

При создании автоматических систем управления станочным оборудованием решение многих исследовательских и проектных задач осуществляется методами, в основе которых лежит имитационное моделирование. Наиболее эффективным является имитационное математическое моделирование с использованием современных прикладных программных комплексов. Один из таких программных продуктов пакет Multisim предназначен для выполнения многоцелевого анализа процессов в аналоговых и цифровых электронных устройствах посредством схемотехнического моделирования [1, с.65]. Имитационное математическое моделирование включает в себя получение информации о свойствах объекта моделирования (электропривода) через основные характеристики динамических и статических режимов функционирования.
Основным управляемым элементом в системе электропривода является исполнительный двигатель, поэтому его характеристики являются определяющими при осуществлении процесса управления. Процесс создания модели двигателя и последующее достижение поставленной цели моделирования реализуются в виде совокупности процедур, определяемой как вычислительный эксперимент.
Полный автоматизированный цикл проведения вычислительного эксперимента содержит последовательность операций, фактически повторяющих стадии проведения натурного (физического) эксперимента (рис.1).
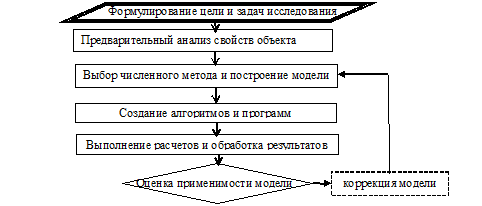

Рис.1. Последовательность операций проведения вычислительного эксперимента
Вычислительный эксперимент обладает рядом преимуществ по сравнению с натурным экспериментом. Он позволяет осуществлять варьирование многих параметров объекта в широких пределах для оценки их влияния на соответствующие характеристики, а также дает возможность задания внешних воздействий любой формы и фиксировать реакции объекта. Однако необходимо учитывать, что протекающие в объекте процессы отражаются только в рамках тех ограничений, в которых данная модель была построена.
Предлагаемая методика вычислительного эксперимента в общем случае включает три этапа. На первом этапе выполняются следующие операции.
- Определяется основная цель проведения вычислительного эксперимента.
- В соответствии с поставленной целью принимается допустимый уровень идеализации исследований, формулируются и обосновываются упрощающие допущения и создается базовая модель виртуального исследовательского стенда, Ядром этой модели является имитационная модель исполнительного двигателя.
- Проводится параметризация имитационной модели исполнительного двигателя. В качестве начального приближения принимаются паспортные значения параметров (из каталога или справочника). На их основе определяются недостающие параметры модели по специальным методикам расчета. При несовпадении характеристики со своими паспортными аналогами выбранные параметры корректируются. Далее осуществляется итерационный процесс, пока характеристики модели исполнительного двигателя не окажутся в доверительном интервале.
На втором этапе строится модель виртуального исследовательского стенда.
- В соответствии с возможностями базовой модели виртуального исследовательского стенда, определяется необходимый перечень дополнительных блоков стенда и перечень требуемых компонент библиотеки используемого программного продукта.
Третий этап состоит в проведении виртуальных экспериментов и обработке результатов.
- Осуществляется требуемый перечень виртуальных экспериментов. По результатам оценивается соответствие характеристик построенной модели стенда известным паспортным характеристикам. При необходимости осуществляются параметрический и структурный синтез.
- Уточняется программа виртуального эксперимента и повторяется процедура численного решения.
- Для обработки результатов виртуальных экспериментов программа Multisim позволяет транслировать их в программные пакеты Excel и MathCad.
В качестве иллюстрации далее рассмотрено применение изложенной методики для вычислительного эксперимента определения частотных и временных характеристик трехфазного асинхронного двигателя (АД) привода главного движения станка.
Поскольку частотные характеристики являются статическими и определяются как реакции на гармонические воздействия, то вполне допустимо условие квазистационарности анализируемых величин. При этом временные характеристики, получаемые на квазистационарной модели и на динамической имитационной модели трехфазного АД с короткозамкнутым ротором, в целом имеют близкие значения [2, с.94]. Расхождения наблюдаются в основном в докритических областях электромагнитного момента , соответствующих пусковым режимам. Отличия зависимостей скорости вращения ротора незначительны. Поэтому для данного вычислительного эксперимента в имитационной модели исследовательского стенда (рис.2) целесообразно использование квазистационарной имитационной модели трехфазного АД с короткозамкнутым ротором [3, с.113].
Параметризация имитационной модели исполнительного двигателя осуществлялась на основе его физического прототипа — АД типа 4А132М4У3. На параметризованной имитационной модели исполнительного двигателя проводился виртуальный эксперимент построения механических характеристик , которые сравнивались затем со своими паспортными аналогами. По результатам сравнения корректировались выбранные параметры модели. Полученные в результате итерационного процесса значения параметров имитационной модели принимались как окончательный вариант параметров для иерархического блока и соответствующих источников напряжения и (рис.2).
