургической услуге. Роботизированную хирургию, однако, можно рассматривать как усовершенствованную лапароскопическую технику. Различие между ними связано с тем ,что хирургические роботы являются с автономным питанием и они компьютерно контролируемые устройства, которые могут быть запрограммированы для помощи позиционирования и манипулирования хирургических инструментов. [26, с. 20-23]
Все это обеспечивает гораздо большую точность, гибкость и контроль со строны оператора.
Библиография:
- Satava R.M. Surgical robotic: the early chronicles:a personal historical perpective.Surg Laparosc Endosc. Percutan Tech. 2002; 12:6-16 [Pub Med].
- Smith I. Anesthesia for laparoscopy with emphasis on outpatient laparoscopy. Anaesth Clin North Am. 2001; 19:21-41.
- Zacks S.L., Sandler R.S., Brown R. S. Jr. Apopulation based cohort study comparing laparoscopic cholecystectomy and open cholecystectomy. Am J Gastroenterol. 2002. Feb;97(2): 334-40.
- Nezhat C., Lavie O., Lemyre M.,et al.Robot-assisted laparoscopic surgery in gynecology: scientific dream or reality? Reproductive Surgery. P. 2620-2622.
- Gupta K, Mehta Y, Sarrin Jolly A, Khanna S. Anesthesia for robotic gynecological surgery. S. Anaesthesia for robotic gynecological surgery. Anesth. Intensive Care 2012; 40:614-621. [Pub Med]
- Kim VB., Chapman WH., Albrecht RJ. Early experience with telemanipulative robot-assisted laparoscopic cholecystectomy using da Vinci. Surg Laparoscop Endoscop Tech 2002 12 34-40.[PubMed].
- Kwoh Y.S., Hou J.,Jonckheere E.A. et al. A robot with improved absolute positiving accuracy for CT guided stereotactic brain surgery. IEEE Trans Biomed Eng. 1988; 35:153-161 [Pub Med].
- Davies B. A rewiev of robotics in surgery. Proc Ints Mech Eng. 2000; 214:129-140 [Pub Med].
- Harris SJ, Arambula-Cosio F, Mei Q. et al. The Probot-an active robot for prostate resection. Proc Inst Mech Eng [H] 1997 211 317-325.[PubMed]
- Himpens Jacques. Surgery in space: the future of robotic telesurgery (Haidegger T, Szandor J, Benyo Z. Surg Endosc 2001;25 (3):681-690
- Jacques Marescaux, Joel Leroy, Michel Gagner et al. Robotic-assisted surgery. Nature 413, 379-380 (27 September 2001).
- Пожарлиев Т., Радионов М. История на ендоскопията и лапароскопската хирургия. Лапароскопска хирургия. XV. Стр.9-16.
- Cho J.E., Shamshirsaz A.H., Nezhat C.,et al.New technologies for reproductive medicine: laparoscopy, endoscopy, robotic surgery and gynecology. A review of the literature. Minerva Ginecologica. A Journal on Obstetrics and Ginecologica. 2010, April; 62 (2):137-67.
- Camarillo D.B. et al. The American Journal of Surgery 188 (Supple to October 2004) 2S-15S
- Murphy D., Challacombe B., Khan MS., and Dasgupta P. Robotic technology in urology. Postgrad Med J. 2006 Nov; 82(973):743-747. [PubMed]
- Kruijdenberg CBM, Van PL, Bekkers R.L. Robot-assisted versus total laparoscopic radical hysterectomy in early cervical cancer, a review. Gynecologic Oncology. 2011;120(3):334-339.
- Ranmirez P.T., Soliman P.T., Schmeler K.M., Reis Rd., Frumovitz M. Laparoscopic and robotic techniques for radical hysterectomy in patients with early-stage cervical cancer. Gynecologic Oncology.2008; 110(3,supplement 2): S-21-S24.
- AbhilashPandya,Luke A. Reisner , Brady King , Nathan Lucas , Anthony Composto ,Michael Klein and Richard Darin Ellis . A Review of Camera Viewpoint Automation in Robotic and Laparoscopic Surgery Robotics 2014, 3(3), 310-329; doi:10.3390/robotics3030310 Review)
- Kim VB., Chapman WH., Albrecht RJ. Early experience with telemanipulative robot-assisted laparoscopic cholecystectomy using da Vinci. Surg Laparoscop Endoscop Tech 2002 12 34-40.[PubMed].
- WHO-Surgical Safety Checklist
- Haynes AB, Weiser TG, Berry WR, Lipsitz SR, Breizat A-HS, Dellinger EP, Herbosa T, Joseph S, Kibatala PL, Lipitan MCM, Merry AF, Moorthy K, Reznick RK, Taylor B, Gawande A a. A surgical safety checklist to reduce morbidity and morality in a global population. N Engl J Med. 2009; 360:491-499. [Pub Med]
- Song J, Vemana G, Mobley JM, Bhayani SB. The second „time-out“:a surgical safety checklist for lengthy robotic surgeries. Patient Saf Surg. 2013 Jan 3;7 (1):19.
- Zanetti G, Giardina R, Platt R. Intraoperative redosing of cefazolin and risk for surgical site infection in cardiac surgery. Emarg Infect Dis. 2001;7:828-831. [PMC free article] [Pub Med]
- Steinberg JP, Braun BI, Hellinger WC, Kusek L, Bozikis MR, Bush AJ, Dellinger EP, Burke JP, Simmons B, Kritchevsky SB. Timing of antimicrobial prophylaxis and risk of surgical site infection: results from the Trial to Reduce Antimicrobial Prophylaxis Errots. Am Surg. 2009;250:10-16. [Pub Med] [Cross Ref]
- Daniel WT, Puskas JD, Baio KT, Liberman HA, Devireddy C, Finn A, Halkos ME. Lessons learned from robotic-assisted coronary artery bypass surgery: risk factors for conversion to median sternotomy.Inovations. (Philadelphia, Pa) 2012;7:323-327. [Pub Med] [Cross Ref]
- Desgupta P., Jones A., Gill I.S. Robotic urologyc surgery: a perspective. BJU Int 2005 95 20-23. [PubMed][schema type=»book» name=»Космические технологии в медицине- история, приложение и недостатки роботизированной и лапароскопической хирургии» description=»Целью данной статьи является путем обзора мировой литературы, сделать ретроспективный исторический обзор минимально инвазивной хирургии (лапароскопической и роботизированной), а также и основные преимущества и недостатки обоих методов.» author=»К.Цветанова, Сл. Томов, Г. Цанев, С. Цветкова, Л. Занфировa» publisher=»Басаранович Екатерина» pubdate=»2016-12-15″ edition=»euroasia-science_6(27)_23.06.2016″ ebook=»yes» ]