

Аппаратная часть гидроакустического модема состоит из двух модулей: корабельного и автономного. Автономный модуль собирает информацию с АНПА и передает ее корабельному модулю. Между двумя модулями реализуется полудуплексная связь на несущей частоте 25 кГц в полосе 5 кГц, причем нисходящий поток (в сторону корабельного модуля) является основным и высокоскоростным (для передачи данных), а восходящий поток – низкоскоростным (для управления). Вариант исполнения аппаратной части модема представлен на рисунке 1.
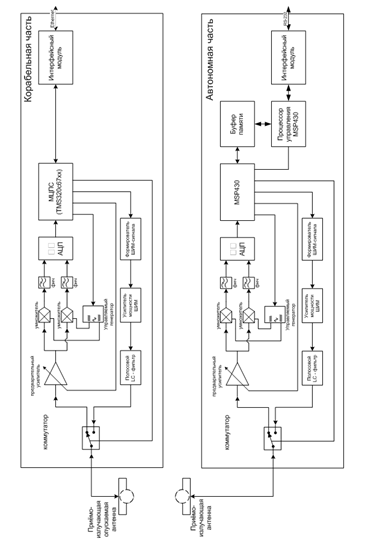

Рис. 1 – Аппаратная часть гидроакустического модема
Структура передающей и приемной систем показана на рис. 2. Каждая из них условно делится на два уровня: физический и канальный. Физический уровень определяет связь на уровне сигналов, преобразует поток бит в сигнал и наоборот. Канальный уровень обеспечивает контроль ошибок, чтение заголовков, преобразование битового потока в биты пользовательских данных.
Помехоустойчивое кодирование предназначается для внесения избыточных бит, позволяющих приемнику корректно принять отправленную информацию. Как видно из рис. 2, алгоритмическая составляющая приемника более нагружена по сравнению с передатчиком. Это естественно, поскольку, приемник должен с достаточной точностью выполнять различные виды синхронизации, а также компенсацию канала распространения.
На рис. 3 показаны используемые каналы связи, которые работают в полудуплексном режиме. Высокоскоростной канал передачи данных использует OFDM-сигналы, низкоскоростной канал управления – DTMF-сигналы, которые представляют собой многочастотную совокупность двутональных сигналов. Их выбор обусловлен относительной простотой детектирования на современных вычислительных средствах, что очень важно для автономного модуля.
На рис. 4 показана используемая схема помехоустойчивого кодирования и декодирования.
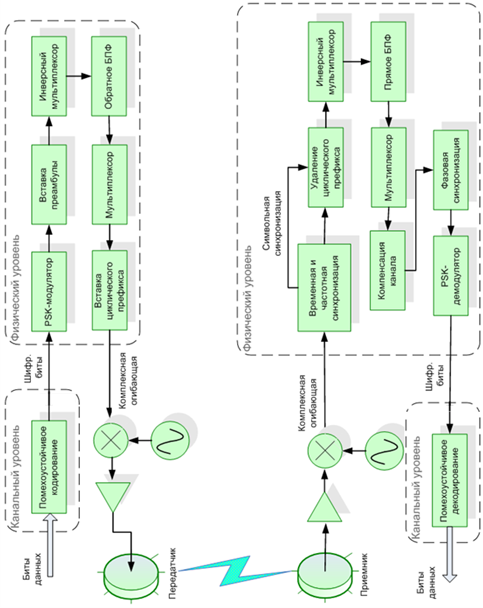

Рис. 2 – Структура приемной и передающей систем
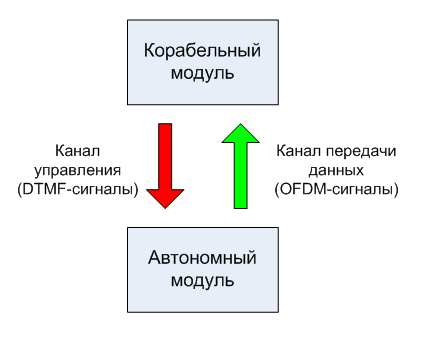

