

Рассматриваемая оптико-электронная стереоскопическая система измерения дальности (рисунок 1) содержит захватное устройство, состоящее из левой и правой цифровых камер, каждая из которых размещены на жестком стержне, и ЭВМ, выполняющую функцию вычислительного блока с измерительным приложением [3], совместно обеспечивающих возможность захвата стереоизображений и автоматическое измерение дальности до указанных пользователем объектов.

Рисунок 1. Внешний вид оптико-электронной
стереоскопической системы
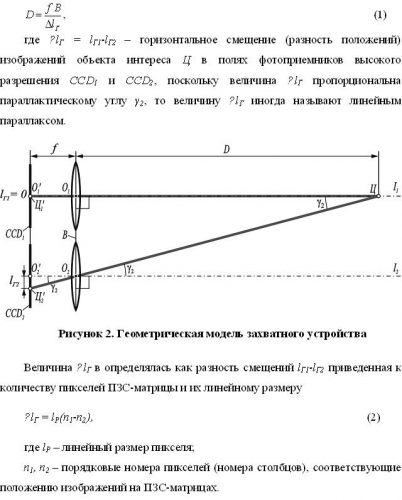
Дальность D (рисунок 2) до объекта Ц в определялась по величинам параллакса γ2, базы прибора В и фокусного расстояния объективов f по следующему выражению [1, с. 273, 2 с. 43]

Испытание оптико-электронной стереоскопической системы измерения дальности показало, что в целом ошибка определения дальности лежит в пределах расчетных значений [1, с. 273], но вместе с тем и выявило рад недостатков, а именно:
— для обеспечения точных измерений необходима предварительная настройка (калибровка) захватного устройства, заключающаяся в приведении оптических осей левой и правой камер к параллельному состоянию в пространстве, что было связано с достаточно большими временными затратами, кроме того, незначительные воздействия на захватное устройство приводили к необходимости проведения повторной калибровки;
— малейшее отклонение оптических осей камер от параллельного состояния в пространстве приводило к значительным ошибкам в измерении дальности, иногда вплоть до получения отрицательных значений;
— неоднократно при настроенном захватном устройстве наблюдались ошибки измерения, когда до явно расположенных на разном удалении объектов измеренная макетом дальность составляла одну и туже величину.
Помимо этого, на взгляд авторов, недостатком рассматриваемой оптико-электронной стереоскопической системы измерения дальности являлась необходимость постоянного наведения оптической оси левой камеры на объект интереса, что при проведении достаточно большого количества измерений до объектов расположенных в разных частях поле зрения значительно увеличивало время работы и способствовало «растройке» захватного устройства, а так же то, что для использования подобных систем в различных системах технического зрения для обеспечения высокоточных измерений необходимо осуществлять подбор по техническим данным двух идентичные камер, что накладывает определенные ограничения на практическую реализацию.
Для устранения причин возникновения выявленных недостатков был проведен анализ практического применения рассматриваемой оптико-электронной системы измерения дальности и выражений (1) и (2) положенных в основу её работы.
Если обеспечена строгая параллельность оптических осей камер, входящих в состав захватного устройства, то рабочую зону, т.е. зону пересечения полей зрений используемых камер, как показано на геометрической модели, представленной на рисунке 3,а, условно можно представить в виде совокупности четырёхугольников образованных при пересечении полей зрения отдельных элементов фоточувствительного приемника высокого разрешения, например пикселей ПЗС-матриц.
На рисунке 3,а ПЗС-матрицы CCD1 и CCD2 для наглядности представлены состоящими из девяти пикселей. Размеры четырехугольников определяют величину ошибки определения дальности. В месте с тем, как следует из выражений (1) и (2), в пределах рабочей зоны можно отобразить линии равных смещений, т.е. линий при нахождении в любой из точек которых объекта, до которого определяется дальность, смещение ∆lГ будет неизменно. Так, например, как показано на рисунке 3,а, при нахождении объекта интереса в любой из точек, принадлежащих линии ∆n=2, например, в точках Ц1 и Ц2, смещение изображений всегда будет равно двум линейным размерам пикселя. Из этого следует, что дальность до объекта определяется как расстояние по перпендикуляру от базовой линии О1О2. Это условие всегда необходимо учитывать, особенно в тех случаях, когда измерение дальности проводится до различных объектов относительно одной точки на местности, в которой установлена измерительная система.
При невыполнении условия параллельности оптических осей объективов используемых камер линии с одинаковыми смещениями принимают вид близкий к дуге (рисунок 3,б), что приводит к неоднозначности в определении дальности относительно базовой линии О1О2. Так из геометрической модели, представленной на рисунке 3,б видно, что до объекта Ц1, как и до объекта Ц2 дальности относительно базовой линии О1О2 составят D1, D2, при этом D1 ≠ D2, хотя из выражений (1) и (2) следует что дальности D1 и D2 должны быть равны, так как объекты Ц1 и Ц2 находятся на линии с одинаковыми смещениями изображений во всех её точках.
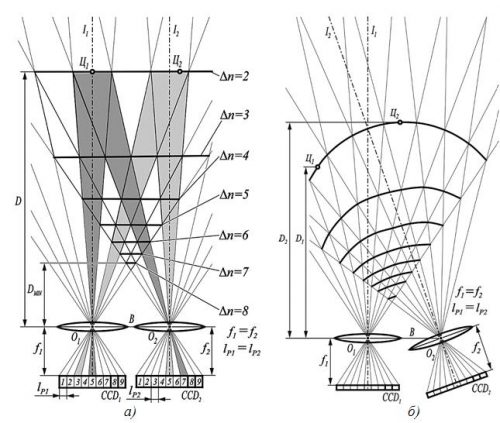

