

До сих пор, построение поверхностей созданных траекторией объекта – задача, которая рассматривалась с точки зрения физики объекта. Предложенный в статье подход позволяет решить данную задачу с точки зрения математического моделирования.
Изменение угла или координаты является функциональной частью объекта и отражено в выбранном примере – рисунок 1.
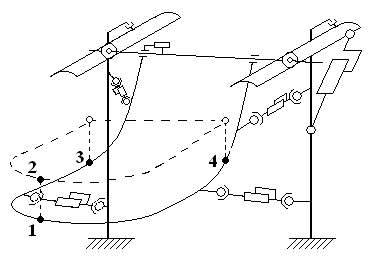

Рисунок 1. Схематическое изображение примера объекта исследования.
На рисунке 1 указаны базисные точки: основные и вспомогательные. Также отображены движущие элементы. Точка №1 является опорной. На рисунке 2 поясняется, какие граничные положения объект возможны при движении.
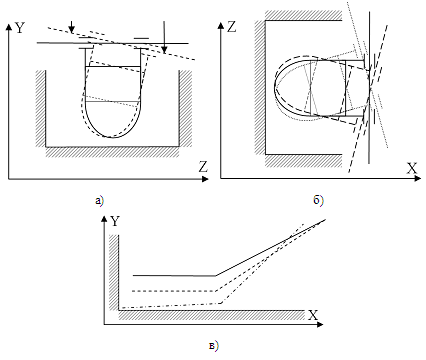

Рисунок 2 – Исходные положения объекта и в максимальном сдвиге:
а — вид спереди, б — вид сверху, в — вид сбоку.
На рисунке 2 сплошными линиями показаны исходные положения объекта, а штрихпунктирные лини отображают максимально удаленное положение при движении.
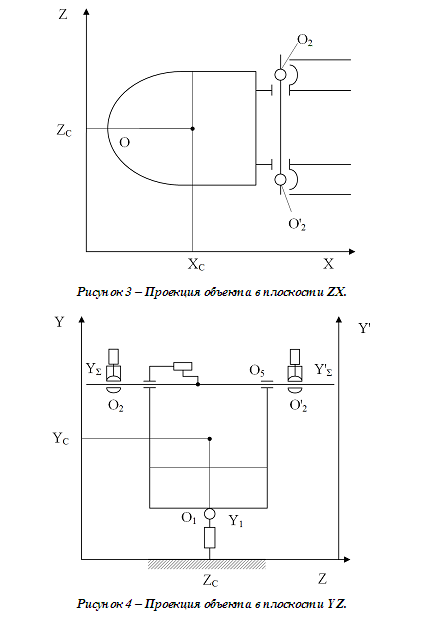
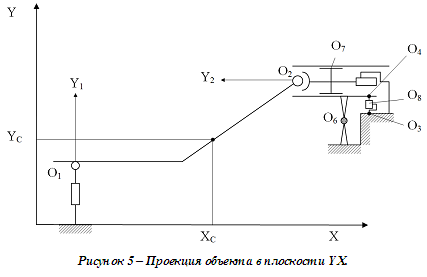
На рисунках 3-5 показаны проекции объекта по плоскостям с обозначением подвижных узлов (О).


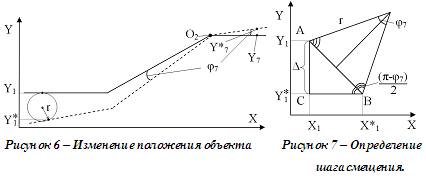

На рисунке 6: О2 – шарнир; координата точки крепления движущего элемента 7 до и после движения, а φ7 – угол поворота относительна О2.
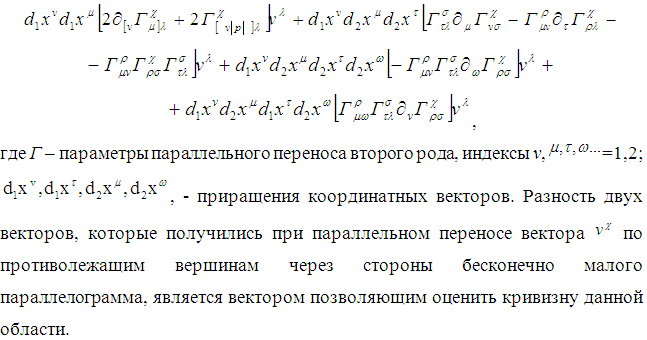
Так, изменение положения для вида сбоку отображено на рисунке 3 и определяется, как Для получения численного значения используется взаимосвязь движущих элементов – рисунок 7.
Из рисунка 1.7 получим:
![]()

