

Введение
В число наиболее актуальных проблем, стоящих сегодня перед научно-техническим сообществом, входит создание интеллектуальных систем управления и поддержки принятия решений. Один из многообещающих подходов в данной области основан на использовании искусственных нейронных сетей (НС), которые позволяют решать такие важные задачи как распознавание и классификация образов, идентификация систем, аппроксимация функций, прогнозирование процессов и многие другие [1].
Одна из проблем, связанных с реализацией перспективных интеллектуальных систем состоит в том, что требуется обеспечить их адаптивность, т.е. способность оперативно перестраиваться при работе в условиях многочисленных неопределенностей. Существующие НС в своем большинстве не обладают требуемым уровнем адаптивности.
В работе [2] была предложена концептуальная модель нейронной сети, которая способна обеспечить контекстно-зависимое обучение и распознавание, т.е. способна учитывать временну́ю динамику работы всей сети для более точного определения текущего состояния окружающей среды. Это может повысить качество работы в условиях зашумлённых и неполных данных, а также в условиях наличия неоднозначностей.
Для реализации данной НС были выдвинуты ряд требований к функциональной единице сети, среди которых робастность к шумам, наличие временной динамики (для выявления временны́х корреляций) и другие. В данной работе предлагается и исследуется модель т.н. микроансамбля, объединения нейронов, которое обладает необходимыми свойствами и может рассматриваться как атомарная единица обработки информации. В перспективе такой микроансамбль может быть применён для реализации адаптивной НС.
Модель нейрона
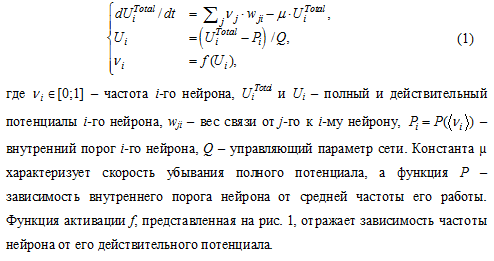
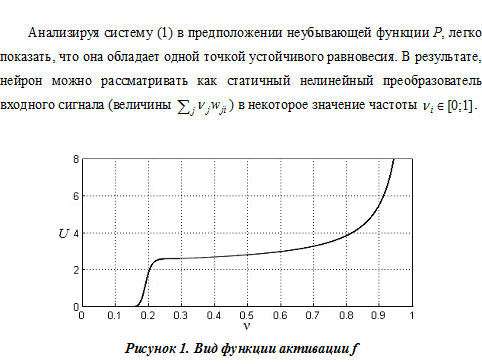
В основе модели нейрона лежит работа [3], в которой автор исследовал проблему создания биологически правдоподобной искусственной нейронной сети. Однако в разрабатываемой модели акцент был сделан на прикладную значимость, что позволило значительно упростить оригинальную модель, отказавшись от биологически обоснованных переменных, сохранив при этом полезные с точки зрения решаемой задачи свойства. В результате была получена следующая Firing-Rate модель нейрона:







Когда в момент времени t1 на вход был подан паттерн, отличающийся от эталона на 25%, микроансамбль перешёл в полуактивный режим работы. Этот режим сохранялся до момента t2, когда был использован эталонный входной паттерн, в результате чего произошёл переход в активный режим работы. Далее микроансамбль проявил эффект пост-стимульной активности, когда продолжил работу в активном режиме, несмотря на исчезновение входного сигнала (отсечка t3). Однако в момент времени t4 произошло самозапирание микроансамбля, т.е. он перешёл в неактивный режим в результате действия внутреннего порога нейронов.
В момент времени t5 повторно был использован входной паттерн, отличающийся от эталона на 25%. В результате, микроансамбль вновь перешёл в полуактивный режим работы. Однако на этот раз постепенно уменьшалось значение управляющего параметра Q, что привело к уменьшению порога активации и, как результат, к переходу микроансамбля в активный режим работы (отсечка t6), несмотря на отличия входного паттерна от эталона.
После исчезновения входного сигнала (отсечка t7) микроансамбль снова проявил свойство пост-стимульной активности, которая должна была закончиться эффектом самозапирания. Однако в этом случае постепенно увеличивалось значение параметра Q, что привело к изменению порога деактивации. В результате эффект самозапирания произошёл гораздо раньше по сравнению с предыдущим случаем (![]()

