

Постановка проблемы. При решении задач кинематического анализа промышленных роботов (ПР) с помощью ЭВМ требуются программы численного решения трансцендентных уравнений и дифференциальных уравнений, коэффициенты которых являются функциями времени.
Возникла необходимость создания метода, как последовательности простых вычислительных процедур для решения подзадач, с использованием стандартного пакета прикладных программ, обеспечивающего эффективное проектирование ПР. Обоснована целесообразность использования Mathcad для решения задач динамического анализа и моделирования движения манипулятора ПР.
Анализ литературы. Манипулятор ПР обычно представляет собой открытую кинематическую цепь, жесткие звенья которой соединены кинематическими парами пятого класса [2]. Если кинематическая цепь не содержит внутренних замкнутых контуров, то число кинематических пар n определяет число степеней подвижности манипулятора [1, 2]. Положение кинематической цепи манипулятора определяют с помощью обобщенных координат характеризующих относительные перемещения в кинематических парах [1, 2, 5, 6].
Рассматривают следующие задачи кинематического анализа манипулятора: первая задача кинематики (прямая задача о положении манипуляторов), вторая задача кинематики (обратная задача о положении манипуляторов); и задачи динамического анализа манипулятора: прямая и обратная задачи динамики [1, 2, 5, 6]. Решение обратной задачи о положении манипулятора проводится как на этапе проектирования, так и на этапе синтеза управляющих воздействий [2, 6]. Следует учесть, что для манипуляторов с большим числом степеней подвижности возможно несколько наборов обобщенных координат, обеспечивающих заданное положение особой точки. Выбор оптимального решения проводится исходя из дополнительных ограничений или критериев качества [2, 6].
Математическая модель манипулятора составляется методом Лагранжа-Эйлера или Ньютона-Эйлера, с представлением систем координат в разомкнутых кинематических цепях методом Денавита-Хартенберга [1, 2, 6].
Порядок системы дифференциальных уравнений для математической модели, составленной методом Лагранжа-Эйлера, соответствует числу обобщенных координат манипулятора [6], что может вызвать определённые трудности у студентов. В математической модели составленной методом Ньютона-Эйлера всего два уравнения: второй закон Ньютона и уравнение Эйлера для углового движения [6]. Однако, метод Лагранжа-Эйлера является более универсальным и чаще используется при моделировании движений ПР на ЭВМ [3].
В задачах дипломного проектирования рассматривается перемещение манипулятором ПР нагрузки (заготовки, инструмента, контрольно-измерительных приборов) по заданному закону движения [4]. В зависимости от назначения манипулятора на разных участках траектории ПР могут изменяться параметры нагрузки: геометрические размеры, форма, распределение масс [3, 4]. Эти особенности следует учесть на этапе составления математической модели, поскольку коэффициенты дифференциальных уравнений являются функциями обобщенных координат манипулятора и зависят от закона движения и параметров нагрузки.
Для решения данной задачи на ЭВМ можно использовать языки программирования (Fortran, Pascal, C) или математические пакеты (Matlab, Mathcad). Численные методы решения инженерных задач реализуются в среде прикладных программ Mathcad [3, 4], которая характеризуется возможностью решения линейных и нелинейных алгебраических, дифференциальных уравнений и систем уравнений; выполнением операций с векторами, матрицами и полиномами [2, 6].
Пакет прикладных программ Mathcad позволяет выполнить кинематический и динамический анализ, т. е. рассчитать координаты, скорость и ускорение звеньев [1, 3, 4]; вычислить силы и моменты, действующие на звенья; определить траекторию схвата манипулятора [1, 3, 4].
Цель статьи – разработка метода кинематического анализа манипулятора ПР в среде Маthсаd.
Исходными данными являются [4]:
- кинематическая схема манипулятора,
- геометрические размеры и плотности звеньев манипулятора,
- требуемый закон движения схвата манипулятора,
- начальное положение звеньев,
- информация о нагрузке.
C каждым звеном манипулятора свяжем правую декартову систему координат OiXiYiZi. Начало отсчета Oi расположим в центре шарнира, одну координатную ось направим по оси шарнира, вторую координатную ось направим вдоль оси симметрии звена, третья координатная ось дополняет систему до правой [4]. Движение манипулятора ПР определяется изменением во времени обобщенных координат , которыми являются углы поворота — во вращательных, и перемещения — в поступательных кинематических парах.
Составим алгоритм решения задачи кинематического анализа манипулятора с использованием пакета прикладных программ Маthсаd.
Кинематический анализ. Первая задача кинематики: задана кинематическая схема манипулятора и законы движения (законы изменения обобщенных координат ) требуется определить положение особой точки Р (например, полюса схвата) в системе отсчета, связанной со стойкой [2, 3, 5, 6].
Алгоритм решения:
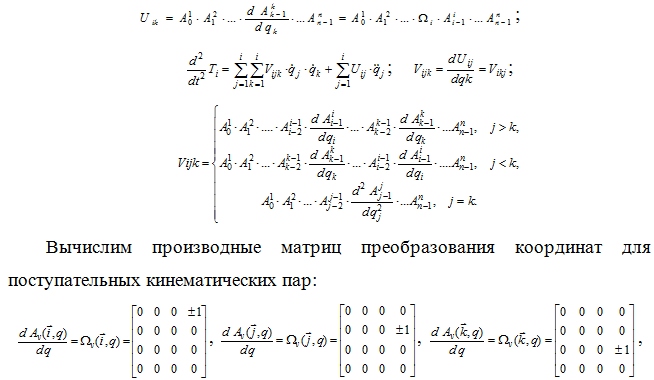
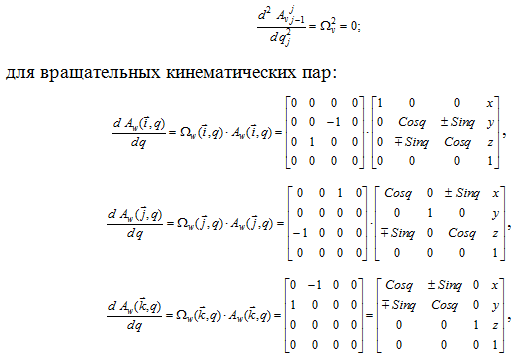
1) составим матрицы преобразования координат методом Денавита-Хартенберга [2] для поступательных кинематических пар:
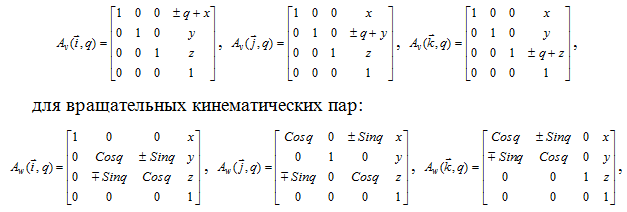

