

- Введение
Автомобильные самонагружающиеся краны-манипуляторы представляют собой шарнирно-сочлененные стрелы, приводимые в движение гидравлическими устройствами. Обычно они монтируются позади кабины или в конце грузовой платформы транспортного средства. Эти конструкции снабжаются разнообразным грузоподъемным оборудованием и предназначены для работы в разных отраслях экономики – в торговле, в строительстве, в металлургии и в лесной промышленности. Автомобильные краны-манипуляторы имеют широкий диапазон технических характеристик и для некоторых моделей грузовой момент может достигать 150 [tm], а вылет — до 30 [m]. Это предполагает значительные инерционные нагрузки на металлическую конструкцию и на привод, порождаемые грузом и элементами стрел при их движении. Исследование динамических процессов, наблюдающихся при работе манипулятора, сосредоточено в ряд направлении, основные из которых: 1) Определение статических и динамических сил, действующих на элементы стрел, прежде всего для оптимизации их конструкции, а также определение коэффициента динамичности для проведения расчета напряженно-деформированного состояния элементов стрел и расчета параметров гидропривода; 2) Определение динамической устойчивости базовой машины против опрокидывания; 3) Исследование точности позиционирования, особенно при гибкой подвеске груза.
В большинстве случаев, возможно регулировать динамические процессы прежде всего уменьшением скорости движения, что ведет с одной стороны к увеличению времени цикла и уменьшению производительности, а с другой стороны – к уменьшению энергетической эффективности, особенно для гидропривода.
Автомобильные краны-манипуляторы обычно конструируются как открытые кинематические цепи, состоящие из звеньев, связанных между собой вращающимися или скользящими парами, при том число звеньев достигает до 4-5. Возможное относительное движение между звеньями позволяет как пространственное движение груза по определенной траектории, так и значительную свободу при его позиционировании. Вот почему, для исследования динамических процессов, механическую систему нужно представить как многомассовую систему.
Исследование динамических процессов в механизме вращения крана представляет интерес прежде всего для проектировщика машины, так как механизм служит для перемещения больших масс на больших расстояниях от оси вращения (до нескольких десятков метров). В этом случае следует ожидать наличие значительных статических и динамических нагрузок, порожденных силами тяжести и инерцией звеньев механизма и груза. Дополнительно, свободно висящий на конце стрелы груз имеет поведение раскачивающегося маятника, что в значительной степени увеличивает инерционную нагрузку на механическую систему и отрицательно сказывается на проведение технологических операции.
Динамика подобных кранов рассматривалась в множестве публикации. Ряд публикации [4,5,6,7], как и некоторые классические учебники [11,12] рассматривают динамику вращающихся е кранов с точки зрения определения законов движения звеньев и динамических усилии в эластичных связях. В других работах [1,8,9] рассматривается возможность создания стратегии и алгоритмов управления двигательных или тормозных моментов так, чтобы уменьшит раскачивание груза и инерционные нагрузки. Обзор литературы показывает, что в основном рассматривается электропривод, а дифференциальные модели механизмов обычно линеаризуются. Одна попытка связать динамические процессы в гидроприводе манипулятора сделана в [10], но гидравлическая система рассмотрена при большой степени идеализации.
Имея ввиду выполненный обзор литературы, цел настоящей работы формулируется так: создать динамическую модель механизма вращения автомобильного гидравлического крана-манипулятора и исследовать влияние раскачивания груза на характеристики механической и гидравлической системы. Так как движение звеньев управляется с помощью гидравлического распределителя с ручным или электрическим управлением, то модель механической системы нужно совместит с моделью гидравлической системы. Чтобы учесть возможность наличия больших углов раскачивания груза, полученная дифференциальная модель системы не линеаризуется.
- Динамическая модель крана
На рис.1 показана геометрическая модель гидравлического крана, состоящая из трех шарнирно-сочленённых звеньев – опорно-поворотной колонны, вращающейся вокруг вертикальной оси, и двух звеньев стрелы, вращающихся вокруг горизонтальных осей. Груз (поз.3) подвешен свободно к концу второго звена стрелы и имеет две степени свободы – вращение вокруг двух взаимно перпендикулярных осей — Z2 и Z3 (сферический маятник). Это осуществлено с помощью введения дополнительного звена (поз.2), вращающегося вокруг оси Z2 и имеющего массу 0. Взаимное расположение звеньев (углы между ними) определяет текущий вылет крана, который оказывает сильное влияние на динамику механизма вращения. Для целей настоящего исследования, кран рассматривается как кинематическая цепь с тремя степенями свободы – одна степен свободы имеется у совместно вращающихся опорно-поворотной колонны и двух звеньев стрелы (поз.1), а две степени свободы – у груза, представленного как сферический маятник. Для такой модели решается прямая задача динамики – при известном двигательном моменте, проложенном к опорно-поворотной колонне, определить как закон движения системы по всем степеням свободы, так и характеристики гидравлической системы.
Для получения дифференциальной модели механической системы используются уравнения Лагранжа второго рода, записанные в виде:


