

Целью данной работы является попытка подойти к задаче обоснования оптимальной схемы маневрирования шарнирно-сочлененного транспортно-технологического шасси с позиции биомеханической концепции. При этом биомеханическим прототипом выбрано земноводное пресмыкающееся – змея (далее уж). Данный выбор обоснован тем, что эволюция этих животных проходила на протяжении десятков миллионов лет. Это привело к тому, что ужи обладают уникальными свойствами при движении, как в жидкой среде, так и на суше [7,8]: практически бесшумное перемещение; отсутствие следа даже на рыхлой поверхности; уникальная маневренность и др.Целесообразно заключение: время оптимизировало способы движения и маневрирования ужей [2,4,6].
При этом способ движения (по суше),как показывает наш анализ, заключается в волнообразном изгибании тела ужа, с одной стороны, и шагающем движении ребер скелета, с другой. В итоге наблюдаются два положительных эффекта:
— в зоне контакта тела ужа и опорной поверхности при движении имеет место быть мало энергоемкое трение – качения;
— в процессе волновых изгибов тела смежные участки его одновременно совершают угловые перемещения друг относительно друга пропорционально внешнему сопротивлению со стороны опорной поверхности.
На рисунке 1 условно изображены два смыкающихся участка тела ужа в процессе волнового изгиба за счет внутренних фрагментов мышц А1В1 и А2В2.
При этом равновесие рассматриваемой системы (рисунок1) в условиях минимизации энергозатрат на процесс изгиба тела животного на углы φ1 и φ2возможно при условиях равенства мощностей Р1V1 и P2V2 , соответственно для условных групп мышц А1B1 и А2В2.
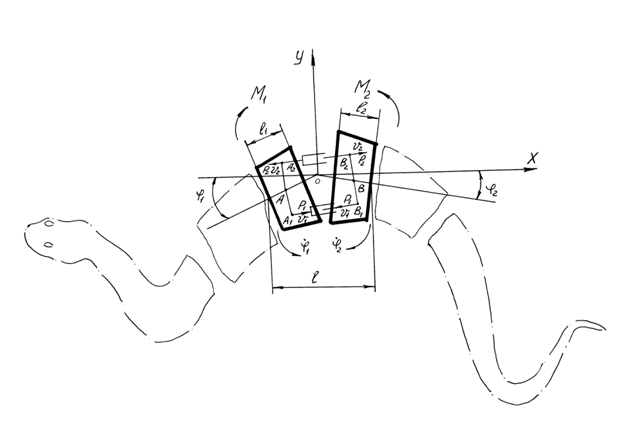

Рисунок1. Биомеханический прототип концепции управления шарнирно-сочлененного транспортно-технологического шасси
В условиях маневрирования в ходе выполнения технологического процесса(например, под пологом древостоя для лесной машины), при постоянном объезде препятствий движению, оператор вынужден практически не переставая воздействовать на рулевое колесо (или джойстики) для изменения направления курса агрегата (рисунок 2). То есть шарнирно-сочлененное шасси будет максимально возможное время перемещаться с одновременным угловым движением передней и задней секций друг относительно друга. Это процесс поворота является неустановившимся, то есть постоянно меняющимся по направлению [5]. Отсюда следует актуальность уменьшения энергозатрат на осуществление указанного режима маневрирования рассматриваемой транспортной системы. Тем более, что энергетический баланс поворота машины напрямую определяет интенсивность силового взаимодействия ходовой системы с почвенным покровом, а это важнейший фактор экологической совместимости агрегата и среды.
Предложенные ниже теоретические выкладки базируются на следующих предпосылках и упрощениях реального поворота колесного шарнирно-сочлененного шасси, например, лесной машины:рассматривается равномерный режим складывания полурам;вертикальная нагрузка на оси секций и их колеса неизменна;колеса секции, совершающей угловое перемещение относительно другой полурамы при повороте, осуществляют одинаковую работу по преодолению момента сопротивления складыванию;поверхность движения машины горизонтальна и однородна;боковой увод шин не учитывается, а сами колеса рассматриваются абсолютно жесткими;центры тяжести секций при повороте расположены над их осями;рассматривается шасси 4х4.
Имеется следующая постановка задачи: заданы — шарнирно-сочлененная транспортная система (например, лесная) в некотором технологическом процессе, внешние факторы поворота; требуется – найти такие условия функционирования системы управления поворотом, при которыхминимизируется энергоемкость процесса складывания полурам агрегата, а значит и маневрирования в целом.
С целью локализации рассмотрения именно текущего «излома» секций машины друг относительно друга, правомерно считать, что: энергозатраты связанные с движением по траектории в неподвижной (внешней) системе координат для всех возможных процессов складывания секций аналогичны и исключены из рассмотрения (например, работа на преодоление внешних сил сопротивления движению и сил инерции от поступательного перемещения по кривой, кинетическая энергия всей системы в этом движении); энергозатраты рассматриваются в системе координат неподвижно связанной с осью вертикального шарнира шасси .
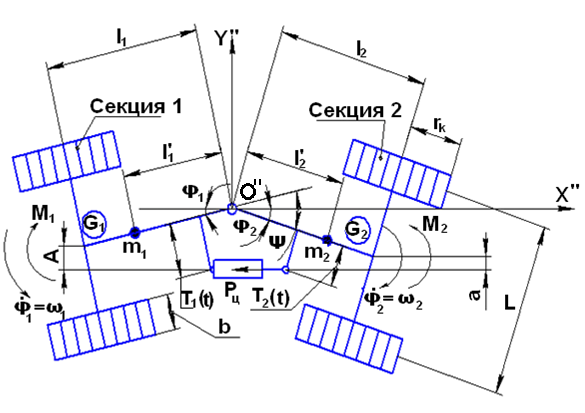