где x, y, z – координаты начала отсчета Oi+1 в системе координат OiXiYiZi.
2) на основании кинематической схемы манипулятора представим перемещение особой точки Р, как последовательность движений по каждой обобщенной координате. Составим цепочку перемещений от 0 – го звена (основания манипулятора) до n – го звена, относительно которого особая точка неподвижна. Например:
![]()

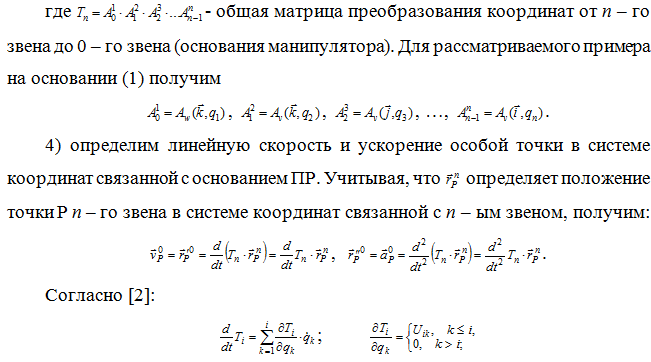
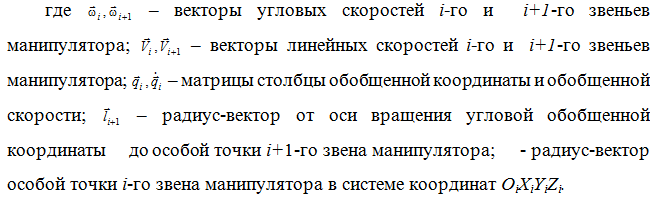
3) определим положение точки Р манипулятора в системе координат связанной с n – ым звеном и в системе координат связанной с основанием ПР
![]()






На этом алгоритм решения прямой задачи кинематики завершен.
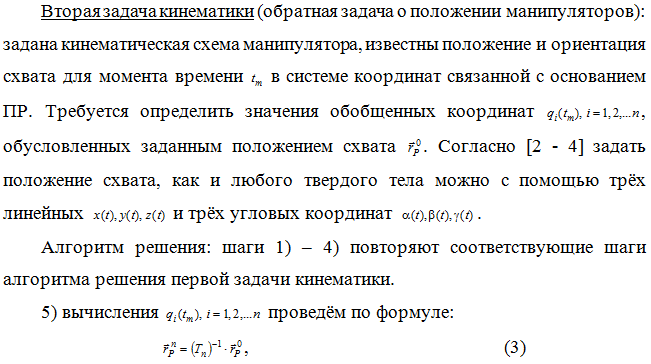

