

Измерение скорости потока жидкости или газа с высокой точностью становится все более актуальным в условиях современного развития техники, отраслей промышленности и науки. Развитие современных систем в направлении оптимизации процессов и увеличения эффективности требует применение измерителей, обладающих универсальностью, высоким быстродействием, и достаточной точностью измеряемой физической величины. В таких отраслях как метеорология и, особенно, вертолето- и самолетостроение требуются повышенная точность и расширенный диапазон измерения скорости потока.
При разработке измерителя нашли свое решение такие актуальные проблемы как расширение порога чувствительности в сторону нижнего предела, минимизация габаритов и массы, расширение диапазона измерений при сохранении точности, уменьшение потерь информации, которые происходят вследствие преобразования аналогового сигнала в цифровой, а также пространственное разделение измерительной области и области чувствительного элемента, что позволяет существенно расширить применение измерителя до некоторых отраслей химической и пищевой промышленности.
Разработка конструктивно-кинематической схемы измерителя малых скоростей потока
Поскольку ставится задача о создании измерителя малых скоростей потоков (ИМСП), который должен обладать высокими точностными характеристиками, необходимо синтезировать систему, в которой будет использована физическая величина, измеряемая с высокой точностью, например, время или частота. В автоколебательных системах регистрируемой величиной является время, и, поэтому, использование данного типа систем позволит с высокой точностью измерить величину скоростного потока и производных от нее параметров. Для размещения чувствительного элемента (ЧЭ) в потоке и передачи силового воздействие, вызываемого потоком, на исполнительное устройство используется магнитная муфта (ММ). На рисунке 1 приведена структурная схема устройства.


Рис. 1. Структурная схема ИМСП
Из рисунка видно, что ЧЭ связан с исполнительным устройством, совершающим автоколебания вокруг оси чувствительности под действием знакопеременного сигнала постоянного тока, формируемого в цепи обратной связи путем введения в контур управления нелинейного звена, образуемого последовательно соединенными компаратором и ключом) При этом появление входного воздействия на ЧЭ (точка 4) приводит к смещению центра колебаний и возникновению временной модуляции сигнала, как показано на рисунке 2.


Рис. 2. Смещение центра колебаний
После формирования структурной схемы измерителя можно приступить к более подробному описанию и разработке его элементов.
В данном устройстве ЧЭ имеет вид пластины, которая максимально эффективно преобразует воздействие потока в момент нагрузки. Исполнительное устройство — магнитоэлектрическкого типа с постоянным магнитом на корпусе. Датчик положения, который в данном приборе является элементом обратной связи, выполнен в виде двух оптопар: излучатель, например, светодиод, и приемник, например, фототранзистор,) и “заслонки”, жестко закрепленной на валу исполнительного устройства с возможностью перемещения в зазоре между излучателями и при пересечении “заслонкой” луча светодиода, на фототранзисторе изменяется напряжение. Это изменение регистрирует компаратор, который переключает направление постоянного тока через реле.
Таким образом, была разработана конструктивно-кинематическая схема измерителя малых скоростей потоков, которая изображена на рисунке 3.
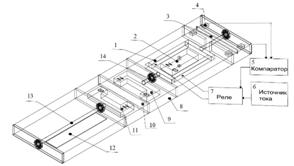