Рисунок 2. Расчетная схема складывания полурам шасси транспортно-технологической машины
Изложенные аналитические построения иллюстрируются рисунком 2.
Уравнение энергозатрат на процесс «излома» секций шасси представим в виде суммы
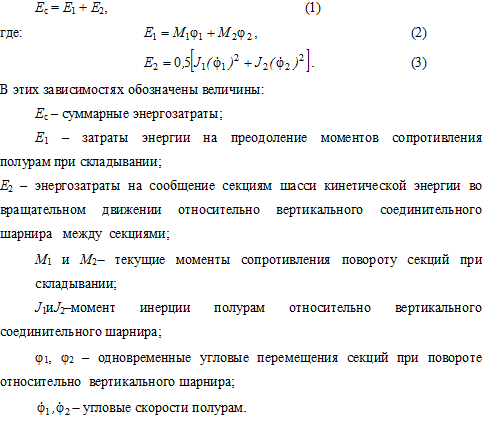





оно приемлемо для практической реализации в рамках задачи (5).
Технически данный алгоритм оптимального управления возможно реализовать путем соответствующей цифровой компьютерной системы, обеспечивающей в зависимости от условий маневрирования соответствующее адаптирование величин параметров системы Т1(t), Т2(t) и l2 (рисунок 2).
Правомерно предполагать, что практическая реализация изложенных теоретических предпосылок может повысить энергетическую эффективность маневрирования машины, например, под пологом леса, улучшить эргономические условия для оператора и экологическую совместимость технического средства и окружающей среды.
Изложенные теоретические предпосылки легли в основу технического решения, признанного изобретением (“Трелевочно – транспортная машина”, по заявке 4942046/11, МКИ5 В60Р3/40).
Вывод
Теоретически установлено, что возможно оптимальное управление процессом складывания полурам при повороте шарнирно-сочлененного транспортного – технологического шасси 4х4. Энергозатраты при этом в среднем (оценочно) на 68% меньше по — сравнению с известными исполнительными устройствами осуществления аналогичного процесса.
Список литературы:
- 1.Биомоделирование: Сборник. М.: РАН,1993. – 170 с.
- 2.Глазер Р. Очерк основ биомеханики /пер. с англ. / Р.Глазер. М.;Мир, 1988. – 128 с.
- 3.Оптимальное управление: Сборник. М.: Знание, 1978. — 143 с.
- 4.Розен Р. Принцип оптимальности в биологии/пер. с англ. /Р.Розен. М.: Мир, 1969. – 215 с.
- 5.Фаробин Я.Е. Теория поворота транспортных машин / Я.Е.Фаробин. М.: Машиностроение, 1970. — 176 с.
- 6.Ханин М.А.Экстремальные принципы в биологии и физиологии /М.А.Ханин, Н.Л.Дорфман, И.Б.Бухаров и др.М.: Наука, 1978. – 236 с.
- 7.Чегодаев А.Е. Змеи, как они есть / А.Е.Чегодаев. М.: Знание, 1990. – 62 с.
- 8.Чегодаев А.Е. Удивительный мир рептилий /А.Е.Чегодаев. СПБ.; Гидрометеоиздат, 1992. – 174 с.[schema type=»book» name=»МИНИМИЗАЦИЯ ЭНЕРГОЕМКОСТИ МАНЕВРИРОВАНИЯ ШАРНИРНО-СОЧЛЕНЕННОГО ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОГО ШАССИ В РАМКАХ БИОМЕХАНИЧЕСКОЙ КОНЦЕПЦИИ» author=»Мясищев Дмитрий Геннадьевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-03-29″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_30.04.2015_04(13)» ebook=»yes» ]