

С развитием систем дистанционного мониторинга воздушного и космического базирования получение оперативной и достоверной информации становится все более актуальной задачей. В стремлении разработчиков к снижению массогабаритных характеристик и повышению разрешающей способности радиолокационных систем одним из инновационных направлений их развития является комбинирование применения непрерывных частотно-модулированных (ЧМ) сигналов и принципов синтезирования апертуры антенн радиолокационных станций. Несмотря на технологический прорыв в области практического создания малогабаритных радиолокационных станций с синтезированием апертуры антенны (РСА), вопросы формирования непрерывных ЧМ сигналов и особенности их применения в РСА остаются весьма актуальными. Это объясняется, прежде всего, многообразием схем построения, характеристик и функционального назначения малогабаритных РСА, а также необходимостью получения радиолокационных изображений (РЛИ) высокого разрешения с учетом огромного количества основополагающих факторов.
Результаты анализа существующих малогабаритных РСА [1] показали, что в большинстве случаев когерентные радиолокаторы построены по гомодинной схеме с использованием непрерывных частотно-модулированных сигналов. При этом особый интерес представляют применяемые форма и характеристики используемых сигналов.
Как известно, радиолокационное обнаружение и определение координат объектов может осуществляться как при импульсном, так и при непрерывном излучении сигналов передатчика. Независимо от способа излучения радиоволн, в основе работы РСА лежит явление рассеяния излученных радиоволн при встрече их с удаленными объектами, при котором часть рассеянной энергии отражается в направлении радиолокатора. При непрерывном излучении радиоволн прямой и отраженный сигналы присутствуют на входе приемника одновременно и разделение их во времени невозможно. Поэтому в передатчиках таких станций частота сигнала модулируется и непрерывно изменяется, благодаря чему передаваемый и отраженный сигналы, приходящие к приемнику в различные моменты времени, могут различаться по частоте. Оценка расстояния сводится к измерению частотного интервала между излученным и отраженным от цели сигналами. Данное обстоятельство определяет основные особенности радиолокации при непрерывном излучении радиоволн.
Для РСА непрерывного излучения вопрос о когерентности режима их работы решается предельно просто. Излученный передатчиком зондирующий сигнал является гармоническим или модулированным. Отраженный от цели сигнал представляет собой его запаздывающее повторение, дополнительно модулированное за счет изменения характеристик цели и среды, в которой распространяются радиоволны. Поскольку и опорный сигнал в приемнике также является гармоническим или модулированным, то при взаимодействии его с отраженным сигналом всегда будут выполняться условия:

где Ег, Ес – амплитуды сигналов гетеродина (сигнала передатчика) и принятого колебания, Тн – интервал наблюдения, Тк – интервал когерентности, ωг, ωс – частоты сигналов гетеродина (сигнала передатчика) и принятого колебания, , μ – параметр, характеризующий медленность модуляции результирующего сигнала.
Следовательно, для радиолокаторов, работающих при непрерывном излучении гармонических или модулированных колебаний, сигнал гетеродина (роль которого может играть и сигнал передатчика) и отраженный от цели сигнал всегда почти когерентны. Поэтому, чаще всего [1], в приемнике РСА непрерывного излучения производится сравнение сигнала передатчика (гетеродина) и сигналов, отраженных от объектов, причем усилению и обработке обычно подвергается результат их перемножения в смесителе. Так как усилительный тракт за смесителем характеризуется частотной избирательностью, необходимо, чтобы выделяемый преобразованный сигнал был модулированным, т.е. имел достаточно узкий спектр. Поскольку он возникает в результате перемножения двух или нескольких сигналов, неизбежно на первый план здесь выдвигается вопрос о степени их когерентности.
Определение расстояния до цели при частотной модуляции передатчика сводится к измерению приращения частоты передатчика за время распространения сигнала до цели и обратно. При этом нетрудно установить связь между расстоянием до цели и соответствующим ему приращением частоты. Пусть частота передатчика fп изменяется по линейному закону (Рисунок 1, а). Изменение частоты отраженного от цели сигнала будет происходить с запаздыванием на время распространения сигнала [2]:


Рисунок 1. Закон непрерывного (а) и периодического (б) изменения частоты
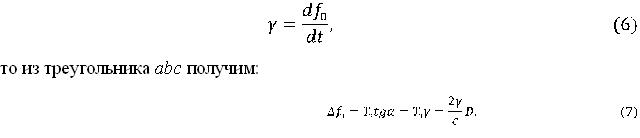
Из рисунка 1, а видно, что измерение приращения частоты передатчика за время Т3 сводится к вычислению разности частот излученного и отраженного сигналов. Если крутизну прямой, то есть скорость изменения частоты передатчика, обозначить через:
то из треугольника abc получим:
Следовательно, разность частот излученного и отраженного сигналов Δfп линейно пропорциональна расстоянию до цели D и однозначно его определяет. Поскольку непрерывное изменение частоты передатчика по непрерывному закону (Рисунок 1, а) на практике осуществить нельзя, в радиолокации приходится применять различные формы периодической модуляции его частоты относительно некоторого исходного значения fп0 (Рисунок 1, б), хотя это приводит к появлению ряда паразитных эффектов.
Одним из наиболее простых законов частотной модуляции передатчика является симметричный пилообразный закон. Для вывода основных соотношений необходимо ввести ограничения:

