

Аппаратура авиационных потребителей (АП) спутниковых радионавигационных систем (СРНС) типа ГЛОНАСС и GPS, работающих в дециметровом диапазоне волн (l » 20 см), изначально разрабатывалась для сопровождения трассовых полётов. В настоящее время возникла необходимость расширить функции АП для выполнения полетов на малых высотах, захода на посадку и категорированной посадки. При этом возникает необходимость учёта влияния отражений от подстилающей поверхности Земли на безопасность полётов.
Моделирование помех, обусловленных отражениями от подстилающей поверхности, предполагает принятие определенной модели последней. Наиболее часто используется модель Бэкмана [1, 2], в рамках которой шероховатая земная поверхность представляется состоящей из плоских элементов (граней) с произвольным наклоном (рисунок 1).
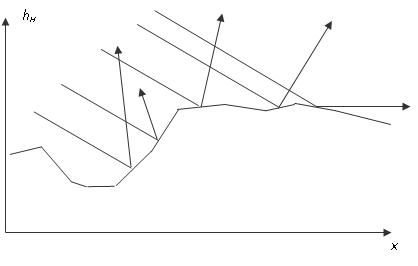

Рисунок 1 — К объяснению модели Бэкмана
При этом полагается, что каждая грань отражает луч, падающий на нее, с коэффициентом отражения Френеля только в локальном зеркальном направлении, что справедливо при длине граней l >> l. С учетом того, что принята длина волны l » 20 см, такое допущение справедливо для большинства реальных поверхностей. Парциальные волны, отраженные в одном направлении (гранями с одинаковым наклоном), суммируясь, образуют результирующую волну в том же направлении. При этом поверхность, состоящая из произвольных плоских граней, может быть описана марковским процессом с конечным числом состояний и дискретными моментами перехода [1].
Плотность вероятностей распределения высот неровностей hн полагается нормальной 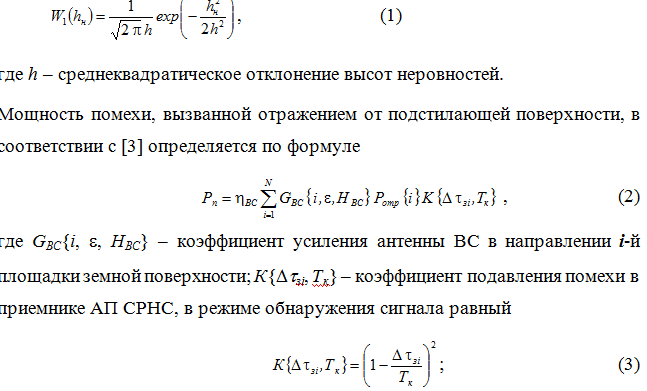