В уравнении (1) использованы следующие обозначения: K — полная кинетическая энергия системы; U – потенциальная энергия системы; τi – обобщённые силы; θi — независимые обобщённые координаты. Для рассматриваемой системы обобщённые координаты – это углы относительного поворота звеньев — θ1 – угол поворота колонны и стрелы, θ2 и θ3 – углы поворота груза.
Чтобы определит скорости движении звеньев, к каждому звену по правилам Денавита-Хартенберга [3] присоединена локальная координатная система – рис.1. Параметры трансформации, выражающих векторы в координатной системе с более высоким номером в координатной системе с более низким номером показаны в табл.1. Так, рассматривание пространственного движения звеньев замещается рассматриванием относительного движения соответствующих координатных систем.
табл.1 Параметры Денавита-Хартенберга
| № звена | αi | ai | di |
θi |
| 1 | 0 | 0 | d1 | θ1 |
| 2 | π/2 | a2 | 0 | θ2 |
| 3 | -π/2 | 0 | 0 | θ3 |
Здесь числовые значения параметров d1 и a2 определяют значение текущего вылета стрелы, рассматриваемой как твердое тело. Очевидно, что изменение этих параметров приводит к изменению массово-инерционного тензора первого звена динамической модели (колонна и два звена стрелы). Имея ввиду, что в предложенной модели возможен поворот звеньев только вокруг осей Zi (т.е. угловая скорость в шарнире i задается с помощью вектора ![]()
![]()



где введены следующие обозначения: wi — вектор угловой скорости i-той координатной системы; vi – вектор скорости начала координатной системы i; vCi – вектор скорости центра тяжести звена i; PCi, Pi+1 – векторы центра тяжести звена i и начала системы i+1 соответственно. Все описанные величины выражены в собственной координатной системе i.
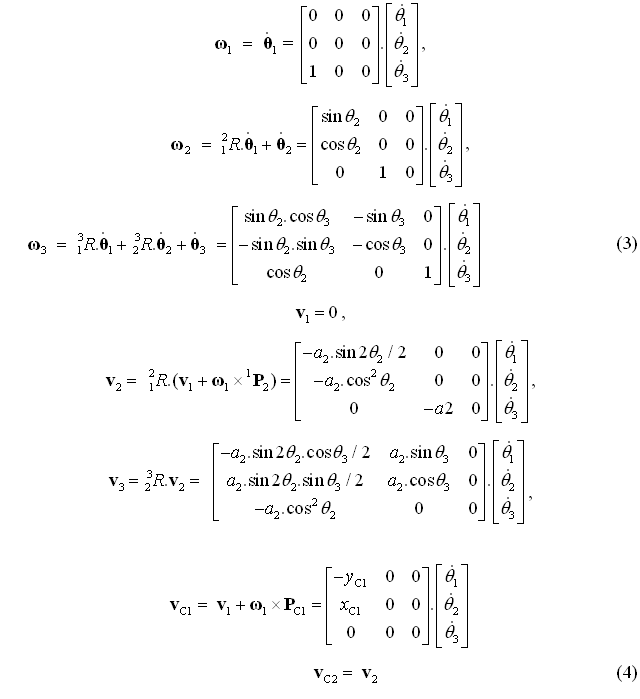
Согласно зависимостей (2), угловые и линейные скорости звеньев как функции обобщённых скоростей в шарнирах определяются так:

