

Микроконтроллерные и микропроцессорные устройства управления и телеметрии являются неотъемлемой частью цифровых систем управления электроприводами. В результате технического развития модернизировалась и структурно-функциональная схема систем управления – появились жидкокристаллические символьно-графические дисплеи, устройства клавиатурного ввода, стандартизированные цифровые протоколы обмена данными между функциональными узлами системы и устройствами дистанционного управления, появилась возможность корректировки алгоритма и параметров в режиме реального времени [1, c.17][2, c.14]. (Рисунок.1)
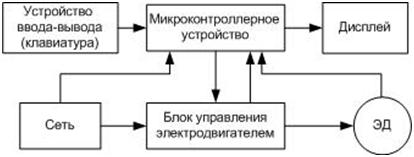

Рисунок 1. Структурная схема цифровой системы управления электроприводами
В данной статье предлагается вариант цифровой системы управления электроприводами с функцией выбора алгоритма и параметров. Основным силовым элементом служит полностью управляемый инвертор напряжения, схемы сопряжения которого с разными типами электродвигателей представлены на Рисунке 2. Данный управляемый инвертор позволяет коммутировать большинство типов электродвигателей без изменения внутренней структурной схемы самого инвертора.
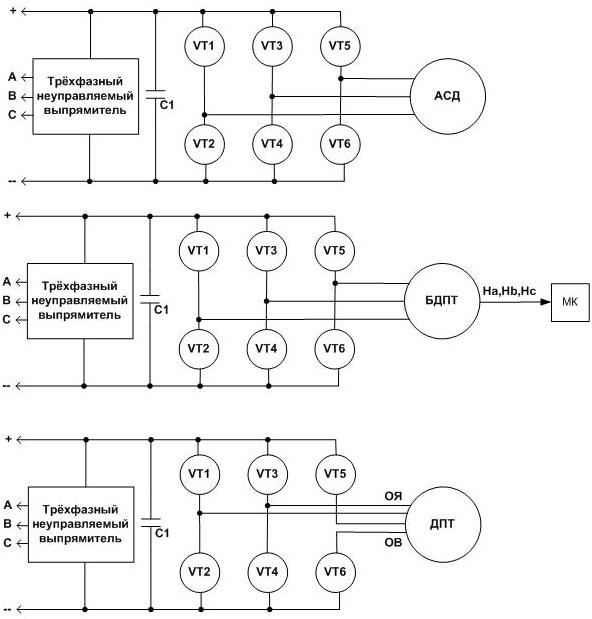

Рисунок 2. Схемы сопряжения управляемого инвертора с различными электродвигателями.
A,В,С – вводы питания для трёхфазная сети переменного напряжения; +,- – вводы питания для сети постоянного тока; С1 – фильтр питания, VT1÷ VT6 – полностью управляемые мощные высоковольтные ключи БТИЗ (биполярные транзисторы с изолированным затвором); АСД – асинхронный двигатель с короткозамкнутым ротором; БДПТ – бесконтактный двигатель переменного тока; Ha, Hb, Hc – сигналы датчиков Холла; МК – микроконтроллерное устройство; ОЯ – обмотка якоря; ОВ – обмотка возбуждения; ДПТ – двигатель постоянного тока. Данный вариант управляемого выпрямителя способен работать как от сети трёхфазного переменного напряжения, так и от сети постоянного напряжения, без дополнительных коммутаций и переделки структурной схемы. Сопряжение двигателей с выпрямителем происходит программно, при начальном выборе требуемого алгоритма и параметров. В качестве устройства ввода возможно применение стандартной клавиатуры AT либо PS/2 формата. В качестве дисплея вывода данных может выступать любой символьно-графический жидкокристаллический дисплей отечественного или импортного производства. В частности данная схема была реализована на следующих готовых элементах – микроконтроллер семейства Microchip PIC16F877, соединённый через встроенный в микроконтроллер протокол обмена данных SPI (Serial Peripheral Interface) с алфавитно-цифровым ЖК-модулем MT-10S1 фирмы МЭЛТ, а также клавиатуру стандарта AT, подключенную через встроенный в микроконтроллер протокол обмена данных USART (Универсальный асинхронный приёмо-передатчик). Управляемый инвертор был выполнен на мощных MOSFET-транзисторах IRFP250, а связь микроконтроллера с затворами силовых ключей реализована с помощью драйверов полумоста IR2102. На рисунке 3 представлен алгоритм программного кода, написанного на языке низкого уровня ASSEMBLER.
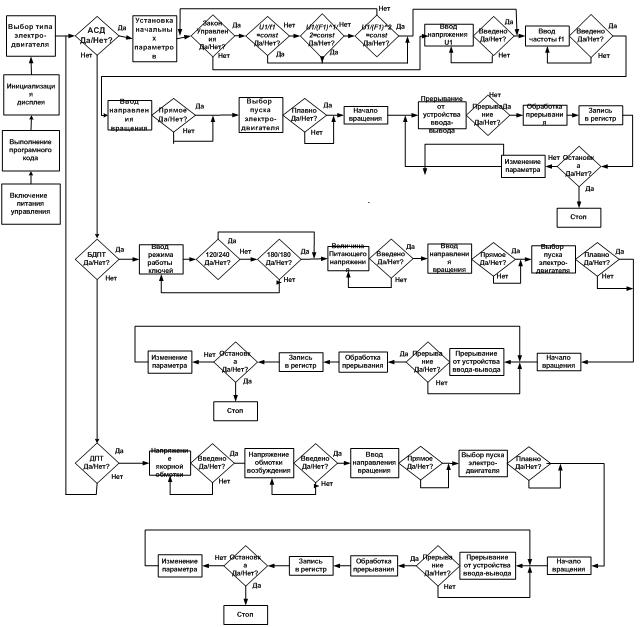

Рисунок 3.Алгоритм работы программного кода цифровой системы управления электроприводами.
Список литературы:
- В.И.Мелешин. Транзисторная преобразовательная техника, Москва: Техносфера, 2006.- 632 с.
- Гопал К.Дюбей. Основные принципы устройства электроприводов, Москва: Техносфера, 2009.[schema type=»book» name=» ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ С ФУНКЦИЕЙ ВЫБОРА АЛГОРИТМА И ПАРАМЕТРОВ» author=»Едгулов Марис Муаедович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-27″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.04.2015_4(13)» ebook=»yes» ]