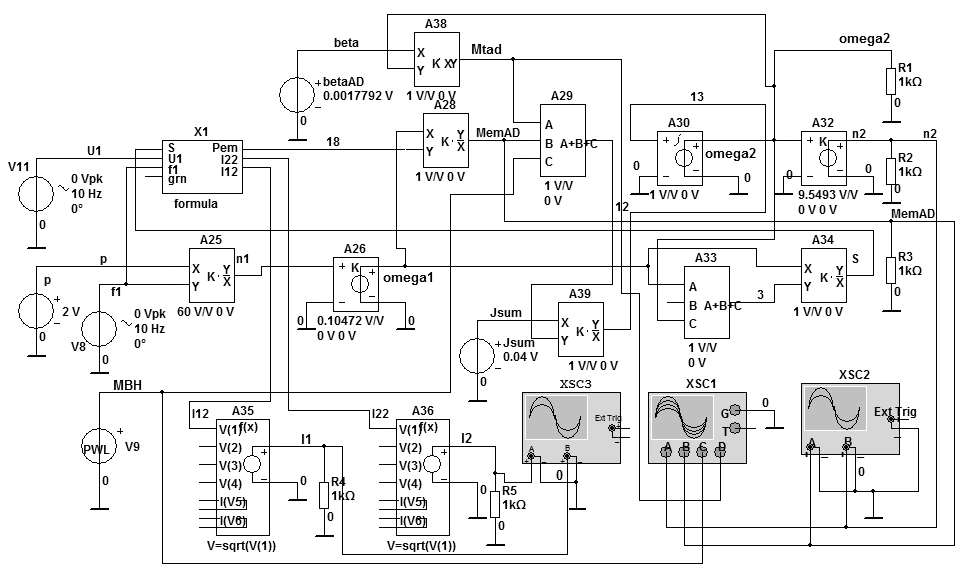

Рис.2. Схема виртуального исследовательского стенда с трехфазным АД привода главного движения станка
В соответствии с целью эксперимента базовая имитационная модель АД в исследовательском стенде дополнена блоками, обеспечивающими выполнение программы вычислительного эксперимента. Такими блоками являются источники синусоидального напряжения (AC_Voltage) V8 и V11, характеризуемые амплитудными значениями напряжения (Vpk), значениями напряжения дополнительного начального смещения (Voltage Offset), значениями частоты Frequency (F), временем задержки включения (Time Delay), начальной фазой (Phase) и другими параметрами. Эти источники наиболее удобны при выполнении анализа частотных характеристик (АЧХ и ФЧХ) в режиме AC Analysis и получении переходных характеристик в режиме Transient Analysis [4, с.207].
Кроме перечисленных выше источников вводится элемент V9 — источник напряжения произвольной формы с кусочно-линейным заданием PIECEWISE LINEAR VOLTAGE (PWL Voltage). Он дает возможность исследовать на модели стенда различные режимы: пусковые, рабочие и др. при произвольных нагрузках. Режимы внешней нагрузки моделируются напряжением произвольной формы с кусочно-линейным заданием. Участки кусочно-линейной функции соответствуют режимам холостого хода, «наброса» и «сброса» нагрузки и т.д. Таким образом, дополнительные блоки V8, V9, и V11 позволяют моделировать управляющие воздействия и внешние возмущения. Управляющими воздействиями при «амплитудном» и «частотном» способах управления АД являются действующее значение напряжения на фазах обмотки статора и циклическая частота . Внешним возмущением, в данном случае, является момент внешней нагрузки .
Для реализации возможности проведения виртуального вычислительного эксперимента подобно натурному исследованию на лабораторной установке в состав стенда вводятся виртуальные контрольно-измерительные приборы: двухканальные осциллографы (Oscilloscope) – XSC2, XSC3 и четырехканальный осциллограф (Four Channel Oscilloscope) – XSC1. Все дополнительные блоки, введенные в базовую имитационную модель, являются библиотечными компонентами пакета MultiSim. Поэтому разработка и создание моделей дополнительных блоков и пользовательских моделей конкретных элементов в данном вычислительном эксперименте не требуются.
Реализация требуемого перечня виртуальных экспериментов проводилась с использованием различных режимов работы пакета MultiSim. Получение временных зависимостей (рис.3,а) проводилось в режиме виртуального эксперимента с использованием контрольно-измерительных приборов, по аналогии с физическим экспериментом. Построение частотных характеристик осуществлялось в режиме AC Analysis. Механическая характеристика (рис.3,б) является результатом постпроцессорной обработки соответствующих временных зависимостей. Виртуальные цифровые осциллографы позволяют синхронно перестраивать временные зависимости в других координатных осях, в данном случае из в .