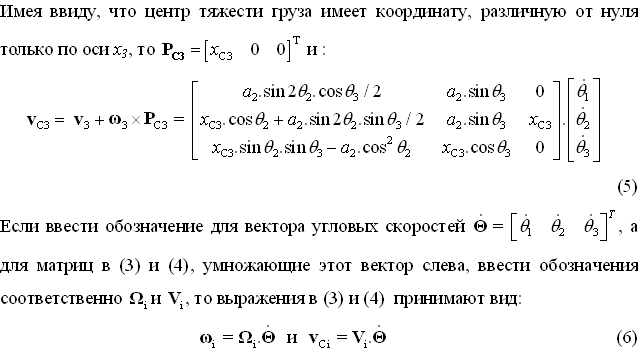
Имея ввиду, что центр тяжести груза имеет координату, различную от нуля только по оси x3, то и :

Полная кинетическая энергия системы вычисляется как сумма кинетических энергии вращательного и поступательного движения всех тел. Используя обозначения в формулах (2) и (6), то полная кинетическая энергия вычисляется как [3]:
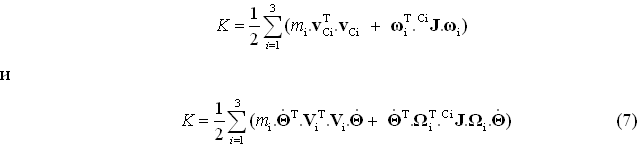

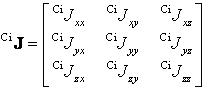
Здесь ![]()


Полная потенциальная энергия механической системы вычисляется как сумма потенциальных энергии звеньев. Для точкой отсчета при определении потенциальной энергии можно принят произвольную точку на оси Z0, в конкретном случае это точка О0:


К первому звену (колонна с двумя звеньями стрелы) приложен двигательный момент, выражающийся вектором ![]()

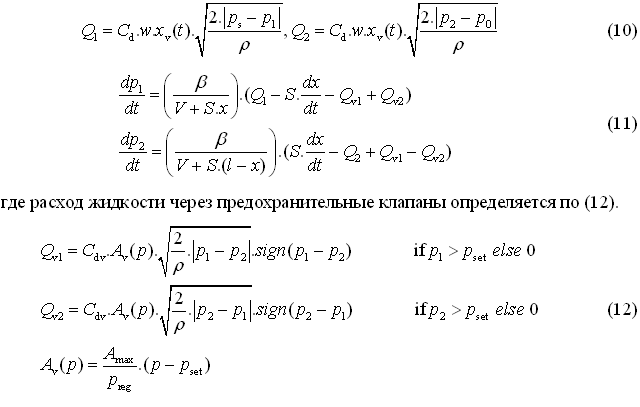

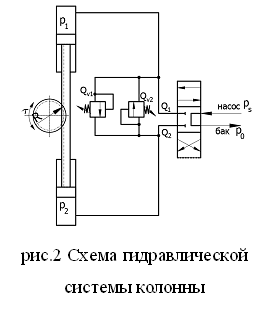
В формулах (10)-(12) введены следующие обозначения: Q1, Q2 — расходы жидкости через гидравлические распределители — рис. 2; Qv1, Qv2 – расходы жидкости через предохранительные клапаны; Cd, Cdv — коэффициенты расхода; w — градиент на площади проходного сечения распределителя; — кусочно-линейная аппроксимация закона перемещения золотника распределителя; ρ – плотность гидравлической жидкости; b — объёмный модуль упругости жидкости; p0 – давление в сливной линии; p1, p2 — давления в полостях сдвоенного гидравлического цилиндра; V – постоянные объемы гидравлической жидкости в гидроцилиндрах; x – позиция поршня гидроцилиндра; S — площадь поршня; l — ход гидроцилиндра; Av(p) — переменная площадь проходного сечения предохранительного клапана; Amax – максимальная площадь проходного сечения предохранительного клапана; pset, — давление, при котором срабатывает предохранительный клапан; preg — давление при максимальном открытии клапана.
Имея значения давлении p1 и p2, вектор содержащий двигательный момент имеет следующий вид:
(9)
где ![]()

