

Статья является продолжением цикла статей авторов, посвященных теме многофункциональных модульных систем (далее по тексту – МФМС, система). Предыдущие статьи рассматривали как её основные положения [3; 7; 8], так и частные, практические реализации [4; 5; 6] в различных областях электроники.
Законы создания и развития для всех технических систем одинаковы [1], в том числе и для всех электронных систем (ЭС). Но как во всех видах систем, так и в ЭС имеются свои частные особенности. И, следовательно, рассматривать законы синтеза и формирования ЭС следует с точки зрения электроники. А поскольку рассматриваются многофункциональные модульные системы, то и акцентировать внимание будем на многофункциональность и модульность ЭС.
Прежде всего, исследуем законы создания и развития технических систем в аспекте электронных МФМС, и начнем с законов, определяющих начало жизни систем.
Закон 1. Закон полноты частей системы [1]: «Необходимым условием принципиальной жизнеспособности технической системы является наличие и минимальная работоспособность основных частей системы».
Представим себе минимальный набор для создания жизнеспособных технических систем. При этом для анализа электронных МФМС выберем энергетическую и информационную управляемые системы.
1) Входные устройства в ЭС определим в соответствии с доступными способами извлечения энергии или информации:
- источники – преобразователи внутренних ресурсов системы в электронную форму представления энергии или информации (например – источники излучения, таймеры и т.п.);
- приёмники – преобразователи внешних ресурсов, не принадлежащих системе, в электронную форму представления энергии или информации (например – датчики, АЦП и т.п.).
2) Выходные устройства в ЭС также определим в соответствии с доступными способами применения энергии или информации:
- потребители – преобразователи электронной формы представления энергии или информации во внутренние ресурсы системы (например – накопители, аккумуляторы и т.п.);
- передатчики – преобразователи электронной формы представления энергии или информации во внешние ресурсы, не принадлежащие системе (например – излучатели, информационные сети и т.п.).
Разумеется, возможна любая комбинация в наборе как внутри входных или выходных устройств, так и между ними. Здесь следует отметить, что по характеру взаимосвязи с внешней средой [2] системы, имеющие в своем составе только источники и потребители, а также не имеющие внешнего управления и обеспечения можно отнести к закрытым (автономным) системам, хотя полностью автономных систем в природе не существует, а любые другие комбинации – к открытым (неавтономным) системам.
3) Сутью или основным смыслом любой управляемой системы является способ управления энергией или информацией. Это могут быть любые электронные преобразования формы энергии или формата информации по заданному наперед или перманентно изменяемому алгоритму решения макрозадачи системы.
4) Связь устройств извлечения с устройствами управления, а затем с устройствами применения должна осуществляться по внутрисистемным каналам передачи энергии или информации.
В таблице 1 приведён минимальный набор основных составных частей для создания системы.
Таблица 1 – Основной состав управляемых систем
| Наименование электронной системы | Устройства извлечения | Устройства управления | Внутрисистемные связи | Устройства применения |
| Энергетическая | Источник энергии | Управляемый переработчик энергии | Канал получения энергии | Потребитель энергии |
| Приемник энергии | Канал выдачи энергии | Передатчик энергии | ||
| Информационная | Источник информации | Управляемый обработчик информации | Канал получения информации | Потребитель информации |
| Приемник информации | Канал выдачи информации | Передатчик информации |
Разумеется, при создании систем может потребоваться увеличение количественного состава в какой-либо категории. Например, практически во всех системах как минимум два канала передачи. И это необходимо для вполне логичного осуществления передачи: от приемника к органу управления и от органа управления к передатчику. Кроме того, при получении от источника энергии или информации могут потребоваться дополнительные устройства для их преобразования к виду удобному для управления ими, а затем, возможно, потребуется их обратное преобразование. Вдобавок потребитель энергии или информации может оказаться как оконечным устройством, так и промежуточным звеном для передачи в другую систему. Следовательно, количественный и качественный состав системы определяется только макрозадачей самой системы.
Но и это ещё не главное. Суть в том, что минимальный набор элементов системы, перечисленный таблице 1, должен представлять собой неразрывную последовательность выполнения функций. Нарушение этой цепи неизбежно приведет к неработоспособности системы (это уже относится ко второму закону синтеза систем). Поэтому любая жизнеспособная система должна обладать как минимум основным набором (это раз) взаимосвязанных (это два) и работоспособных (это три) составных частей. Основной состав управляемых систем приведён на рисунке 1.


Рисунок 1. Основной состав управляемых электронных систем.
По первому закону выделим основные части создаваемой системы, не забывая про её модульность и многофункциональность.
