

Станочный электропривод (СЭ) представляет собой сложную систему, состоящую как из электронных и электротехнических (датчики, преобразователи частоты (ПЧ), устройства электроавтоматики и др.), так и механических и электромеханических устройств (муфты, передаточные звенья, электродвигатели) [1, с.3]. При проектировании СЭ зачастую необходимо смоделировать ситуацию, характерную для технологических операций станка, на котором СЭ будет использоваться [2, с.6-7]. Это становится особенно актуально при внедрении новых (инновационных) компонентов СЭ и других элементов электроавтоматики и проверки работоспособности этих систем друг с другом [3].
Большинство задач проверки работоспособности проектируемого СЭ решают при помощи экспертной оценки либо с использованием специального стенда, который предварительно необходимо собрать и отладить. Результаты экспертной оценки не всегда поддаются численному выражение, чаще всего это всего лишь мнение специалиста (или группы специалистов) в виде «заработает/не заработает» [4, с.20].
В отличие от экспертного мнения, работа со стендом позволяет получить необходимые характеристики и данные о работе СЭ и, если необходимо, внести изменения и оценить их влияние на систему в целом. Однако, цена самого стенда и время на его создание могут быть сопоставимы с временем и стоимостью всего проектируемого СЭ. Выходом из положения может быть проведение моделирования с использованием специализированных средств и моделей [5, с.35-36].
Основной проблемой при этом становится создание адекватных моделей, данные на выходе которых идентичны данным реального прототипа [6, с.20-25]. Применение пакета программ NI Multsim 13, в состав которой уже входит ряд готовых моделей, позволяет сконцентрироваться на проектировании всей системы в целом, а не на каждом блоке в отдельности. А совместное использование Multisim 13 со средой разработки измерительных систем LabVIEW позволяет сравнивать теоретические данные с реальными непосредственно в процессе создания схем, что снижает количество проектных итераций, число ошибок в прототипах и ускоряет выход продукции на рынок.
На рис. 1 показана блок схема модели преобразователя частоты.
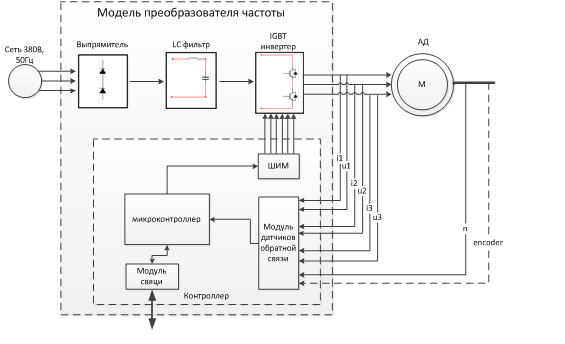

Рисунок 1. Блок-схема модели преобразователя частоты, где: i1—i3 – выходные токи, u1—u3 – выходные напряжения, n – скорость на валу двигателя, encoder – датчик угла поворота.
Модель ПЧ состоит из следующих блоков: выпрямитель, LC фильтр, IGBT инвертор, генератор ШИМ, модуль датчиков обратной связи, микроконтроллер и модуль связи с внешними устройствами и системами (например, системой ЧПУ).
Блок микроконтроллера при моделировании может быть заменен на специальное программное обеспечение (СПО), в котором реализованы алгоритмы управления. Как упоминалось выше совместно с Multisim возможно использование пакета LabVIEW, для управления процессами в ПЧ по данным о токе, напряжении и текущем положении.
Для проведения эксперимента была разработана схемотехническая модель преобразователя частоты и подключена к библиотечной модели асинхронного двигателя (рис. 2). Параметры модели АД были идентифицированы по типу двигателя 4А132М4У3, для которого в дальнейшем выполнялись все расчеты.
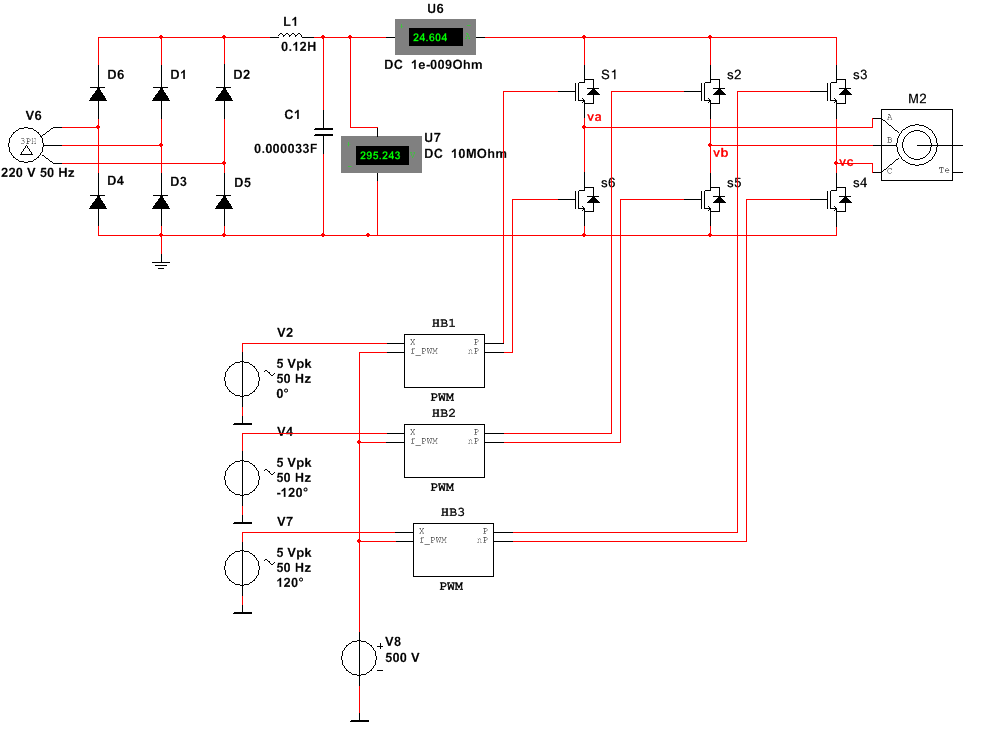