- Числовой пример
После подстановки выражении для кинетической (7) и потенциальной (8) энергии в (1) и выполнения операции дифференцирования, получается система из трех обыкновенных дифференциальных уравнении второго порядка, которые совместно с двумя уравнениями первого порядка (11) интегрируются численным методом. При этом допускаются следующие предположения: 1) трение в шарнирах пренебрегается; 2) изменение вылета крана осуществляется заданием разных числовых значениях параметров d1 и а2 – при минимальном вылете d1= 0.4705 [m] и a2=0.525 [m], а при максимальном — d1=1,318 [m] и a2=3.198 [m]; 3) масса, центр тяжести и тензоры инерции звеньев определены с помощью трехмерной CAD модели.
Так же, приняты следующие значения параметров крана и гидропривода — масса груза — 270 [kg], длина подвески — 1.1 [m], время закрытия и открытия распределителя – 0.05 [s], давление ps — 6 [MPa], давление срабатывания предохранительного клапана — 7 [MPa], плотность жидкости — 855 [kg/m3], объёмный модуль упругости жидкости – 1.6.109 [Pa], первоначальные значения давления в полостях гидроцилиндра — 4 [MPa], первоначальные значения отклонения груза — θ2=0 и θ3=0, т.е. висит в вертикальном положении.
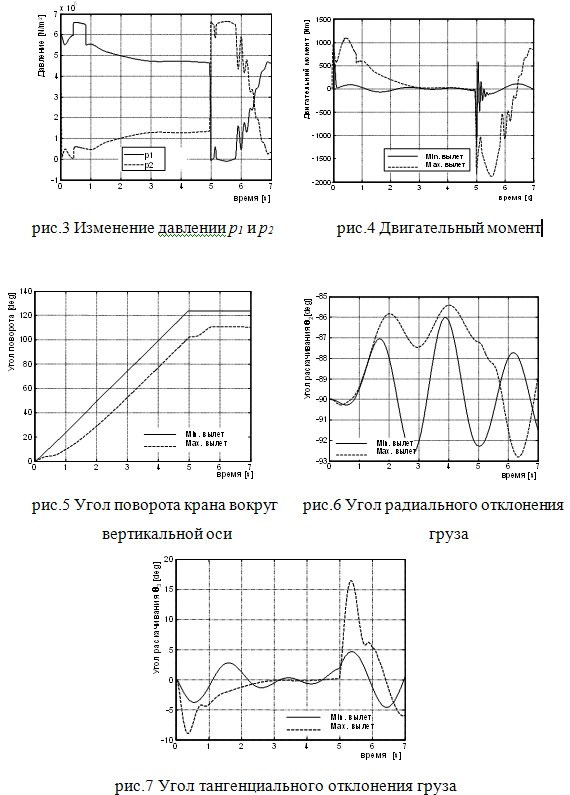
Графики изменения определённых характеристик системы в функцию времени показаны на рис. 3-7.