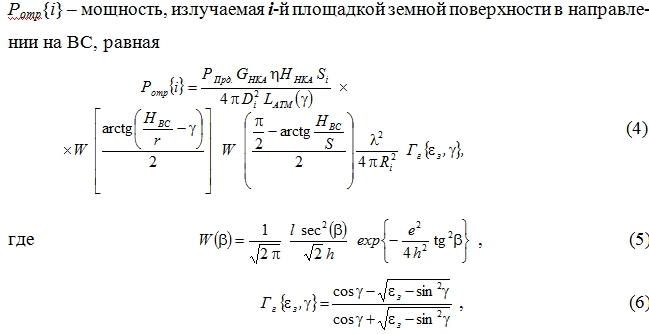

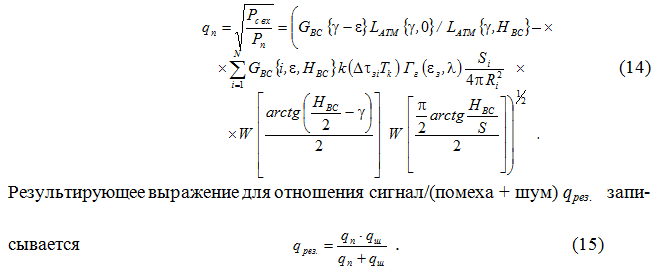
PПрд — мощность передатчика навигационного космического аппарата (НКА); ri и Si – координаты центра i-й площадки переотражения; Dtзi – время задержки отраженного сигнала от i-й площадки; Тк – время корреляции элемента дискретного сигнала, используемого в канале передачи данных; Di – расстояние между центром i-й площадки и НКА; LATM(g) – потери в атмосфере; Ri – расстояние от центра i-й площадки до ВС; W(b) – плотность вероятностей угла наклона i-й площадки по отношению к горизонту; l – интервал корреляции неровностей поверхности; Гг – коэффициент отражения для горизонтальной составляющей поляризации волны; eз – диэлектрическая проницаемость почвы; g — угол места НКА, e— угол крена ВС в сторону НКА.
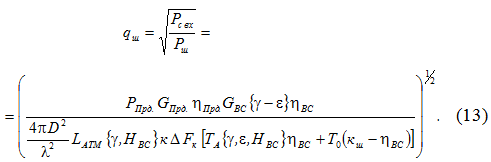
Предполагается, что в качестве приемной антенны используются расположенные скрещенные щели с максимальным коэффициентом усиления при b = 0° равным G(0) = 6,1 дБ и шириной диаграммы направленности по уровню –3 дБ равной 168°. При этом коэффициент усиления антенны записывается [4]:
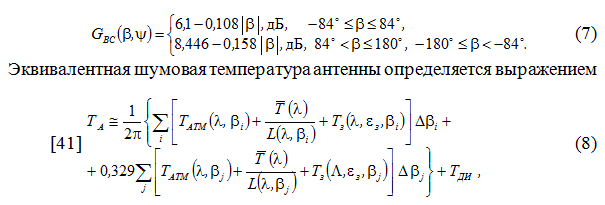

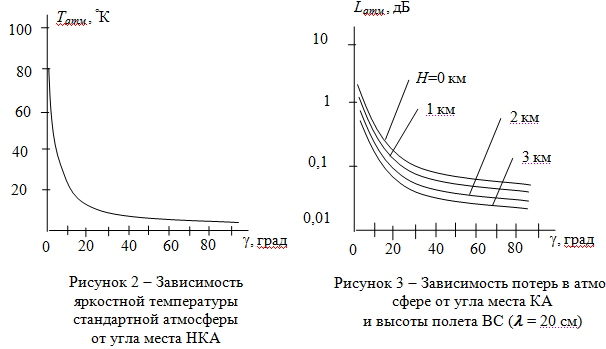
где ТАТМ(l, bi) — яркостная температура атмосферы в направлении bi для данной длины волны l; — усредненная по небосводу яркостная температура галактических источников шума; Тз(l, eз, bi) — яркостная температура поверхности Земли в направлении bi при данных значениях длины волны l и диэлектрической проницаемости почвы eз ; ТДИ — составляющая шумовой температуры антенны, обусловленная радиоизлучением дискретных источников; bi , bj — текущие значения углов, соответствующие i—му и j—му интервалам; Dbi и Dbj — интервалы усреднения, в пределах которых яркостная температура принимается постоянной; L(l, bi) — ослабление сигнала в атмосфере в направлении bi . Зависимость яркостной температуры атмосферы ТATM от угла места НКА относительно ВС в диапазоне 1,5ГГц (l = 20 см) представлена на рисунке 2. Из рисунка видно, что яркостная температура атмосферы достаточно быстро падает при возрастании угла места.
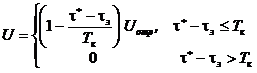
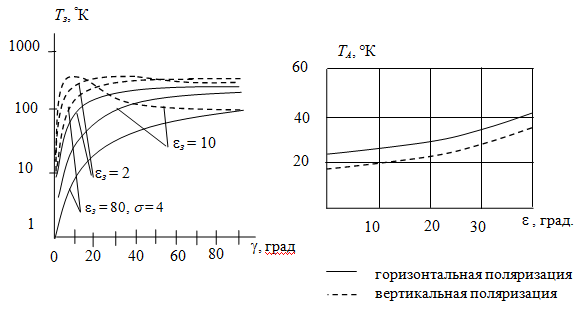
Зависимость ослабления сигнала в атмосфере в диапазоне 1,5 ГГц при различных высотах полета ВС и углах места НКА относительно ВС представлена на рисунке 3. Из рисунка видно, что с ростом высоты полета ВС и угла места НКА ослабление сигнала в атмосфере уменьшается. Зависимость яркостной температуры поверхности Земли в диапазоне 1,5 ГГц для горизонтальной и вертикальной поляризаций при различных углах места НКА относительно ВС и различных значениях диэлектрической проницаемости почвы eз представлены на рисунке 4. Яркостная температура галактических источников шума при расчетах принята равной10° К.