Угол φ7 определяется изменением положения движущего элемента 7 и известен. Угол возможно определить из вычислительного эксперимента, который будет описан далее. Так как возможных комбинаций положения объекта в пространстве значительное количество (зависит от числа выбранных движущих элементов), то для описания траектории понадобится система уравнений. Число уравнений пропорционально количеству комбинаций. Тогда получится вектор функций, описывающих траекторию движения объекта, высокой размерности.
Корректировка математической модели осуществляется путём обучения сети посредством уникального алгоритма, который основан на обучающей выборке и относится к классу стохастических методов [1].
Подход, использующийся для решения задач определения формообразования поверхности по известной формообразующей функции, в работе Белкина Е.А. носит название модульно-геометрический подход. Суть данного подхода сводится к аппроксимации выбранного фрагмента поверхности соприкасающимся параболоидом. Для того чтобы оценить кривизну выбранного фрагмента используется тензор кривизны (тензор Римана-Кристоффеля). Запись в виде аналитического выражения можно определить с помощью разложения в ряд Тейлора, что позволит получить параболоид как геометрический образ второго порядка, который соприкасается с локализованной областью поверхности. Модификацией данного подхода служит использование ряда Фурье как формообразующую составляющую.
Угол, осуществляемого поворот вектора, который параллельно себе переносится по замкнутому контуру поверхности, которая включает фигуру, описываемую рядом Фурье, позволяет оценить кривизну данного фрагмента поверхности.
Такой показатель кривизны выбранной области в качестве фрагмента поверхности зависит от координат следующего вектора

![]()

При построении требуемой поверхности необходимо ограничиться аппроксимацией локальной зоны соприкасающейся поверхности «натянутой» на функцию аппроксимации, так как поверхности в точке соприкосновения обладает кривизной, которая равна кривизне выбранной поверхности для аппроксимации.
Прибегая к гладкой «сшивке» модулей аппроксимаций поверхности, которая определяется дискретно можно получить аналитическое представление последней. Модули являются соприкасающимися поверхностями конкретной классификации.
Определение аналитического выражения для соприкасающейся поверхности осуществляется, используя главные кривизны поверхности. Полная кривизна соприкасающейся поверхности также как и средняя выражаются уравнениями:


где К — полная (гауссова), Н – средняя, h1, h2 – главные кривизны поверхности, g11, g12, g22 – элементы метрического тензора. Для представленной системы уравнений используется уравнение Гаусса, а также тензор Римана-Кристоффеля [1].
Список литературы:
- Галкин И.Ю. Модификация модульно-геометрического подхода для объекта, движущегося по траектории. / И.Ю. Галкин, А.М. Литвиненко // Новые технологии в научных исследованиях, проектировании, управлении, производстве. Труды Всероссийской конференции: ФГБОУ ВПО ВГТУ, 2015 г. – С. 159-160[schema type=»book» name=»ОБРАЗУЮЩАЯ ТРАЕКТОРИЯ ПОВЕРХНОСТИ, ПОСТРОЕННАЯ С ПРИМЕНЕНИЕМ УНИКАЛЬНОГО АЛГОРИТМА.» description=»В статье рассматривается поверхностное моделирование для решения математических задач. В основу положено нейросетевое моделирование, включающее оптимизационную задачу. Для построения поверхности объекта, движущегося по траектории, при пересечении с другим применяется модификация модульно-геометрического подхода.» author=»Галкин Игорь Юрьевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2016-12-27″ edition=»euroasia-science.ru_26-27.02.2016_2(23)» ebook=»yes» ]