Рис. 3. Конструктивно-кинематическая схема измерителя малых скоростей потоков
В предлагаемом устройстве [3] рамка с обмоткой 1 размещена на валу задатчика механического момента 14 с возможностью угловых перемещений вокруг своей оси симметрии, вместе с заслонкой 3. Валы выполнены в виде стержня круглого сечения. Внутри рамки с обмоткой 1 расположен “рамочный” постоянный магнит 2, жестко закрепленный на корпусе 8; рамка с обмоткой 1 соединена с первым явнополюсным постоянным магнитом 9, который образует магнитную связь со вторым явнополюсным постоянным магнитом 11, соединенным с валом чувствительного элемента 13, на котором расположена взаимодействующая с потоком пластинка 12; датчик положения 4 выполнен в виде двух излучателей, и двух фотоприемников и соответственно, закрепленных на корпусе 8, подключенных к входу компаратора 5, к выходу которого подключено реле 7, обоими выходами подключенный к рамке с обмоткой 1 и входом, к которому подключен источник постоянного тока 6. Магнитопроницаемая перегородка 10 установлена на корпусе 8 между первым 9 и вторым 11 явнополюсными постоянными магнитами.
Конструктивно-кинематическая схема измерителя малых скоростей потоков, изображенная на рисунке 3., в достаточной мере описывает прибор для проведения предварительного анализа и, в частности, для составления математической модели.
Принцип действия
Устройство устанавливают на объект для измерения линейной скорости потока. В момент времени, предшествующий началу измерения, заслонка 3, закрывает первый излучатель 4, оставляя второй излучатель открытым. В результате, на выходе фотоприемника появляется сигнал, который подается на вход компаратора 5 и переключает направление постоянного тока посредством реле 7, который подводится к рамке с обмоткой 1. Магнитное поле постоянного тока в рамке, взаимодействует с магнитным полем “рамочного” постоянного магнита 2, и рамка с обмоткой 1 поворачивается под действием силы Ампера до крайнего положения, в котором заслонка 3 закрывает второй излучатель, оставляя первый излучатель открытым, после чего процесс повторяется и исполнительное устройство начинает совершать автоколебания. С помощью магнитной связи колебания передаются на вал чувствительного элемента 13, с закрепленными на нем пластинками 12, которые начинают совершать колебания в той же плоскости, что и исполнительное устройство.
При наличии входного воздействия на пластинке 12, изменяется их центр колебаний, вследствие чего изменяется центр колебаний второго явнополюсного постоянного магнита 11, а за ним и первого явнополюсного постоянного магнита 9, из-за чего уменьшается время, в течение которого был открыт первый излучатель и закрыт второй излучатель. Соответственно время, в течение которого был открыт первый излучатель и закрыт второй излучатель увеличится. В результате этого на выходе компаратора 5 изменятся длительности прямоугольных импульсов, и по изменению их длительности можно судить об измеряемой линейной скорости потока.
Разработка математической модели
Предлагаемый измеритель малых скоростей потоков является электромеханической системой, которая содержит в своей конструкции магнитную муфту. Известно, что электромеханические системы описываются уравнениями Лагранжа-Максвелла вида:


Магнитное поле создается постоянными магнитами. Токи аналогичны обобщенным скоростям, а энергия магнитного поля – кинетической энергии. Эти члены, линейные по токам, эквивалентны выражениям для гироскопических сил. Система уравнений (1) преобразуется к следующему виду [1]:

где: Т-кинетическая энергия системы, W-энергия магнитного поля, q-обобщенные координаты, Q – не потенциальная обобщенная сила.
Полная система уравнений для измерителя скоростей потоков будет иметь вид:
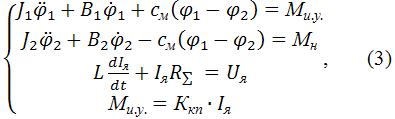

где: J1 и J2 – приведенный момент инерции всех ведущих и ведомых частей муфты, φ1 и φ2 – угол поворота ведущей и ведомой полумуфт соответственно, Mи.у. – момент исполнительного устройства, Мн – момент нагрузки, B1 и B2 – коэффициенты электромагнитного демпфирования и воздушной среды соответственно, -коэффициент угловой жесткости связи магнитных полумуфт.
На начальных этапах разработки прибора, положим, что магнитная связь в магнитной муфте является абсолютно жесткой. Это предположение допустимо в случае, если разность угловых скоростей ведущей и ведомой частей незначительна[1]. Соответственно, при описании собственного движения системы можно переписать уравнения (3) в упрощенном виде:
![]()