Как уже было сказано выше, в МФМС для решения элементарных задач предполагается использование элементарных модулей, выполняющих каждый отдельную функцию общей задачи системы. Поэтому они справедливо были выше названы – функциональными модулями [8]. При изменении общей макрозадачи системы изменяется и её составляющая – макрозадача функциональных модулей, и, соответственно, сам набор функциональных модулей, подстраиваясь для её решения. Поэтому состав функциональных модулей является качественно и количественно переменной величиной.
Будем считать, что в электронных МФМС функциональные модули исполняют роль источников или приёмников энергии или информации.
Сбор элементарных задач функциональных модулей в единую макрозадачу (единое решение системы элементарных функций) осуществляет основное (главное) устройство – ядро системы [8].
В соответствии со следствием, вытекающим из закона 1, для того «чтобы техническая система была управляемой, необходимо, чтобы хотя бы одна ее часть была управляемой» [1]. Функцию управления системой по заданному наперед или по задаваемому извне алгоритму выполняет ядро системы. Следовательно, ядро – основной модуль управления системой, объединяющий все её составные части – модули.
Ядро системы аппаратно может состоять из одного или нескольких модулей, в зависимости от сложности решения своей части макрозадачи системы – макрозадачи ядра. При этом макрозадача ядра может разбиваться на элементарные задачи, как по реальному количеству модулей, так и на виртуальные (не выраженные аппаратно) фрагменты, обусловленные спецификой самой макрозадачи.
Ядро, по сути выполнения своей части макрозадачи, является аппаратно неизменяемой величиной, но как модуль – хотя и редко, но всё же меняемое устройство. Замена модуля ядра может происходить или при выходе его из строя, или в процессе эволюции системы, когда в ходе развития системы нарушается его способность к решению этой самой своей части макрозадачи.
Для обеспечения функционирования системы используются сервисные модули, образующие все вместе базовую часть системы. Поэтому обособим их отдельным понятием – базовые модули [8]. Базовые модули, как и в случае с ядром, являются редко меняемыми модулями, т.е. лишь в случаях замены неисправного модуля или также в процессе эволюции системы, потому и получили такое фундаментальное название.
Базовые модули электронной системы можно разделить на три основные категории:
- базовые модули (один или несколько), обеспечивающие электропитание системы, относятся к категории источников и являются, как правило, обязательными элементами ЭС;
- базовые модули (один или несколько), обеспечивающие функции управления (в случае надобности таковой), разумеется, относятся к категории управления и являются не всегда обязательными элементами ЭС;
- базовые модули, выполняющие роль выхода системы для вывода энергии или информации, относятся к категории потребителей (передатчиков) и являются обязательными элементами любой системы.
Основные группы модулей электронных МФМС, выделенные в соответствии с законом 1, а также принципами модульности и многофункциональности, представлены на рисунке 2.
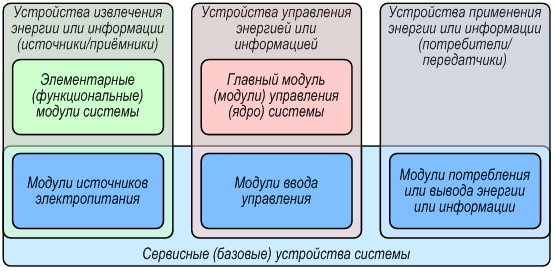

Рисунок 2. Основные группы модулей электронных МФМС.
Закон 2. Закон энергетической проводимости [1]: «Необходимым условием принципиальной жизнеспособности технической системы является сквозное прохождение энергии по всем частям системы».
Это определение в полной мере справедливо для электронных энергетических систем, а применительно к информационным системам закон 2 следует читать так: «Необходимым условием принципиальной жизнеспособности информационной системы является сквозное прохождение информации по всем частям системы». А закону 2 дадим общее название: «Закон проводимости системы».
Любая энергетическая система предназначена для переработки энергии, а любая информационная система предназначена для обработки информации. Отсюда вывод: полученная электронной системой энергия или информация должна быть в определённой форме передана на выход системы. А для этого требуется:
- передача энергии или информации от входа к выходу внутри составных частей системы;
- передача энергии или информации между составными частями системы.
Для связи составных частей, в соответствии с таблицей 1 и рисунком 1, используются каналы передачи энергии или информации, называемые внутрисистемными связями [8].
Внутрисистемные связи (ВСС) используются в электронных МФМС для передачи электроэнергии и/или обмена информацией между ядром системы и остальными модулями. ВСС могут быть как в оригинальном исполнении, так и виде стандартных интерфейсов. При этом если оригинальные линии связи практически не несут никакой дополнительной функциональной нагрузки, то ВСС в виде интерфейсов вводят дополнительные требования по количеству и видам подключений и, следовательно, должны быть выделены в самостоятельный структурный элемент.
