

Введение. В настоящее время при решении навигационной задачи подвижных объектов на основе спутниковых измерений используются или различные модификации метода наименьших квадратов (МНК), или разнообразные варианты фильтра Калмана [1,2]. МНК используется для определения решения на текущий момент времени (мгновенное позиционирование), а фильтр Калмана – для сглаживания траектории движения и устранения «выбросов» координат относительно оцениваемой траектории движения.
Точность определения параметров движения объекта при использовании последнего оказывается выше, чем в МНК, но требует обязательного знания уравнений движения каждого конкретного объекта. Это принципиально затрудняет использование существующих калмановских навигационных алгоритмов в подавляющем большинстве подвижных объектов, когда неизвестны ни траектория движения, ни вид физической модели, ни характер действующих на объект возмущений и т.д. В то же время, очевидно, что применение методов стохастической фильтрации для обработки спутниковых измерений в самом общем случае их использования позволит значительно повысить точность определения навигационных параметров в силу ухода от различных упрощающих допущений (линеаризации, дополнительной информации об объекте, о помехах и т.п.), используемых в существующих алгоритмах спутниковой навигации.
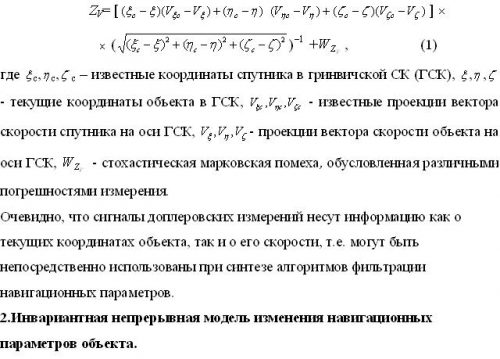
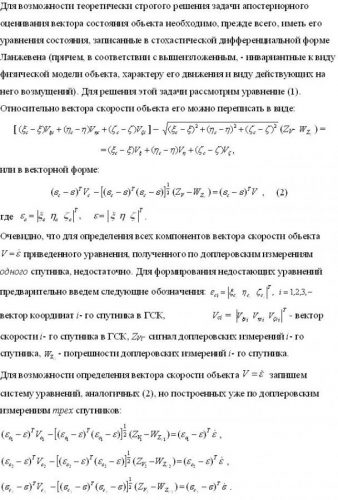
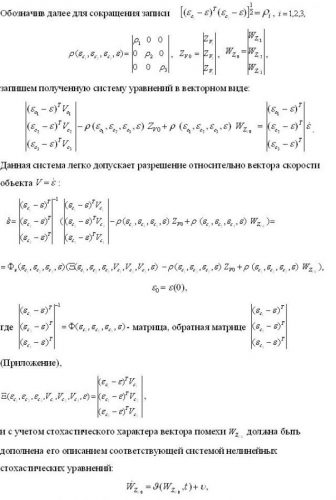
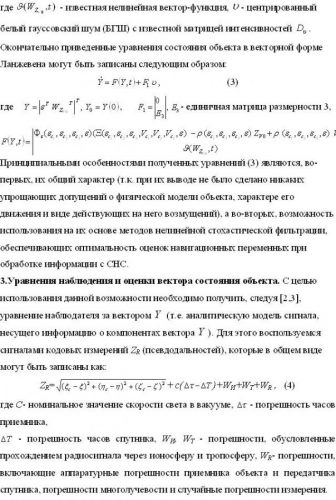
1.Постановка задачи. Проанализируем принципиальную возможность апостериорного стохастического оценивания навигационных параметров подвижных объектов по спутниковым измерениям для любых подвижных объектов. Формируемые при этом алгоритмы фильтрации должны быть инвариантны к виду физической модели объекта, изменению во времени параметров его движения, характеру возмущений и пр. и не зависеть от вида используемого режима спутниковых измерений. Для подобного построения данных алгоритмов рассмотрим возможность использования кодовых и доплеровских измерений спутниковых навигационных систем (СНС). При этом решение поставленной задачи рассмотрим для СНС с высокой частотой поступления навигационных сообщений, позволяющей считать характер спутниковых измерений по отношению к динамике изменения навигационных параметров объекта непрерывным. (В настоящее время частота приема спутниковых сообщений в отдельных приемниках GPS уже составляет 100 Гц, с тенденцией к последующему ее увеличению [4].)
Заключение. Рассмотренный подход к решению задачи спутниковой навигации на основе нелинейного стохастического фильтра, инвариантного к виду объекта и характеру его движения, помимо известных преимуществ фильтра Калмана перед традиционной схемой обработки спутниковых сообщений на основе МНК, позволяет также:
— сократить минимально необходимое число спутников с 4-х до 2-х,
— убрать навигационный вычислитель с базовой станции,
— обеспечить инвариантность сигнала наблюдения координат объекта к наиболее существенным помехам спутниковых измерений: погрешностям часов объекта, базовой станции и спутника, а также погрешностям, обусловленным прохождением радиосигнала через ионосферу и тропосферу.
Подобные преимущества позволяют, во-первых, значительно удешевить процесс формирования сети базовых станций, а во-вторых, повысить точность оценки текущих координат подвижных объектов независимо от характера их движения.















Список литературы:
- Интерфейсный контрольный документ ГЛОНАСС (5.1 редакция). — М.: РНИИ КП, 2008 г.
- ГЛОНАСС. Принципы построения и функционирования / Под ред. Перова А.И., Харисова В.Н.— М.: Радиотехника, 2010. — 800 с.
- Тихонов В. И., Харисов В. Н. Статистический анализ и синтез радиотехнических устройств и систем. – М.: Радио и связь, 1991. – 608 с.
- www.com[schema type=»book» name=»Повышение точности оценки навигационных параметров объекта на основе применения спутниковых и трекерных измерений» author=»Меерович Владимир Давидович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-06-16″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.12.2014_12(09)» ebook=»yes» ]