где Тз – время распространения сигнала до объекта и обратно, Тм – период модуляции. Рассматривается два случая:
1) Цель неподвижна (Рисунок 2). В этом случае, как видно из рисунка 2, б, в течение всего времени «дальностная» частота fD сохраняет неизменное значение за исключением коротких участков 1—1, 2—2, 3—3. Восходящая часть каждого периода модуляции (1—2, 3—4 и т.д.) воспроизводит отрезки прямой на рисунке 1, а, для которой связь fD с дальностью D из треугольника abc определяется соотношением (7). На нисходящей ветви частоты fп и fс меняются местами, но ввиду симметричности закона модуляции абсолютная величина частотного интервала между ними определяется тем же соотношением (7).
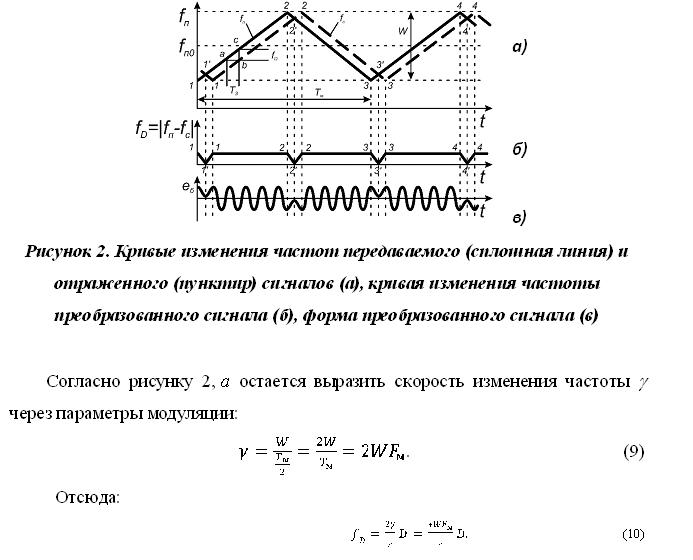

Из выражения (10) следует, что дальномерное приращение частоты fD не зависит от величины несущей частоты передатчика fп, но определяется скоростью ее изменения g=2WFм. Таким образом, дальномерные приращения частоты, подобные допплеровским, обычно лежат в диапазоне звуковых и ультразвуковых частот.
Как видно из рисунков 2, а и б, вблизи точек 1‘, 2‘, З‘ и т. д., где кривые fп и fс пересекаются и разность их fD проходит через ноль, фаза преобразованного сигнала изменяется на 180°, как показано на рисунке 2, в. Эти участки кривой модуляции называют зонами обращения. При этом следует обратить внимание на то обстоятельство, что зоны обращения следуют одна за другой строго периодично с интервалами . Это обстоятельство при радиолокации неподвижной цели является источником так называемой постоянной ошибки.
2) Цель подвижна. В этом случае, помимо дальномерного (fD), отраженный сигнал претерпевает допплеровское приращение частоты fд, определяемое выражением:


Однако в реальных РСА W<<fп, и можно приближенно считать fп~fп0, полагая, что fд при заданной скорости Vr постоянна. При этих упрощающих предположениях можно графически рассмотреть два характерных случая, для определенности полагая, что цель движется к радиолокатору (fд>0).
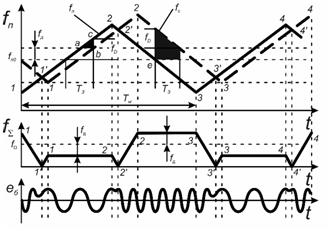
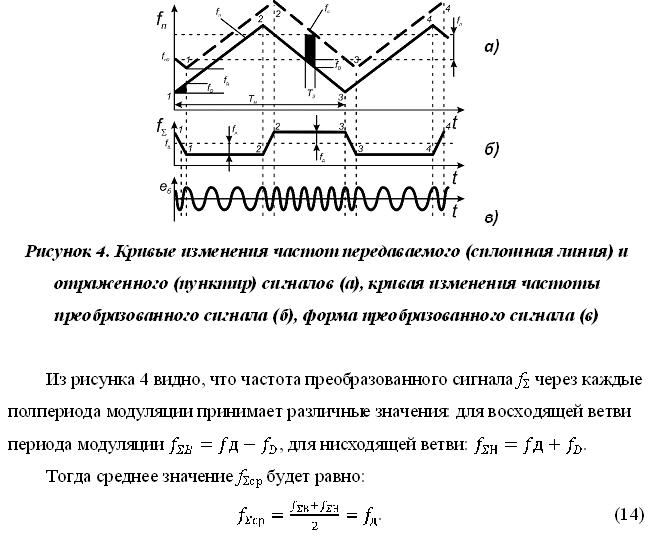
а) Цель движется с малой скоростью (fд< fD). Из рисунка 3 видно, что частота преобразованного сигнала fΣ через каждые полпериода модуляции принимает различные значения: для восходящей ветви периода модуляции , для нисходящей ветви .
 |
а) |
|
б) |
|
|
в) |