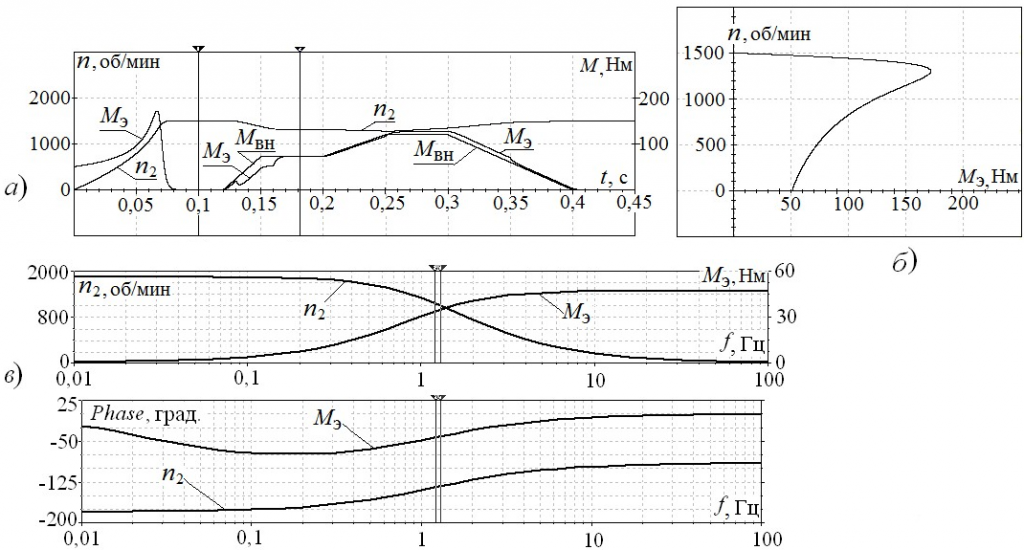



Характеристики, полученные в результате проведения вычислительного эксперимента на построенной модели стенда, практически совпадают в статических режимах с известными паспортными характеристиками трехфазного АД с короткозамкнутым ротором типа 4А132М4У3 [5, с.66]. Дальнейшая коррекция параметров и структурный синтез в данном случае не требуются.
Результаты реализации предложенной методики вычислительного эксперимента позволяют сделать вывод о возможности получения необходимых характеристик моделируемых объектов на стадии проектирования электроприводов станочного оборудования. Методика также применима для разработки и проектирования электроприводов на базе двигателей постоянного тока.
Список литературы.
- Кузовкин В.А., Филатов В.В. Схемотехническое моделирование электрических устройств в Multisim. Учебное пособие. — Старый Оскол: ТНТ, 2013.- 336с.
- Филатов В.В.,Чумаев Д.А. Разработка имитационной динамической модели трехфазного асинхронного электродвигателя. — Вестник МГТУ «Станкин», Научный рецензируемый журнал. №4 (8), 2009. С.89-95. ИЦ ГОУ ВПО МГТУ «Станкин».
- Кузовкин В.А., Филатов В.В. Моделирование процессов управления асинхронным электродвигателем. Вестник МГТУ «Станкин», Научный рецензируемый журнал. №2 (2), 2008. С. 107-116. ИЦ ГОУ ВПО МГТУ «Станкин».
- Кузовкин В.А., Филатов В.В. Моделирование процессов в электрических цепях. Учебное пособие. — М.: изд. «СТАНКИН», 2006. – 212с.
- Кравчик А.Э., Шлаф М.М., Афонин В.И., Соболенская Е.А. Асинхронные двигатели серии 4А: Справочник/ А 90. — М.:Энергоиздат, 1982. — 504с.[schema type=»book» name=»РАЗРАБОТКА МЕТОДИКИ ВЫЧИСЛИТЕЛЬНОГО ЭКСПЕРИМЕНТА В МОДЕЛИРОВАНИИ ИСПОЛНИТЕЛЬНОГО ДВИГАТЕЛЯ СТАНОЧНОГО ЭЛЕКТРОПРИВОДА В ПРОГРАММНОЙ СРЕДЕ NI MULTISIM» description=»В статье приведена методика вычислительного эксперимента в программной среде NI Multisim при моделировании процессов в исполнительном двигателе станочного электропривода. Результаты вычислительного эксперимента, основные статические и динамические характеристики двигателя, позволяют судить о возможности использования методики на стадии разработки и проектирования электроприводов.» author=»Филатов Владимир Витальевич, Чумаева Марина Вячеславовна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-04″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_27.06.2015_06(15)» ebook=»yes» ]