Рис. 3 – Каналы связи
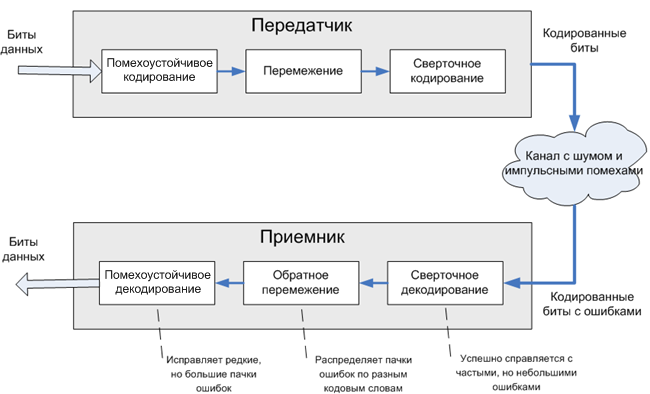

Рис. 4 – Каскадное кодирование
Структура сигнального кадра показана на рис. 5. Кадр состоит из преамбулы и блока символьных данных. Преамбула, в свою очередь, состоит из двух обучающих последовательностей, предназначение которых подробно расписано на нижеследующем рисунке. Длительность защитного интервала символа выбирается равной одной четверти длительности символа. Ее значение подобрано для борьбы с наиболее типичными задержками в канале при горизонтальном распространении. В случае вертикальной передачи данных защитный интервал может быть существенно укорочен.
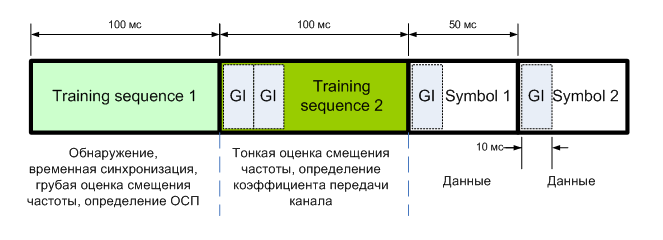

Рис. 5 – Структура сигнального кадра
Первая обучающая последовательность состоит из десяти коротких субпоследовательностей, длительность каждой их которых равняется 10 мс. Такая периодичность необходима для надежного обнаружения сигнального кадра, а также для точной фреймовой синхронизации.

Рис. 6 – Комплексная огибающая первой обучающей последовательности.
Вторая обучающая последовательность состоит из двух длинных субпоследовательностей, длительность каждой их которых равняется длительности символа, т.е. 40 мс.
Таким образом, минимальная длина сигнального кадра (с наличием только одного символа данных), равна 250 мс. Комплексная огибающая такого кадра изображена на рис. 7. Вообще длина сигнального кадра определяется временем, в течение которого канал передачи и взаимного положение приемника и передатчика остаются постоянными. При небольших относительных скоростях (до 1 м/с), таким времени можно считать 0.5 сек. При этом в сигнальный кадр можно вместить шесть символов данных, что, несомненно, более эффективно.
На рис. 9 показана спектрограмма сигнального кадра на несущей частоте 25 кГц. Видно, что занимаемая полоса равна 5 кГц.