Эффективная шумовая температура дискретных источников складывается из шумовых температур отдельных источников и определяется соотношением, основанном на том, что шум на выходе системы определяется суммой вкладов от них, суммируемых с весами, равными доле мощности, излучаемой антенной в телесном угле данного источника:


где — яркостная температура, усредненная по поверхности дискретного источника; L(l, bДИ , yДИ) и GВСi(bДИ , yДИ) – ослабление сигнала и усиление приемной антенны ВС в направлении НКА.
При расчетах радиоизлучений дискретных источников рассмотрим случаи максимального и минимального радиоизлучения. Максимальное радиоизлучение характерно для больших углов места НКА. относительно ВС, а минимальное — для малых. В первом случае принимаем GВСi(bДИ , yДИ) = 4; L(l, bДИ , yДИ) = 0,05 дБ, а во втором GВСi(bДИ , yДИ) = 0,5; L(l, bДИ , yДИ) = 3 дБ. Для Солнца в диапазоне 1,5 ГГц средняя яркостная температура Тс(W), приведенная к среднему видимому телесному углу DWс = 0,22 град.2, лежит в пределах 105 — 2 105к. Для Луны видимый угловой размер равен 30°, а средняя яркостная температура = 225°К для диапазона 1,5 ГГц [5]. Расчеты по формуле (9) показали, что эффективная шумовая температура Солнца лежит в пределах 0,04° — 1,35°К, а Луны 0,08° — 1,25°К. Таким образом, за счет широкой диаграммы направленности приемной антенны шумовым вкладом дискретных источников можно пренебречь.
Результаты расчета эффективной шумовой температуры по формуле (8) для диаграммы направленности антенны для различных углов крена ВС представлены на рисунке 5. Из рисунка видно, что с ростом угла крена ВС уровень шума несколько увеличивается за счет приема дополнительного шумового излучения земной поверхности.
Одним из факторов, снижающих достоверность передачи данных по дискретному каналу радиосвязи, является многолучевое распространение за счет переотражений от земной поверхности. Вопросы влияния многолучевого распространения на качество радиоприема рассматривались в работах [6 — 9]. Спецификой многолучевого распространения сигналов дискретных сигналов является то, что амплитуда отраженного сигнала зависит от его задержки. Причем, в режиме обнаружения эта зависимость имеет вид:

где t* — оценка времени задержки (в режиме обнаружения оценка проводится в диапазоне априорной неопределенности путем последовательного перебора всех возможных задержек с дискретом Тк/2); Тк — ширина автокорреляционной функции элемента сигнала; tз — время задержки отраженного сигнала; Uотр — амплитуда отраженного сигнала.
 |
|||||
|
|||||
|
|||||

В соответствии с формулой (10) отраженные сигналы, задержанные более чем на Тк относительно прямого сигнала, практически не создают помех на выходе коррелятора при используемой, как правило, корреляционной обработке, В режиме слежения следует рассматривать два сигнала, которые получаются за счет сдвигов «раньше», «позже» на Тк/2 относительно оценки t*. Очевидно, что многолучевое распространение будет оказывать большее влияние на сигнал типа «позже». При этом амплитуду отраженного сигнала на выходе коррелятора в этом режиме можно записать так:
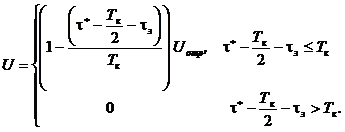