где: J∑–сумма приведенных моментов инерций ведущей и ведомой полумуфт; B∑–Демпфирования в системе; c∑–сумма приведенных угловых жесткостей в системе; M–сумма всех приведенных моментов.
Графо-аналитическое определение устойчивости системы
Рассматриваемая система может быть отнесена к нелинейным автоматических системам первого класса, собственное движение которых описывается дифференциальным уравнением вида [2]:
![]()

где: Q(p), R(p) – операторные многочлены любой степени с вещественными постоянными коэффициентами; F (x, px) – заданная нелинейная функция.
Для проведения анализа устойчивости данного уравнения можно применить метод гармонической линеаризации, суть которого заключается в том, что решение x(t) нелинейного дифференциального уравнения (3) достаточно близко к решению x=A∙sinΩt некоторого линейного дифференциального уравнения получаемого, согласно [2], путем замены заданной нелинейной функции F(x,px) выражением
![]()

где: q0, q1–коэффициенты, которые зависят от вида нелинейности. Несмотря на приближенность метода гармонической реализации, он даёт приемлемые для практических целей результаты применительно ко многим типам нелинейных систем, позволяя в удобной и наглядной форме решать задачи анализа и синтеза, определять непосредственные зависимости между основными характеристиками процессов и параметрами систем. Существенным достоинством метода является то, что при его использовании не приходится решать исходные нелинейные уравнения для определения динамики процессов во времени, поскольку искомые результаты находятся путем составления алгебраических уравнений, связывающих непосредственно параметры систем с такими общими показателями процессов как амплитуда и частота колебаний.
Метод гармонической линеаризации особенно удобен для исследований автоколебательных систем, поскольку физические предпосылки, заложенные в основу метода, базируются именно на наличии периодического сигнала на входе нелинейной части системы.
Учитывая специфику исследуемой системы, которая совершает угловые перемещения, заданная нелинейная функция, при использовании метода гармонической линеаризации, примет вид:


где: A–амплитуда автоколебаний; φп– угол переключения, при котором происходит изменение полярности напряжения на рамке.
Необходимо отметить, что хотя q0 и q1 могут зависеть от амплитуды A и частоты Ω искомого решения, но эти величины являются постоянными, поскольку ищется именно периодическое решение. Для нахождений устойчивого периодического решения, на этапе предварительного анализа системы, удобно использовать частотный способ определения параметров периодического решения, основанный на исследовании амплитудно-фазовой частотной характеристики разомкнутой системы. Если разбивать систему на линейную часть и на нелинейную, то в соответствии с [3] можно написать выражение амплитудно-фазовой характеристики приведенной линейной части
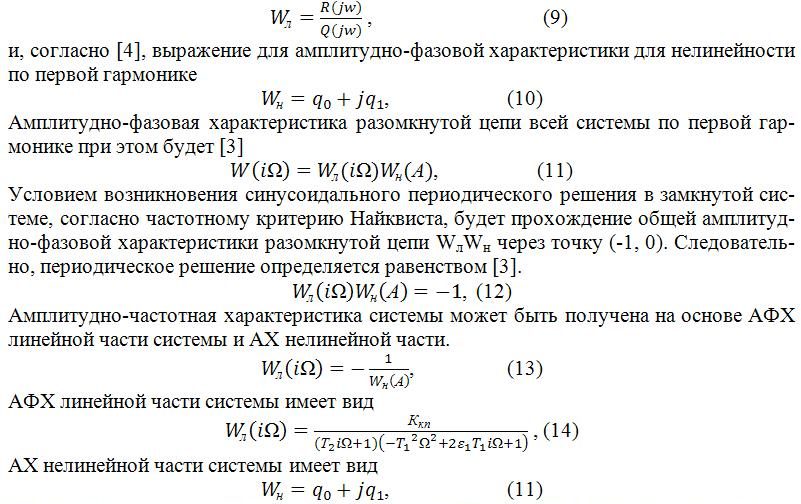

