

На рубеже 90-х годов 20 в. существенно изменились приоритеты в разработке космических аппаратов. Преимущество получило создание малых космических аппаратов по сравнению с крупногабаритными и
тяжелыми КА (массой более 3 т).
На рис. 1 показана тенденция снижения количества запускаемых тяжелых КА по годам. Согласно сложившийся классификации [1] к тяжелым, средним и легким КА относятся аппараты массой более 500 кг.
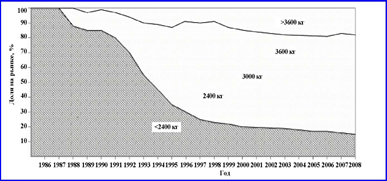

Рис.1. Доля запущенных тяжелых КА по годам
Малый космический аппарат − это не только малая масса, энерговооруженность и стоимость, но и переход на следующую ступень развития космической техники. Создание МКА отличается увеличением доли миниатюризации электроники и вычислительной техники, наличием новых подходов в организации архитектуры КА и процесса проектирования, изготовления, испытаний, запуска и обеспечения надежного функционирования КА в сочетании с широким применением унификации и новейшей электронной базы серийного производства [2].
Анализ современных методов построения информационно-измерительных комплексов перспективных МКА ВН, маневрирующих в условиях действия внутренних шумов и внешних возмущающих воздействий различной физической природы, показывает, что их основу должна составлять инерциальная навигационная система (ИНС).
Перспективным способом построения инерциальной навигационной системы подвижных объектов является использование БИНС. Потенциальные преимущества БИНС по сравнению с навигационными системами платформенного типа отмечались уже в работах начала 60-х годов. К ним относили: отсутствие сложной электромеханической системы − ГСП, уменьшение габаритов, массы и энергопотребления, повышение надежности, сокращение времени начальной выставки, повышение универсальности системы, меньшая стоимость системы, упрощение решения задачи резервирования и контроля работоспособности системы и ее элементов, отсутствие ошибок, обусловленных погрешностями стабилизации гироплатформы и неточностью изготовления карданова подвеса. Также БИНС легче комплексируются с навигационными приборами и системами ориентации, работающими на других физических принципах [3].
Однако практическая реализация всех этих преимуществ БИНС связана с решением двух основных задач: миниатюризация средств бортовой вычислительной техники, создания измерительного модуля с приемлемой для навигации точностью и существенно увеличенным динамическим диапазоном измерений.
Для решения этих задач при создании системы навигации приемлемых размеров, цены и массы она должна быть создана с использованием датчиков на базе MЭМС−технологий. В зависимости от состава инерциальных чувствительных элементов БИНС могут быть построены с применением следующих приборов: только акселерометров [3,4,5], трех одноосных гиростабилизаторов (ОГС), трех акселерометров и трех датчиков угловой скорости (ДУС) [3].
Таким образом, возникает необходимость выбора способа приборной реализации БИНС и формулировки требований к основным техническим характеристикам датчиков, входящих в её состав.
В соответствии с физическими свойствами носителей навигационной информации навигационные системы могут быть подразделены на следующие классы: системы навигации по наземным ориентирам, системы астронавигации, системы радионавигации, радиолокационные навигационные системы, акустические навигационные системы, тепловизионные навигационные системы, системы магнитной навигации, рельефометрические навигационные системы, инерциальные навигационные системы.
Данная классификация не является исчерпывающей. Кроме того, на практике перечисленные системы могут использоваться в различных комбинациях друг с другом. Так, широкое применение нашли астроинерциальные и радиоинерциальные навигационные системы. Перспективным видом навигационных систем являются инерциальные системы.
Принцип инерциальной навигации по своей сущности достаточно прост и состоит в возможности наблюдать факт ускоренного движения объекта навигации и измерять параметры этого движения в абсолютном (инерциальном) пространстве с помощью размещенных на oбъекте измерительных приборов, чувствительным элементом которых является инерционная масса, укрепленная в корпусе прибора на упругом подвесе и имеющая возможность смещаться из своего нейтрального положения вследствие ускоренного движения объекта навигации. Поскольку смещения чувствительного элемента вызваны его инерционностью, то подобные измерительные приборы, как и сам принцип навигации получили название инерциальных.
Простейшая схема такого прибора, называемого пружинным акселерометром (измерителем ускорений), изображена на рис. 2