{kind=link}
{kind=link}
- Дискуссия и заключения
Как показывают результаты численного эксперимента, двигательный момент (сила в гидроцилиндре) зависит в основном от значении давления и расхода, а инерционно –массовые характеристики механической системы имеют относительно небольшое влияние при повороте. Это видно из результатов на рис. 5, где шестикратное изменение инерционного момента крана относительно оси поворота (для минимального и максимального вылета) ведет только к изменению в ~10о в угле поворота за рассматриваемый период времени. Можно также отметит, что изменение инерционного момента ведет к изменению ускорения, которое, как и следовало ожидать, меньше при максимальном вылете. На рис.4 показано изменение двигательного момента при минимальном и максимальном вылете. Во втором случае постоянное давление на входе ведет к увеличению силы в гидроцилиндре, которая необходима для преодоления большей инерционной нагрузки.
Как можно ожидать, внезапное открытие или закрытие гидравлического распределителя ведет к увеличению давления в системе, которое может достигать опасных значении если его не ограничит. Рис.3 показывает изменение давления в двух полостях сдвоенного гидроцилиндра при максимальном вылете. На этом же рисунке видно, что раскачивающийся груз дополнительно влияет на давление в гидравлической системе – меньше при установившемся режиме движение и значительно больше после остановки поворота (между 5s. и 7s.). Это изменение давления надо учитывать при расчетах.
Внезапное увеличение давления после закрытия распределителя ведет к срабатыванию предохранительного клапана и перетеканию гидравлической жидкости из одной полости гидроцилиндра в другую, при этом ограничивается давление до предварительно заданного значения. Это ведет к нарушению точной остановки крана при повороте. Этот эффект виден ясно на рис. 5, где после остановки на пятой секунде, угол поворота θ1 продолжает расти (для максимального вылета).
В результате наличия переходных процессов системе, груз раскачивается в двух взаимно перпендикулярных направлениях. Изменение углов отклонения от вертикального положения θ2 и θ3 показаны соответственно на рис.6 и рис.7. Как видно, инерционные характеристики системы слабо влияют на угол раскачивания груза. Угол раскачивания в плоскости звеньев, вызванное центробежными и кориолисовыми ускорениями относительно невелико – 6о-8о. Угол раскачивания в перпендикулярной плоскости бистро уменьшается после начального ускорения и сильно увеличивается после остановки крана. Значение этого угла также зависит от длины подвески груза. Из за больших значении этого угла (около 15о), раскачивание груза является источником дополнительных инерционных нагрузок в металлической конструкции и гидроприводе, которые нужно учитывать при расчетах. Для рассматриваемой конструкции можно заключит, что коэффициент динамичности имеет значения 1.2-1.3.
Полученные результаты показывают, что предложенная методика может быт с успехом использована для решения такого вида динамических задач. Дальнейшие исследования можно сосредоточит в направление определения такого закона изменения двигательного момента, который бы обеспечил уменьшение раскачивания груза и увеличения точности его позиционирования при повороте.
Список литературы:
- Abdel-Rahman, E.M., Nayfeh, A.H., Masoud, Z.N. Dynamics and Control of Cranes: A Review. Journal of Vibration and Control, 2003, 9, 863-908.
- Akers , Gassman М.,Smith R., Hydraulic power systems analysis, Taylor & Francis Group, NY, 2006, ISBN-13: 978-0-8247-9956-4
- Craig, J. Introduction to Robotics: Mechanics and Control, 3rd Edition, Pearson Education, 2005
- Safarzadeh D, Sulaiman S., Faieza Abdul Aziz, Desa Bin Ahmad. An Approach to Determine Effect of Crane Hook on Payload Sway, International Journal of Mechanics and Applications, 12/2012; 1(1):30-38. DOI: 10.5923/j mechanics 20110101.04
- Feng, J., Yoo, SC. Dynamic Analysis of Tower Cranes. Journal of Engineering Mechanics, 2005, 131(1), 88-96.
- Jerman, B., Podržaj, P., Kramar, J. An Investigation of Slewing-Crane Dynamics During Slewing Motion — Development and Verification of a Mathematical Model. International Journal of Mechanical Sciences, 2004, 46(5), 729-750.
- Sciavicco L., Siciliano B., Modelling and Control of Robot Manipulators Second Edition, Springer-Verlag, London, 2000, ISBN 978-1-85233-221-1
- Neupert, J., Arnold, E., Schneider, K., Sawodny, O., 2010, Tracking and anti-sway control for boom cranes., Control Engineering practice, 18, 31-44
- Onishi, E., Tsuboi, I., Egusa, T., Uesugi, M. Automatic control of an overhead crane. In Proceedings of the Eight Triennal IFAC World Congress, Volume 4: A. Mechanical Systems and Robots, by Pergamon Press. 1982, 1885-1890
- Papadopoulos, S. Sarkar, On the dynamic modeling of an articulated electrohydraulic forestry machine, Proceedings of the 1996 AIAA Forum on Advanced Developments in Space Robotics, Madison, WI, August 1-2, 1996
- Вайнсон А. Подъемно-транспортные машины, Машиностроение, Москва, 1989.
- Дивизиев, В. Основи на товароподемните машини, Техника, София, 1986.[schema type=»book» name=»К ДИНАМИКЕ МЕХАНИЗМА ВРАЩЕНИЯ АВТОМОБИЛЬНОГО ГИДРАВЛИЧЕСКОГО КРАНА-МАНИПУЛЯТОРА» description=»Работа посвящена моделированию динамики механизма вращения автомобильного гидравлического крана-манипулятора. Для целей настоящего исследования, кран рассматри-вается как кинематическая цепь с тремя степенями свободы – одна степен свободы имеется у совместно вращающихся опорно-поворотной колонны и двух звеньев стрелы, а две степени свободы – у груза, представленного как сферический маятник. Для получения дифференци-альной модели механической системы используются уравнения Лагранжа второго рода, а изменение давления в полостях приводного гидроцилиндра описывается двумя дифференциальными уравнениями первого порядка. Численное решение полученной дифференциальной модели и анализ полученных результатов показывает, что предложенная методика может быт с успехом использована для решения такого рода динамических задач.» author=»Григоров Божидар Бориславов, Митрев Росен Пешев» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2016-12-27″ edition=»euroasia-science.ru_26-27.02.2016_2(23)» ebook=»yes» ]