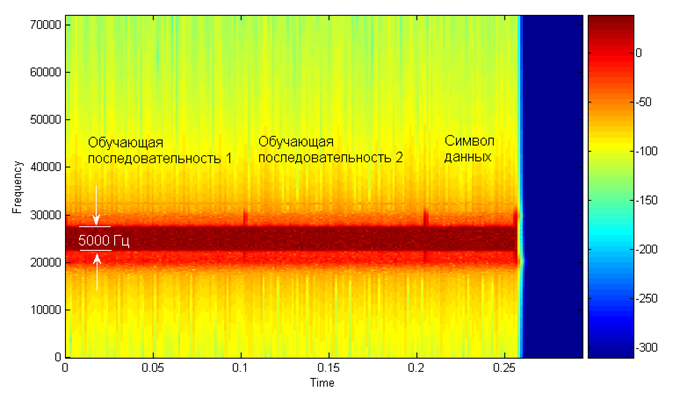

Рис. 9 – Спектрограмма сигнального кадра на частоте несущей 25 кГц и полосой 5 кГц
Расположение бит в кадре и их назначение показано на рис. 9. Видно, что 640+512=1152 бит используются для обнаружения и адаптации к условиям распространения, а 256*4=1024 бит – для передачи данных. Однако не все из этих бит служат исключительно для передачи полезной информации. Каждый символ имеет 8 пилотных поднесущих (8 бит), помехоустойчивый код (16 бит), 8 резервных бит.


Рис. 10 – Расположение бит в кадре
Канал управления реализуется с помощью DTMF-сигналов (диалтоны), которые формируются как сумма двух тональных сигналов:


Для лучшей помехоустойчивости декодирования одна команда формируется как посылка двух одинаковых DTMF-сигналов, разделенных зоной молчания 20 мс (см. рис. 11). Длительность сигнала 15 мс выбрана, исходя из предполагаемой нечувствительности к максимальному доплеровскому смещению при скорости 1 м/с. Это максимальное смещение равно 25000*1/1500 = 17 Гц. Частотное разрешение импульса 1/0.015 = 67 Гц. Следовательно, детектируемые спектральные компоненты не «поплывут».
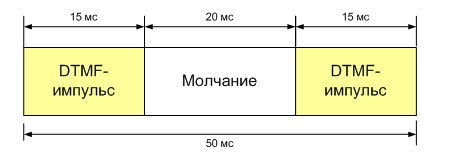

Рис. 11 – Структура управляющего сигнала
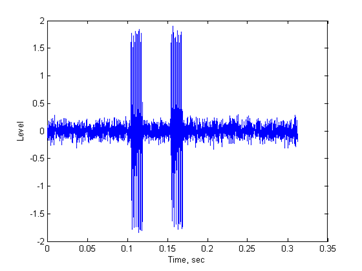

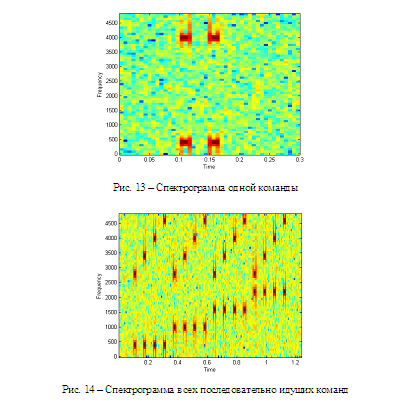
Рис. 12 – Осциллограмма одной команды

Обнаружение сигнала производится с помощью вычисления ненормированных корреляционных коэффициентов в двух смежных окнах обработки:
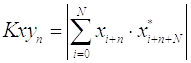

где x1 – отсчеты комплексной огибающей, N – ширина окна обработки, которая равна длине субпоследовательности первой обучающей последовательности.
Поскольку первая обучающая последовательность состоит из 10 одинаковых субпоследовательностей, коэффициенты, вычисленные по формуле (2), будут выглядеть следующим образом (см. рис. 15): длительное превышение ( ) над уровнем шума во время приема первой обучающей последовательности. Характер такого превышения порога позволяет уверенно его обнаружить и исключить ложный прием.
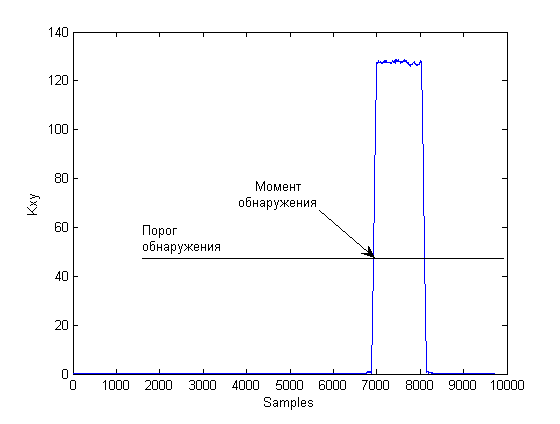