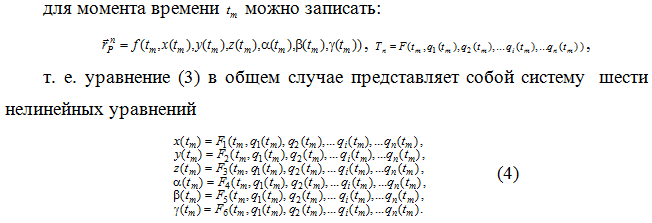

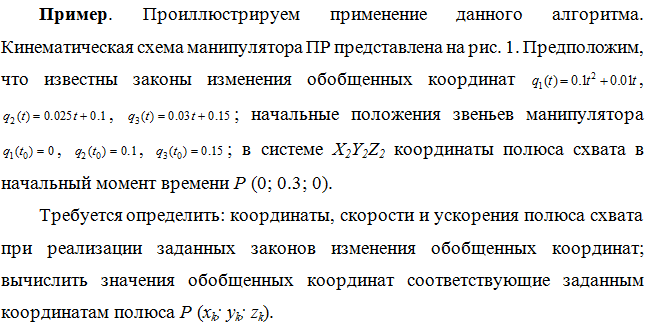

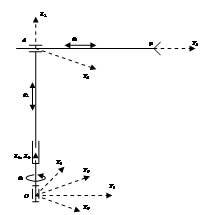

Рисунок 1. Кинематическая схема манипулятора.
Решение. В каждой кинематической паре введём правые системы координат XiYiZi. Составим цепочку перемещений от 0 – го звена (основания манипулятора) до 3 – го звена, относительно которого особая точка неподвижна:
![]()

Составим матрицы преобразования координат Денавита-Хартенберга [2, 3. 6] для манипулятора кинематическая схема которого приведена на рис. 1:


На рис.2 представлено решение прямой задачи о положении манипулятора с использованием пакета прикладных программ Mathcad.
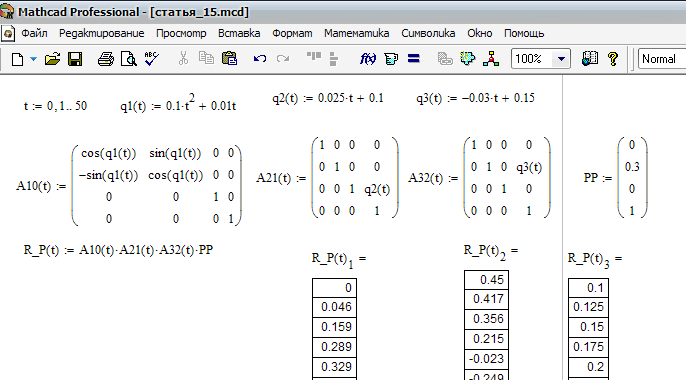