Рисунок 2. Общая схема модели привода с разработанным частотным преобразователем, где: V6 – трехфазная сеть с напряжением 220В и частотой 50Гц, D1-D6 – диоды, совокупность которых является диодным мостом, L1 и C1 – являются Г-образным LC-фильтром, S1-S6 – ключи инвертора на базе биполярных транзисторов, V2, V4, V7 – элементы управления, V8 – элемент, задающий частоту ШИМа, HB1-HB3 – ШИМ, М2 – библиотечная модель АД.
Цель эксперимента заключается в сравнении данных, полученных при моделировании с данными, полученными при проведении расчетов. Расчеты проводились по известным методикам [7, с.360-361].
Первая часть опыта заключается в получении временной диаграммы схемотехнической модели ПЧ (рис. 3).


Рисунок 3. Временная диаграмма схемотехнической модели электропривода: V(3) – скорость вращения ротора, V(4) – момент на валу двигателя.
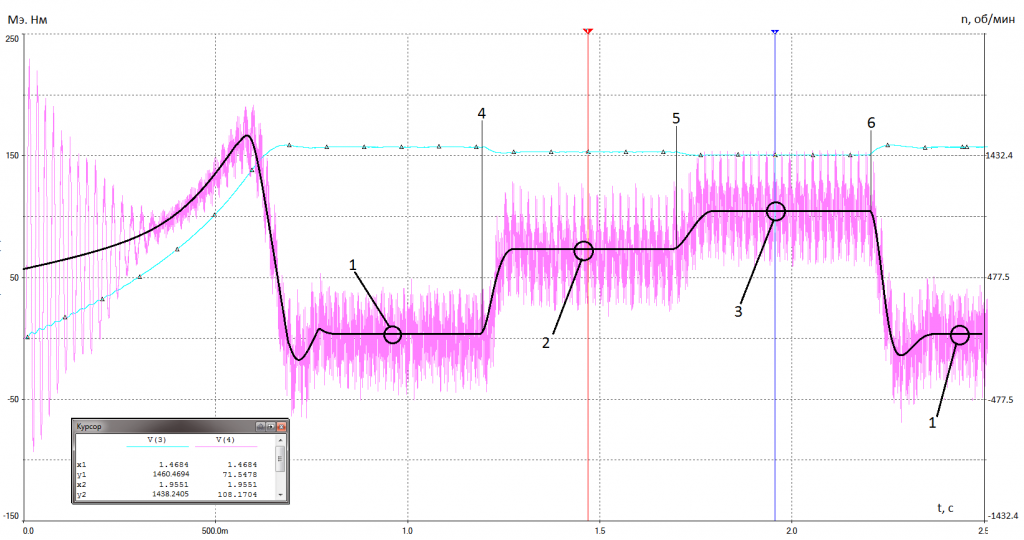
После проверки работоспособности модели привода в холостом режиме проведем моделирование изменения внешней нагрузки. Внешняя нагрузка может представлять собой, к примеру, процесс резания (рис. 4).