Рис. 15 – Выход взаимно-корреляционной обработки комплексной огибающей. Момент превышения порога обнаружения означает начало первой обучающей последовательности, т.е. стартовой позиции кадра
Чтобы знать, в каких условиях осуществляется связь, приемник вычисляет отношение сигнал/помеха:

В случае шума плавает в районе единицы, а в случае присутствия сигнала имеет резко выраженный максимум (см. рис. 16), который характеризует помеховую обстановку в настоящий момент.
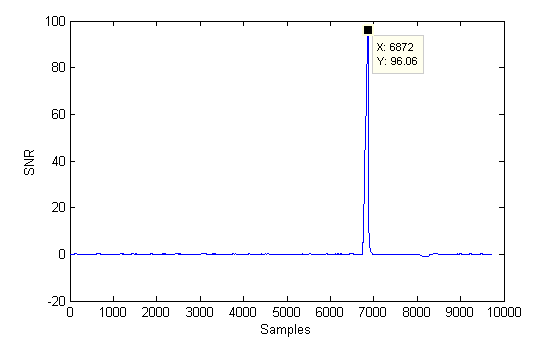

Рис. 16 – Измеренное отношение сигнал/помеха по мощности, выраженное в разах
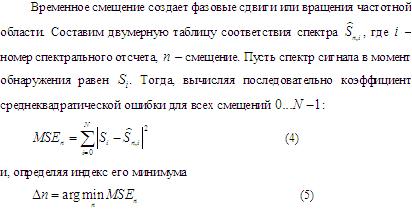
Момент обнаружения, определенный по превышению порога корреляционных коэффициентов (3), случайно разбросан в пределах . Как уже неоднократно утверждалось, необходима точная оценка начала фрейма и, как следствие, начала Фурье-окна. Для этого после момента обнаружения производится выравнивание (фреймовая синхронизация) границ фрейма с помощью той же первой обучающей последовательности.

можно определить абсолютное время прихода сигнального кадра.
Зависимость среднеквадратической ошибки от смещения показана на рис. 17 и рис. 18.


Компенсация сдвига несущей частоты производится с помощью обучающей последовательности. Допустим, отсчетов обучающей последовательности содержат 2 идентичных субпоследовательности, начиная с индекса . Их корреляция формируется следующим образом:



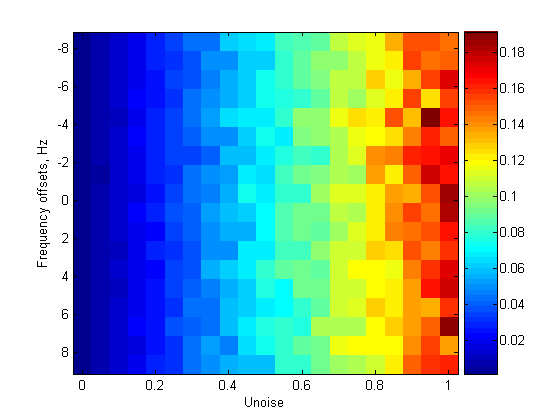
Моделируя влияние гауссовой помехи на метод вычисления частотного сдвига (10), получим результат, изображенный на рис. 19.