Отсюда видно, что на выходе коррелятора будут подавляться практически полностью отраженные сигналы, задержанные более чем на (3Тк)/2.
На основании формул (10) и (11) можно рассчитать зоны отражения от поверхности Земли, которые участвуют в формировании помех на выходе коррелятора. При этом размер указанных зон для режима слежения будет несколько большим и следовательно будет выше уровень помех. Приведенное выше выражение (41) для мощности отраженного сигнала было получено в рамках этой модели.
Мощность сигнала на входе приемника, размещаемого на ВС, определяется выражением

где РПрд. — мощность передатчика НКА; GПрд. — коэффициент усиления антенны Прд.; hПрд. и hВС — коэффициенты потерь в антенно-фидерном трактах Прд. и ВС; GВС{g — e} — коэффициент усиления антенны ВС в направлении НКА; e — угол крена ВС в направлении НКА; g — угол места НКА относительно ВС; D — расстояние между НКА и ВС; l — длина волны; LATM{g, HBC} — потери в атмосфере; НВС — высота полета ВС. Отношение сигнал/шум по напряжению на выходе приемокоррелятора вычисляется по формуле

Выражение для отношения сигнал/помеха записывается в виде

Отличие помехи многолучевого распространения от шумов состоит в том, что она является коррелированной. Причем, корреляционная функция, в первом приближении, может быть аппроксимирована выражением


где V — путевая скорость движения ВС, l — интервал пространственной корреляции высот неровностей. Результаты расчетов результирующего отношения сигнал/(помеха + шум) в режиме слежения при сдвиге «вправо» и «влево» представлены на рисунке 6 для различных высот полета, углов места НКА относительно ВС g и углов крена ВС e.
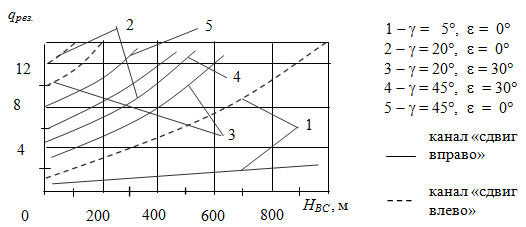

Рисунок 6 — Зависимость отношения сигнал/(помеха + шум)
от угла места НКА, высоты полета и угла места ВС
Список литературы:
- Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы радиовысотомерии. — М.: Советское радио, 1979.
- Король В.М., Шатраков Ю.Г. Основы радионавигации. ГУАП, СПб., 2011, 100 с.
- Олянюк П.В. Спутниковые навигационные системы .АГА, СПб, 2008г, 98 с.
- Энергетические характеристики космических радиолиний. Под ред. О.А.Зенковича. — М.: Советское радио, 1972.
- Beckman P., Spizzictino A. The seattering of electromagnetic waves from rough surface. Pergamon Press. N.J., 1963.
- Hahsen A. The NSTB: A Stepping Stone to WAAS, GPS World, June 1998.
- Khall M.A. GPS multiptipath error aerspace symposium. Atlantic — City, 25 — 27 Okt. 1978.
- Loh R., Nii Aileen S. Wide Area Augmentation System (WAAS). Design for Growh in both National and International Environments, DSNS-96, St. Petersburg, May 1996.
- Specification Wide Area Augmentation System (WAAS), U.S.Department of Transport, Federal Aviation Administration, FAA-E-2892 B, March 10, 1997.[schema type=»book» name=»ВЛИЯНИЕ ОТРАЖЕНИЙ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ НА КАЧЕСТВО ФУНКЦИОНИРОВАНИЯ АППАРАТУРЫ ПОТРЕБИ-ТЕЛЕЙ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ» description=»Расширение функций аппаратуры потребителей спутниковых радионавигационных систем для использования при выполнения полетов на малых высотах, захода на посадку и категорированной посадки требовало учёта погрешностей навигационных расчётов, вызываемых отражением радиосигналов от подстилающей поверхности Земли. В работе проводится анализ влияния отражений от подстилающей поверхности Земли, шумов атмосферы, и космических шумов, а также динамики полета воздушного судна на качество функционирования размещаемой на нем аппаратуры потребителей спутниковых радионавигационных систем.» author=»Евтушенко Олег Александрович, Ермошенко Юлия Марковна» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-02″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_27.06.2015_06(15)» ebook=»yes» ]