Рисунок 3. Кривые изменения частот передаваемого (сплошная линия) и отраженного (пунктир) сигналов (а), кривая изменения частоты преобразованного сигнала (б), форма преобразованного сигнала (в)
Если не учитывать короткие зоны обращения (1—1, 2—2 и т.д.), среднее значение fΣср будет равно:
![]()

Таким образом, при малой скорости цели, когда fд< fD, частота преобразованного сигнала через каждые полпериода модуляции изменяется, причем среднее значение (постоянная составляющая) этой частоты равно fD, то есть линейно пропорционально расстоянию D, а размах ее изменения (переменная составляющая) равен 2fд, то есть линейно пропорционален радиальной скорости цели Vr. Разделив в приемном устройстве постоянную и переменную составляющие закона изменения fΣ, получают возможность раздельного измерения дальности и радиальной скорости цели. При этом фаза преобразованного сигнала в зонах обращения изменяется на 180о.
б) Цель движется с большой скоростью (fд>fD).

Вследствие большого значения fд, при котором кривая fс во все моменты времени лежит выше кривой fп и нигде ее не пересекает, частота преобразованного сигнала нигде не проходит через ноль и поэтому преобразованный сигнал не претерпевает обращения фазы. При большой скорости цели, когда fд > fD, частота преобразованного сигнала через каждые полпериода модуляции изменяется, причем среднее значение (постоянная составляющая) этой частоты равно fд, то есть линейно пропорционально радиальной скорости цели Vr. а размах ее изменения (переменная составляющая) равен 2fD. то есть линейно пропорционален расстоянию до цели.
Таким образом, и в этом случае имеется возможность, разделив постоянную и переменную составляющие fΣ, измерить раздельно дальность D и радиальную скорость Vr. Однако, как нетрудно заметить, в двух рассмотренных случаях D и Vr «меняются местами»:
— при fд < fD : fΣср =fD и |fΣ — fΣср|=fд,
— при fд > fD, наоборот, fΣср =fд и |fΣ — fΣср|=fD.
Следовательно, для раздельного однозначного определения дальности и радиальной скорости с помощью РСА необходимо заранее знать, что больше: fD или fд. Иначе при переходе, например, от малой (fд < fD) к большой (fд > fD) скорости на измеритель скорости начнут поступать сигналы, характеризующие дальность, а на дальномер – сигналы, характеризующие скорость – получится ложный отсчет. Граничное значение скорости, удовлетворяющее равенству fд кр = fD, при котором имеет место указанное «опрокидывание» показаний дальномера и измерителя скорости, получило название критической скорости Vr кp. Наличие критической скорости является одним из недостатков простых схем радиолокаторов. Однако, в ряде случаев подбором параметров станции можно вывести критическую скорость за пределы рабочего диапазона измеряемых скоростей и этим устранить неоднозначность отсчета. Действительно, чувствительность по дальности kD, то есть приращение частоты fD при изменении расстояния на 1 м, из (10) равна:

то есть зависит от fп и практически не зависит от g.
Это позволяет при заданных пределах измерения D и Vr, варьируя fп и g, подобрать такие чувствительности kD и kV, при которых будет выполняться условие fд макс< fд кр либо fд мин> fд кр и однозначность отсчета будет обеспечена.
Таким образом, результаты рассмотрения особенностей непрерывных ЧМ сигналов показывают, что их применение в радиолокации дает ряд преимуществ: простота схемы формирования и конструкции РСА, отсутствие ближней «мертвой зоны», характерной для импульсных радиолокаторов, возможность работы при весьма малой действующей полосе пропускания, определяемой в основном шириной спектра допплеровских частот fд, возможность селекции целей по скорости, а также некритичность к медленным уходам частоты передатчика.
Список литературы
- Обзор малогабаритных радиолокационных станций с синтезированием апертуры антенны и непрерывным излучением для беспилотного летательного аппарата ближнего действия / В.А. Кузнецов, М.М. Баранов // Академические Жуковские чтения: сборник докладов Всероссийской научно-практической конференции. Воронеж: ВУНЦ ВВС «ВВА», 2014. – С. 148-153.
- Школьный Л.А. Радиолокационные системы воздушной разведки, дешифрирование радиолокационных изображений: учебник. М.: ВВИА, 2008. – 531 с.[schema type=»book» name=»ОСОБЕННОСТИ НЕПРЕРЫВНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ МАЛОГАБАРИТНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ» description=»В статье рассматриваются особенности непрерывных частотно-модулированных сигналов, используемых в радиолокационных станциях с синтезированием апертуры антенны. Представлены соотношения, описывающие основные зависимости для режимов картографировании подстилающей поверхности и селекции движущихся целей.» author=»Кузнецов Виктор Андреевич, Стряпчев Эдуард Николаевич, Бледных Иван Анатольевич, Арестов Евгений Юрьевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-04-20″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 28.03.2015_03(12)» ebook=»yes» ]