Рисунок 2. Решение прямой задачи о положении манипулятора с использованием пакета прикладных программ Mathcad.
Определим скорость и ускорение движения точки Р схвата манипулятора, выполняя операцию символьного дифференцирования вектора координат , (рис.3).
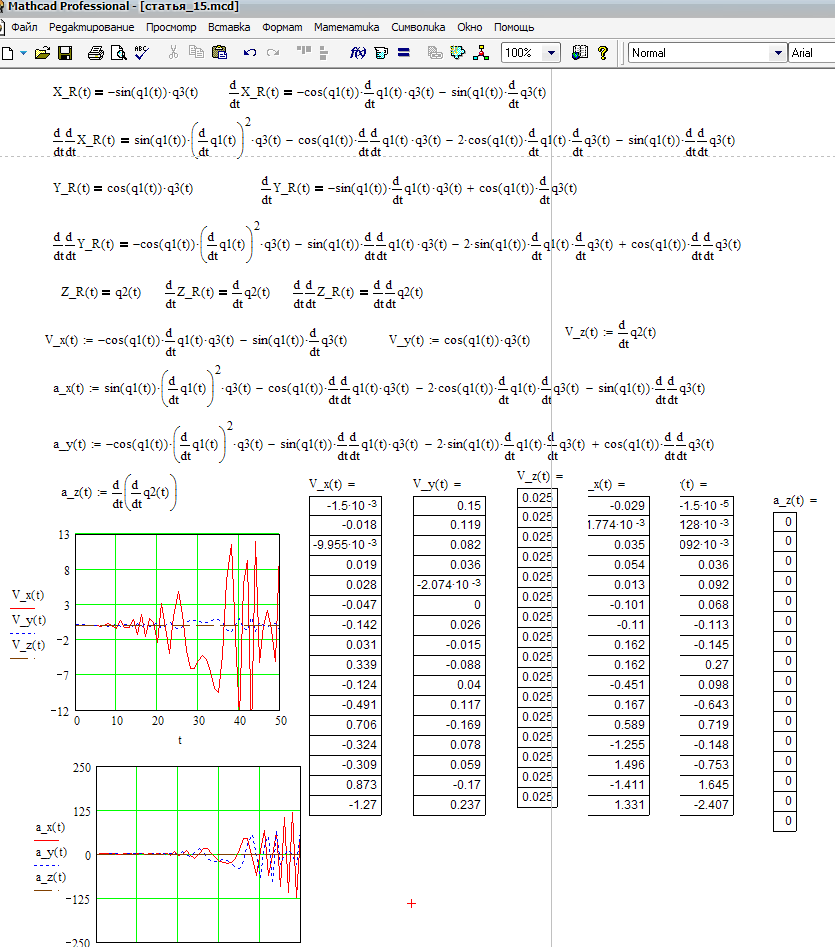

Рисунок 3. Определение скорости и ускорения движения точки Р схвата манипулятора с использованием пакета прикладных программ Mathcad.
Решение обратной задачи о положении манипулятора с использованием встроенной функции Given пакета прикладных программ Mathcad представлено на рис. 4.
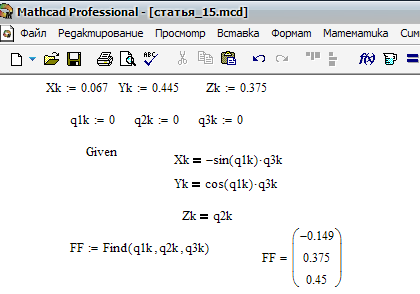

Рисунок 4. Решение обратной задачи о положении манипулятора с использованием пакета прикладных программ Mathcad.
Выводы. Проведение кинематического анализа по представленному алгоритму позволяет формализовать процесс вычислений, уменьшить затраты учебного времени и сократить количество ошибок.
Список литературы:
- АщепковаН. С. Моделирование и кинематический анализ кривошипно -шатунного механизма / Н. С. Ащепкова // Вісник НТУ “ХПІ”. – Харків: НТУ “ХПІ”. – 2014. – № 62. – С. 3–12. Механика промышленных роботов. Кн..1. Кинематика и динамика: учеб. пособие / Е. И. Воробьев, С. А. Попов, Г. И. Шевелёва. / под. ред. К. В. Фролова, Е. И. Воробьева. – К.: Вища школа, 1988. – 304 с.
- Бурдаков С. Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов / С. Ф. Бурдаков, В. А. Дьяченко, А. Н. Тимофеев // М.: Высшая школа, 1986. – 264 с.
- Котлярский Л. Н. MathСad. Решение инженерных и экономических задач / Л. Н. Котлярский – СПб.: Питер. – 2005. – 388 с.
- Кудрявцев Е. М. Mathcad 2000 Pro / Е. М. Кудрявцев – М.: ДМК Пресс. – 2001. – С. 530–540.
- Сокол Г. І. Теорія механізмів робототехнічних систем. Кінематика: Навч. посібник / Г. І. Сокол. – Дніпропетровськ: РВВ ДНУ, 2002. – 92 с.
- Шахинпур М. Курс робототехники. Пер. с англ. / М.Шахинпур. –М.: Мир, 1990.–527 с.[schema type=»book» name=»КИНЕМАТИЧЕСКИЙ АНАЛИЗ МАНИПУЛЯТОРА С ИСПОЛЬЗОВАНИЕМ MATHCAD» description=»Определены особенности составления математических моделей при использовании пакета прикладных программ Mathcad. Рассмотрен пример решения прямых и обратных задач кинематики для трёхзвенного манипулятора, работающего в цилиндрической системе координат. Ил.: 4. Библиогр.: 10 назв.» author=»Капера Сергей Сергеевич, Ащепкова Наталья Сергеевна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-02″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_27.06.2015_06(15)» ebook=»yes» ]