В момент времени t9 на вход был подан эталонный паттерн, в результате чего микроансамбль перешёл в активный режим. Но в момент t10 была смоделирована ситуация, когда на часть нейронов (50%) было подано дополнительное отрицательное возбуждение (торможение), в результате чего они стали неактивны. Это привело к тому, что остальные нейроны микроансамбля оказались не способны продолжить работу в активном режиме и перешли в полуактивный режим. А после исчезновения входного паттерна (отсечка t11) все нейроны перешли в неактивное состояние.
Свойства микроансамбля
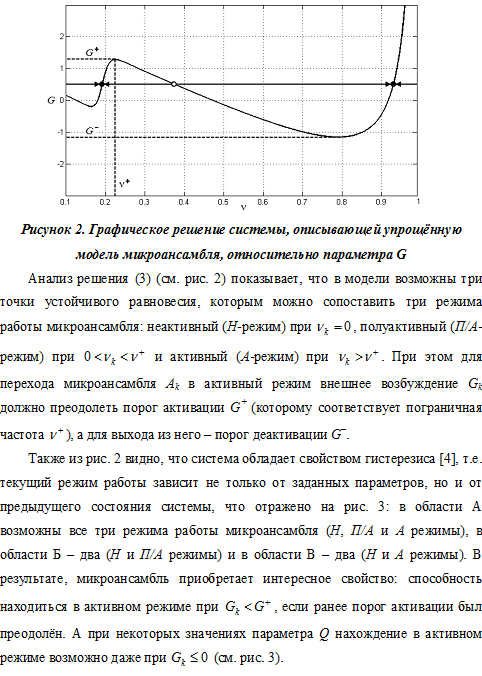
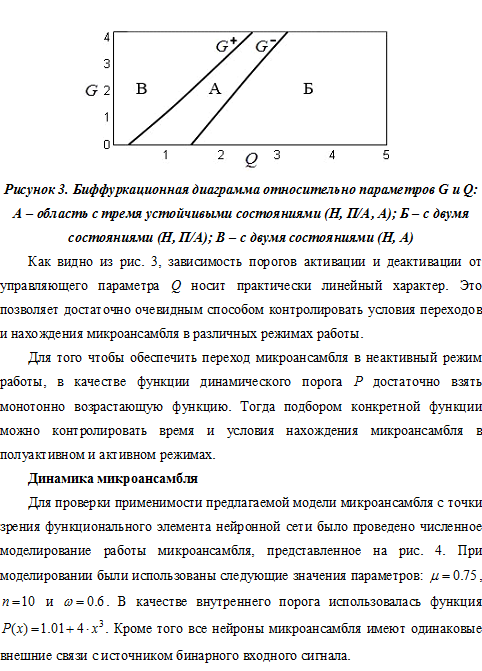
Таким образом, при предъявлении внешнего стимула на нейронах микроансамбля Ak возникает внешнее возбуждение Gk, равное скалярному произведению вектора весовых коэффициентов нейрона (эталон) и входного паттерна. Если эти векторы достаточно близки, то величина Gk преодолеет порог активации G+, и микроансамбль перейдёт в активный режим, что будет соответствовать факту распознавания эталона. В противном случае, произойдёт переход в полуактивный режим, что можно рассматривать как состояние неопределённости.
При этом, меняя значение управляющего параметра Q, мы можем контролировать пороги активации и деактивации. В первую очередь, это позволяет влиять на степень допустимых отклонений входного паттерна от эталона, при которых он всё-таки будет распознан микроансамблем как эталонный. Это свойство может быть применено для реализации робастного к шумам и неполноте данных распознавания.
Важным свойством микроансамбля является наличие пост-стимульной активности. Оно даёт возможность формировать и использовать временны́е ассоциативные связи между микроансамблями. В результате, это можно использовать для реализации контекстно-зависимого распознавания, при котором результат текущего распознавания напрямую зависит от ранее распознанных образов.
Также тот факт, что для стабильной работы микроансамбля как целостной единицы необходимо участие практически каждого нейрона, может быть использован для реализации механизмов конкурентного обучения.
Заключение
В работе была предложена модель нейронного микроансамбля, который рассматривается как базовый функциональный элемент разрабатываемой адаптивной нейронной сети [2]. В результате анализа модели было показано наличие у неё полезных свойств, которые могли бы обеспечить в рамках работы полноценной сети формирование и использование временно́го контекста, а также робастность к шумам и неполноте данных.
Предметом дальнейших исследований является разработка правил обучения, обеспечивающих свойства адаптации связей между элементами сети, и реализация полноценной нейросетевой модели на основе предлагаемого подхода.
Список литературы:
- Хайкин С. Нейронные сети: полный курс, 2-е изд. / пер. с англ. – М.: Издательский дом «Вильямс», 2008. – 1106 с.
- Простов Ю.С., Тюменцев Ю.В. Мультимодальная ассоциативная нейронная сеть с контекстно-зависимой адаптацией // Авиация и Космонавтика-2013. 12-я Международная конференция. Тезисы докладов. – СПб.: Мастерская печати, 2013. – с. 618-619.
- Емельянов-Ярославский Л.Б. Интеллектуальная квазибиологическая система (Индуктивный автомат). – М.: Наука, 1990. – 112 с.
- Красносельский М.А., Покровский А.В. Системы с гистерезисом. – М.: Наука, 1983. – 272 с.[schema type=»book» name=»ИССЛЕДОВАНИЕ ГИСТЕРЕЗИСНОГО МИКРОАНСАМБЛЯ КАК ОБРАЗУЮЩЕГО ЭЛЕМЕНТА АДАПТИВНОЙ НЕЙРОННОЙ СЕТИ» author=»Простов Юрий Сергеевич, Тюменцев Юрий Владимирович» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-05-24″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.01.2015_01(10)» ebook=»yes» ]