Рис.2. Схема пружинного акселерометра
Измерительные приборы, содержащие чувствительный элемент в виде инерционной массы, используются главным образом для определения параметров поступательного движения объектов − ускорения, скорости, пройденного пути. По этой причине их называют также датчиками линейных перемещений. Как будет показано, датчики линейных перемещений могут быть применены и для определения параметров вращательного движения — угловой скорости и углового ускорения.
Остановимся на рассмотрении БИНС, построенных с использованием только акселерометров, более подробно.
Классическая схема построения инерциальной системы навигации и ориентации содержит блоки акселерометров и датчиков угловых скоростей, центр которой практически совпадает с центром масс КА (рис.3), а оси чувствительности датчиков сонаправлены с осями связанной системы координат КА.
Известно, что возможно построение акселерометрического инерциального блока [2,4] с использованием только акселерометров. Такой подход – исключение из инерциального блока датчиков угловых скоростей – является одним из путей снижения массогабаритных параметров, но требует достаточно высоких точностных параметров применяемых акселерометров.
В акселерометрических инерциальных блоках информацию о движении космического аппарата относительно центра масс определяют по сигналам акселерометров.
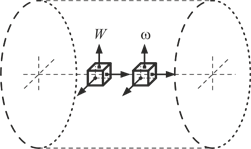

Рис.3. Классическая схема построения инерциальной системы
В этом случае на каждую ось связанной системы координат устанавливают не менее двух акселерометров. Известны два способа расположения осей чувствительности акселерометров для получения информации о угловом движении [4,6].
В первом способе (рис.4,а) вдоль каждой оси связанной системы координат устанавливается пара акселерометров АХ1 и АХ2, оси чувствительности которых перпендикулярны этой оси.
Акселерометры АХ1 и АХ2, находятся на расстоянии l от продольной оси КА. Пользуясь рис.4,а находим показания акселерометров:
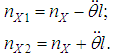

Складывая и вычитая уравнения (1) получаем кажущееся ускорение КА nX и угловое ускорение ![]()


Величина nX , совместно с аналогично полученной nY, используется для решения задачи навигации. Угол поворота θ определяется двойным интегрированием второго равенства (2) с учетом начального значения θ(t0).
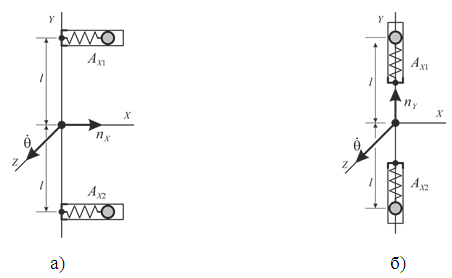

Рис.4. Расположение акселерометров
Во втором способе (рис.4,б) на каждую ось КА также устанавливается два акселерометра, однако оси чувствительности последних параллельны соответствующей оси КА. Показания акселерометров для второго способа имеют вид:
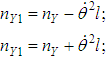

Из уравнений (3) нетрудно выразить кажущееся ускорение nY и угловую скорость :