На внутрисистемные связи электронных МФМС возложены обязанности не только передачи энергии или информации между модулями и ядром системы, но ещё и совместно с ядром — обеспечение ритмичности или синхронизации (от греческого συνχρόνος — одновременный) этой передачи. Отсюда вытекает третий закон синтеза электронных МФМС.
Закон 3. Закон согласования ритмики частей системы: «Необходимым условием принципиальной жизнеспособности технической системы является согласование ритмики (частоты колебаний, периодичности) всех частей системы» [1].
Этот закон для электронных систем следует трактовать следующим образом: «Работа всех составных частей электронных систем должна быть синхронизирована». И это будет: «Закон синхронизации модулей системы».
Под ритмикой или синхронностью следует понимать объёмно-временное нормирование потоков энергии или информации во избежание их потерь при передаче, как внутри составных частей системы, так и между ними.
Любая система должна стремиться к максимально быстрому прохождению через неё как можно большего объёма энергии или информации.
Для нормального функционирования системы требуется полное согласование работы всех её частей по прохождению потока энергии или информации. При этом используются различные методы ритмичности или синхронизации, обеспечивающие беспрепятственное порождение потоков энергии или информации в элементах системы и через систему в целом.
При последовательной обработке энергии или информации – последовательном способе решения целесообразен динамический режим поочередного опроса функциональных модулей.
В условиях, когда невозможен последовательный опрос функциональных модулей системы или выявлена недостаточная пропускная способность её ядра, производится увеличение каналов обработки в модуле ядра, а при достижении предела количества каналов в модуле ядра, то в случае его перегрузки производится параллельное наращивание количества модулей ядра. В этом случае происходит переход к параллельному методу решения.
Существует в системах множество методов синхронизации происходящих процессов и регулирования протекающих потоков, также как критериев их настройки и видов их контроля, но задача здесь одна – прохождение через систему энергии или информации без потерь.
Законы создания систем с учётом сделанных уточнений представлены на рисунке 3 как законы создания электронных МФМС.
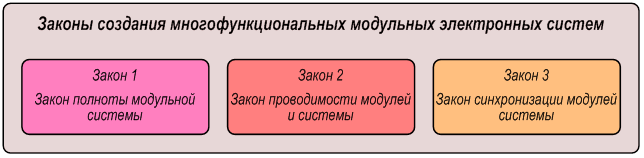

Рисунок 3. Законы создания МФМС.
Эти законы в полной мере можно использовать при создании любых электронных систем.
В следующей статье будут рассмотрены законы внутрисистемного развития МФМС вне зависимости от внешних воздействий.
1Альтшуллер Г.С. Творчество как точная наука. — М.: Сов. радио, 1979.
2Математические основы теории систем: учебник для вузов / А.М. Малышенко. – Томск: Изд-во Томского политехнического университета, 2008. – 364 с.: ил.
3Родина Т.В., Трифанова Е.С. Курс лекций по математическому анализу – I (для напр. «Прикладная математика и информатика»). Учебное пособие. – СПб: СПбГУ ИТМО, 2010. – 183с.
4Скляр А.В., Мережин Н.И. Модульный дефектоскоп – томограф. Евразийский Союз Ученых (ЕСУ). Ежемесячный научный журнал № 12 (21) / 2015, часть 5, с. 91 –94.
5Скляр А.В., Мережин Н.И. Модульная концепция в мультиметрах. — Межотраслевой институт «Наука и образование». Ежемесячный научный журнал № 2 (9) / 2015, с. 44 – 47.
6Скляр А.В., Мережин Н.И. Модульные многофункциональные системы. Модульный климатический мультиметр. — Международный независимый институт Математики и Систем «МиС». Ежемесячный научный журнал № 2 (13) / 2015.
7Скляр А.В., Мережин Н.И. Основные свойства модульных многофункциональных систем. Евразийский Союз Ученых (ЕСУ). Ежемесячный научный журнал № 4 (13) / 2015, часть 5, с. 41 – 43.
8Скляр А.В., Мережин Н.И. Особенности построения модульных многофункциональных систем. Евразийский Союз Ученых (ЕСУ). Ежемесячный научный журнал № 3 (12) / 2015, часть 5, с. 6 – 8.[schema type=»book» name=»УСЛОВИЯ СОЗДАНИЯ МНОГОФУНКЦИОНАЛЬНЫХ МОДУЛЬНЫХ ЭЛЕКТРОННЫХ СИСТЕМ» description=»В статье рассмотрены законы создания жизнеспособных управляемых многофункциональных мо-дульных электронных систем.» author=»Скляр Андрей Вадимович, Мережин Николай Иванович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-02-14″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.01.2017_1(34)» ebook=»yes» ]