|
Рисунок 4. Диаграмма реакции электропривода на приложенные внешние воздействия: V(3) – скорость вращения ротора, V(4) – момент на валу двигателя,1 – холостой ход, 2 – выход в номинальный режим (Мном), 3 – перегрузка (Мпер = 1,5 Мном), 4 – момент «наброса» нагрузки (врезание резца на номинальную глубину резания), 5 – момент «наброса» дополнительной нагрузки (врезание резца глубже номинальной глубины резания), 6 – снятие нагрузка (отвод инструмента). |
Из диаграммы (рис. 4) видно, что после приложения внешней нагрузки (4), скорость вращения вала электродвигателя ”просела”. После, так называемого, проседания скорость вращения ротора равна nн = 1460,5об/мин, а момент нагрузки равен номинальному моменту Мном = 71,5 Нм, что означает, что двигатель вышел в номинальный режим с номинальной нагрузкой (2). После того, как скорость и момент устоялись, производим увеличение внешней нагрузки в полтора раза (5). Данная процедура симулирует момент перегрузки двигателя, например, врезание резца слишком глубоко по ошибки программирования. После приложения момента перегрузки снова наблюдается “проседание” скорости вращения вала двигателя. Скорости вращение ротора при этом равна nпер = 1438 об/мин. Как видно из диаграммы (рис. 4) после приложения нагрузки перегрузки двигатель продолжает стабильно работать (3), хоть и с меньшей скоростью и после отключения внешней нагрузки (6) возвращается в холостой режим (1).
Результаты сравнения расчетных данных и проведенного виртуального эксперимента приведены в табл. 1.
Таблица 1.
Результаты виртуального эксперимента
| Режимы | Момент, Нм | Скорость, об/мин | ||
| Холостой ход | Точка 1 | Расчет | 177,3 | 1278,9 |
| Эксперимент | 175,3 | 1279,8 | ||
| Точка 2 | Расчет | 1,9 | 1499 | |
| Эксперимент | 3,7 | 1498,3 | ||
| Номинальная нагрузка | Точка 1 | Расчет | 72,2 | 1458 |
| Эксперимент | 71,5 | 1460,5 | ||
| Перегрузка | Точка 2 | Расчет | 108,3 | 1435,7 |
| Эксперимент | 108,2 | 1438,2 |
Основываясь на полученных данных, можно отметить, что разработанная модель адекватно ведет себя в номинальном режиме, показывая скорости и моменты, близкие или совпадающие со значениями, полученными при расчетах.
Пусковые, номинальные и максимальные значения моментов и скоростей, полученные при моделировании и расчете, различаются не значительно (0,67% от всего диапазона). Таким образом, разработанная модель показала результаты, близкие к расчетным в нагрузке и перегрузке. В настоящее время разработанная модель работает по принципу скалярного управления, но с использованием пакета программ LabVIEW становится возможным исследование алгоритмов векторного, а также «бездатчикового» управления.
Работа выполнена при поддержке Гранта Президента №14.Z56.14.2749-МК от 03.02.2014г.
Список литературы
- Григорьев С.Н., Кузовкин В.А., Филатов В.В. Имитационное моделирование асинхронного электропривода станков // Мехатроника. Автоматизация. Управление. – 2011. №11. С. 2–7.
- Григорьев С.Н. Проблемы и перспективы развития отечественного машиностроительного производства // Справочник. Инженерный журнал. – 2011. №12 (177). С. 3–7.
- Григорьев С.Н. Научно-технические проблемы построения современных технологических систем с числовым программным управлением // Мехатроника, автоматизация, управление. – 2011. № 4. С. 19-26.
- Кузовкин В.А. Электронные системы управления. Теория и технические средства электроавтоматики: учеб. Пособие. М.: Из-во «Станкин», 2006. – 268 с.
- Кузовкин В.А., Филатов В.В. Моделирование асинхронного двигателя в программной среде Electronics Workbench // Мехатроника, автоматизация, управление. – 2009. № 1(94). С. 35-41.
- Кузовкин В.А., Филатов В.В. Моделирование электрических и электронных устройств в Multisim 10: учеб. пособие. М.: МГТУ «Станкин», 2010. – 213 с.
- Соколов Е.А., Чумаев Д.А. Экспериментальное определение статических и динамических параметров трехфазного асинхронного электродвигателя с короткозамкнутым ротором // XII науч. конф. МГТУ «Станкин» и «Учебно-научного центра математического моделирования МГТУ «Станкин» – ИММ РАН» по математическому моделированию и информатике: сб. докл., 2009. – с. 360-363.[schema type=»book» name=»РАЗРАБОТКА СХЕМОТЕХНИЧЕСКОЙ МОДЕЛИ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ СТАНОЧНОГО ЭЛЕКТРОПРИВОДА» description=»Изложен способ построения схемотехнической модели частотного преобразователя станочного электропривода. Приведена методика проверки адекватности разработанной модели.» author=»Порватов Артур Николаевич, Порватова Арина Николаевна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-03″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_27.06.2015_06(15)» ebook=»yes» ]