Интегрируя второе выражение (4), с учетом θ(t0), можно определить угол тангажа θ. Недостатком этого способа является трудность определения знака угловой скорости [6]. Однако для определения параметров ориентации необходимо производить однократное интегрирование в отличие от первого способа.
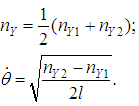
Из выражений (2) и (4) видно, что при увеличении плеча l позволит повысить чувствительность блока акселерометров к измерению угловой скорости КА. Увеличить плечо l в инерциальном блоке можно, если блоки акселерометров разнести по элементам конструкции корпуса КА, например, как показано на рис.5.
В этом случае для определения углового положения используется комбинированный способ расположения осей чувствительности акселерометров. Информацию об угловом движении можно получить обрабатывая информацию, полученную со всех блоков акселерометров.
Для определения угловой скорости используется информация:
по тангажу:
-первый способ – акселерометры расположенные на оси Y ;
-второй способ – акселерометры расположенные на оси X;
по рысканию:
-первый способ – акселерометры расположенные на оси Z;
-второй способ – акселерометры расположенные на оси X;
по крену:
-первый способ – акселерометры расположенные на оси Y ;
-второй способ – акселерометры расположенные на оси Z.

Рис.5. Расположение акселерометров
Оценим по порогу чувствительности акселерометра порог чувствительности измерения угловой скорости. Согласно [7], порог чувствительности акселерометра это минимальное изменение измеряемого ускорения, вызывающее закономерное изменение выходного сигнала. Порог чувствительности акселерометрического инерциального блока к угловым движениям КА определяется порогом чувствительности применяемых акселерометров и расстоянием между акселерометрами.
Решив уравнение угловой скорости (4) при размере плеча равного 1 метр, учитывая типовое значение порога чувствительности акселерометра, изготовленного по традиционным технологиям ~10–6 м/с2 [4], получим значение порога чувствительности измерения угловой скорости ~10–2 град/с, что в целом на порядок хуже порога чувствительности типового датчика угловой
скорости [4].
На основании общих требований, предъявляемых к акселерометрическому инерциальному блоку МКА, скорректируем требования к основным техническим характеристикам акселерометров [4]:
– порог чувствительности – не более 10-6 м/с2 ;
– диапазон измерений линейного ускорения – до 10g;
– массогабаритные характеристики (МГХ): не более 50 г, 30×30×30 мм;
– смещение нуля – (1 ¸ 5)*10-4g;
– нестабильность коэффициента преобразования – 0,05 %.
СПИСОК ЛИТЕРАТУРЫ
- Международные тенденции создания и эксплуатации малых космических аппаратов / В.И. Лукьященко, В.К. Саульский, В. А. Шучев [и др.] // Ш Международная конференция — выставка « Малые спутники» 27 — 31 мая 2002. г. Королев, Моск. обл. ЦНИИМАШ. — Кн. 1.
- Малые ИСЗ стран мира. Обзор. — М: НТЦ «Компас», 1996.
- Соколов С.В., Погорелов В.А. Основы синтеза многоструктурных бесплатформенных навигационных систем / Под ред. В. А. Погорелова. – М.: ФИЗМАТЛИТ, 2009. – 184 с.
- Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем / Под общ. ред. В. Я. Распопова. – СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. – 280 с.
- Разоренов Г.Н. Системы управления летательными аппаратами – М.: Машиностроение, 2003. – 584 с.
- Селезнев В.П. Навигационные устройства. – Машиностроение, 1974. – 600 с.
- ГОСТ 18955-73. Акселерометры низкочастотные линейные. Термины и определения.[schema type=»book» name=»ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К АКСЕЛЕРОМЕТРИЧЕСКОМУ ИНЕРЦИАЛЬНОМУ БЛОКУ МКА » description=»В данной статье рассмотрены анализ современного состояния и перспектив развития малых космических аппаратов военного назначения (МКА ВН), современные системы навигации МКА ВН, представлен обзор современных бесплатформенных инерциальных навигационных систем (БИНС), их состава и конструктивных особенностей, сформулированы требования к основным техническим характеристикам датчиков первичной информации.» author=»Ключников Алексей Игоревич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-01-04″ edition=»euroasia-science.ru_29-30.12.2015_12(21)» ebook=»yes» ]