Рисунок 3. Геометрия линий равных смещений при:
а – идеально откалиброванном захватном устройстве;
б – при отклонении правой камеры от параллельного состояния
На рисунке 4,а—г иллюстрируются геометрия линий равных смещений в различных условиях: когда обе камеры имеют одинаковые параметры (фокусные расстояния объективов f и размеры пикселей lP), но их оптические оси I1, I2 или сходятся (рисунок 4,а) в плоскости измерений или расходятся (рисунок 4,б); когда оптические оси I1, I2 обеих камер параллельны, но сами камеры имеют объективы с различными фокусными расстояниями f1 ≠ f2 (рисунок 4,в); или когда уже размеры пикселей ПЗС-матриц CCD1 и ССD2 неодинаковы, то есть lP1 ≠ lP2 (рисунок 4,г).
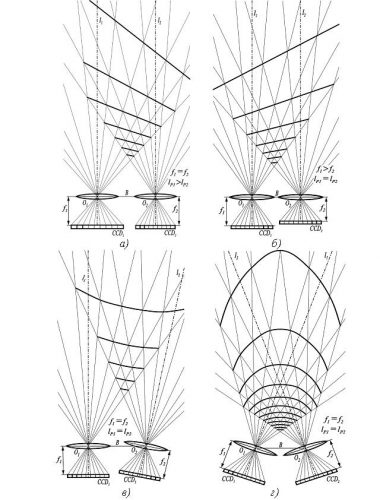