При использовании когерентных методов модуляции приемнику необходимо сообщать начальное значение фазы. Для этой цели служит специальная синхронизирующая поднесущая (см. рис. 20). Фаза этой поднесущей при формировании OFDM-символа принимается за ноль. Исходя из этого, приемник должен либо пристраивать FFT-окно для демодуляции, либо учитывать фазовый сдвиг после демодуляции. Мы воспользуемся вторым методом. Допустим, после фреймовой синхронизации и FFT-преобразования спектр символа равен , где — индексы поднесущих, причем нулевой индекс соответствует самой несущей частоте . Поднесущая на этой частоте используется для фазовой синхронизации.
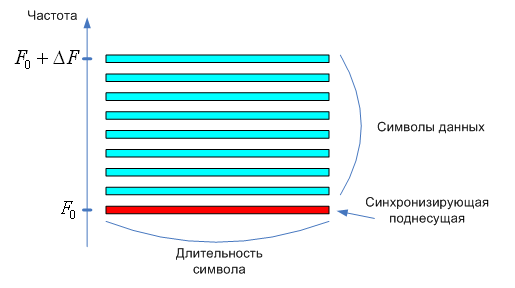

Рис. 20 – Поднесущие OFDM-символа
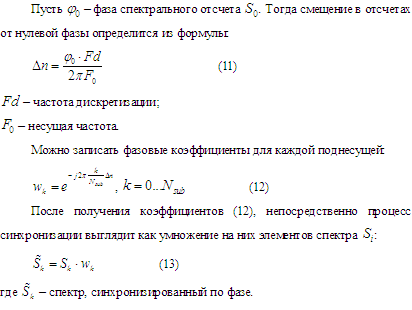

Принимаемый сигнал искажается каналом распространения, вводя на поднесущие фазовый шум. Если не учитывать канал, то ошибки при демодуляции неизбежны. Если использовать широкополосный синхросигнал, который будет давать информацию об условиях в канале, то приемник может вычислять коэффициент передачи канала:
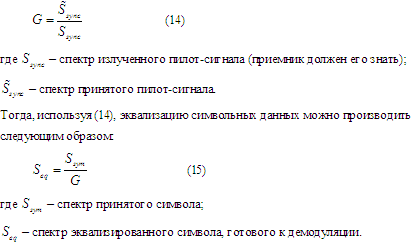

Диаграмма состояний автономного модуля изображена на рис. 21. Во время отсутствия связи автономный модуль находится в спящем режиме, или режиме ожидания. После детектирования вызывного сигнала модуль излучает ответный тон и ждет запроса на излучение последовательности тестовых OFDM-пакетов. После получения запроса модуль передает тестовые последовательности, принимая и детектируя которые, корабельный модуль определяет оптимальный режим работы. Далее корабельный модуль передает разрешение на старт и начинается передача данных.


Рис. 21 – Диаграмма состояний
Находясь в режиме ожидания, автономный модуль для экономии энергоресурсов периодически сканирует одну спектральную компоненту, поскольку сигнал вызова представляет собой длинную тональную посылку с частотой комплексной огибающей 1000 Гц. При детектировании сигнала длиной 2000 мс модуль с паузой 1000 мс излучает ответный сигнал частотой 1500 Гц и запускает таймер на 5 сек, в течение которого он должен получить команду на включение (RDY). Если этого не происходит, модуль переходит обратно в спящий режим (см. рис. 22 и рис. 23).
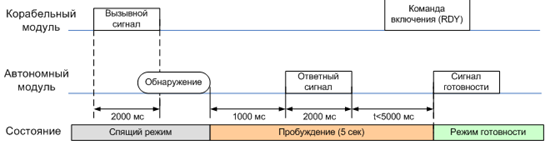

Рис. 22 – Процедура обмена для перехода в рабочий режим
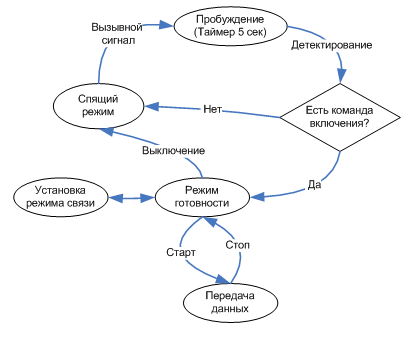

Рис. 23 – Логические состояния автономного модуля