Таким образом, построив по отдельности кривых Wл и -1/Wн, найдем решение (пересечение кривых), которое будет соответствовать нахождению системы на колебательной границе устойчивости.
Для устойчивости периодического решения также требуется, чтобы характеристика Wл не охватывала точку характеристики -1/Wн с увеличенной амплитудой; т.е. требуется, чтобы направление отсчета значений А вдоль характеристики нелинейности -1/Wн в точке пересечения выходило изнутри амплитудно-фазовой характеристики приведенной линейной части Wл наружу.
Найдем решение, необходимое для нахождения системы на колебательной границе устойчивости.
Точка пересечения кривых на графике (рисунок 5) определяет искомое решение.
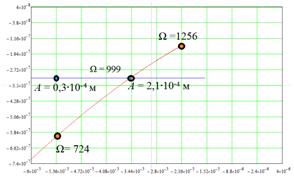

Рис. 5. АФХ линейной части и АХ нелинейной части системы
По рисунку 5 можно определить значения, при которых возможны параметров автоколебаний в системе:
Ω = 999 1/c =159 Гц,
A = 2∙10-4 м.
При проведении расчетов были использованы значения, которые показаны в таблице 1:
Таблица 1
Параметры модели прибора
|
Обозначение параметра |
Значение |
| Момент инерции системы, ∑, кг∙м2 | 1∙10-4 |
| Демпфирование системы, B∑ , Н∙м∙с∙рад-1 | 5∙10-6 |
| Ширина петли гистерезиса, xм , м | 20∙10—6 |
| Момент исполнительного устройства, Ми.у., Н∙м | 0.013 |
| Постоянная времени ИУ, T2, с | 10-7 |
| Величина напряжения, U, В | 5 |
В статье была синтезирована конструктивно-кинематическая схема и упрощенная математическая модель измерителя малых скоростей потока газа. Были найдены частота и амплитуда, при которых система будет находиться на колебательной границе устойчивости. Полученные при графоаналитическом решении значения, такие как амплитуда и циклическая частота, могут быть использованы при исследовании имитационной модели, где могут быть проанализированы точностные характеристики прибора. В дальнейшем, предлагается использовать магнитную муфту, посредством которой можно регулировать жесткость и демпфирование системы, что позволит изменять точку пересечения АФХ линейной части и АХ нелинейной части, а это, в свою очередь, даст возможность изменять диапазон измерений прибора.
Литература:
- Ободовский, Ю. В. Динамика электромеханических устройств с постоянными магнитами: автореферат диссертации на соискание ученой степени к.т.н. 01.02.06 /Ободовский Юрий Васильевич. СПб., 2004. — 110 с.
- Пальтов, И. П. Приближённые методы исследования нелинейных автоматических систем / И. П. Пальтов, Е. П. Попов. М.: Физматгиз, 1960. 792 с.
- Патент РФ 2014130395/28, 22.07.2014. Устройство для измерения скорости потока // Патент России № 2570229, 12.2015. Бюл. № 34. /Скалон А.И., Давидовский М.А., Баширов Р.Ф.
- Скалон, А.И. Теория и принципы построения компенсационных автоколебательных чувствительных элементов для систем управления: дис. На соиск. Учен. Степ. Канд. д-ра наук: спец. 05.13.05/ Скалон Анатолий Иванович. –СПб., 1994. –602 с.[schema type=»book» name=»РАЗРАБОТКА КОНСТРУКТИВНО-КИНЕМАТИЧЕСКОЙ СХЕМЫ И МАТЕМАТИЧЕСКОЙ МОДЕЛИ ИЗМЕРИТЕЛЯ МАЛЫХ СКОРОСТЕЙ ПОТОКОВ» description=»В статье рассмотрена разработка конструктивно-кинематической схемы и математической модели автоколебательного устройства с магнитной муфтой, наличие которой позволяет осуществлять передачу автоколебаний через границу разделу двух сред.» author=»Баширов Ренат Фикретович, Скалон Анатолий Иванович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-04-12″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.03.2017_03(36)_часть 1″ ebook=»yes» ]