Рисунок 4. Геометрия линий равных смещений в различных условиях
Понятно, что в действительности с учетом разброса технических данных при изготовлении камер, точности проведенной калибровки захватного устройства будет наблюдаться ситуация объединяющая в себе в той или иной мере все приведенные на рисунке 4,а—г случаи.
Кроме этого, необеспечение параллельности оптических осей камер захватного устройства приводят к возникновению ошибок измерения дальности.
Рассмотрим этот случай.
Пусть в захватном устройстве используются две идентичных цифровых видеокамеры, подобранные таким образом, что разбросом их характеристик можно пренебречь, а оптические оси I1, I2, объективы оптическими центрами О1, О2, ПЗС-матрицы CCD1 и CCD2 определяют действительное положение камер захватного устройства в пространстве, тогда I1′, I2′, О2′, CCD2′ будут отражать положение элементов камер принимаемое в расчетах согласно выражения (1). Дальность D соответствует действительной дальности до объекта интереса, D′ – расчетной дальности.
Как показано на рисунке 5, оптическая ось левой (верхней) камеры I2′ отклонена от оси I1′, которую бы она занимала в случае абсолютной параллельности оптических осей, на некоторый угол α1. Изображение от объекта Ц, пройдя через оптический центр О2 объектива второй камеры, спроецируется на ПЗС CCD2 в точке, соответствующей номеру пикселя n2.
В месте с тем, формула расчета дальности (1) не имеет переменной, характеризующей отклонение оптической оси второй камеры, а это приведет к тому, что в вычислениях будет принято положение камеры соответствующее I2′, О2′ и CCD2′ не совпадающее с действительными I2, О2, CCD2, и характеризующая положение правой камеры отклонённой от действительного положение по часовой стрелке на угол α2′, когда оптические оси I1 и I2′ будут параллельны.
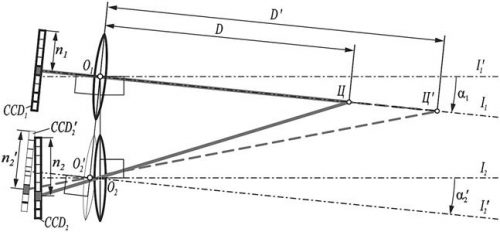

Рисунок 5. Возникновение ошибки измерения дальности
Проведя из пикселя матрицы CCD′2 с номером соответствующим действительно измеренному n2′=n2 через расчетный оптический центр объектива О2′ до пересечения с действительной оптической осью I1, на которой по условиям находится объект интереса Ц, получим точку расчетного положения объекта Ц′. Из представленной геометрической модели видно, что рассчитанная дальность D′ не будет соответствовать действительной дальности D, а значит будет допущена ошибка в определении дальности. При этом ошибка определения дальности, как видно из рисунка 5, будет тем значительнее, тем больше угол α1.
Работа по устранению выявленных источников возникновения ошибок и неоднозначности измерения дальности позволила ряд задач, заключающихся в обеспечении:
— безошибочного измерения дальности до объектов в условиях непараллельности оптических осей левой и правой камер, а также, когда левая и правая камеры имеют как одинаковые, так и различные технические данные, а именно фокусные расстояния объективов и параметры фоточувствительных приемников высокого разрешения;
— однозначности измерений дальностей до всех объектов независимо от их расположения в рабочей зоне.
Раскрытие решения указанных задач на взгляд авторов заслуживает отдельных публикаций, поэтому в данной статье не приведено.
Список литературы:
- Зубарь А.В., Программно-аппаратная реализация оптико-электронной стереосистемы определения дальности // Зубарь А.В., Кайков К.В., Майстренко В.А. // Омский научный вестник № 3 (123) – Омск: ОмГТУ, 2013. – с. 273-278.
- Коротаев, В. В. Телевизионные измерительные системы // В. В. Коротаев, А. В. Краснящих // Учеб. пособие. – СПб.: СПбГУ ИТМО, 2008. – с. 43–47.
- Программа вычисления дальности до объектов интереса по изображениям с двух цифровых видеокамер // Свидетельство о государственной регистрации ПрЭВМ № 2013661916 от 18 декабря 2013 г.[schema type=»book» name=»Источники возникновения ошибок и неоднозначности измерений дальности оптико-электронной стереоскопической системой » author=»Зубарь Алексей Владимирович, Кайков Кирилл Владимирович, Аппинг Гарри Анатольевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-06-20″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.12.2014_12(09)» ebook=»yes» ]