

ДАТЧИК ПАНОРАМНОГО ОБНАРУЖЕНИЯ ЦЕЛИ И УНИЧТОЖЕНИЯ ПРОТИВНИКА ПО МОДУЛИРОВАННОМУ ЛАЗЕРНОМУ ЛУЧУ В 3D – ПРОСТРАНСТВЕ “ЛАДОГА-1М”
С.Н. Григорьев-Фридман
АО НПП «Полёт»
В конструкции датчика панорамного обнаружения цели и уничтожения противника по модулированному, лазерному лучу наведения в 3D-пространстве “ЛАДОГА-1М”, согласно рис. 1 содержится как минимум пара полупроводниковых, лазерных диодов или твёрдотельных лазеров с накачкой двумя лазерными диодами, запитанные от положительной клеммы стабилизатора напряжения 12 и блока бесперебойного питания 13 на анод, а его катод соединён прямым проводом, через цепочку сток-исток полевого транзистора, в качестве коммутирующего устройства-ключа VT1, с двумя переменными, регулировочными резисторами, выполненными на базе потенциометра RP1 14 и RP2 15 или с постоянными, проволочными резисторами, для ограничения предельного значения питания коммутирующих устройств ― двух полевых транзисторов VT1 и VT2 по току. В каждой, из двух (или нескольких!) лазерных панорам 6 и 7, внутри, имеется своё, отдельное коммутирующее устройство-ключ Q1 или Q2. В качестве цели 1 был выбран, например, самолёт потенциального противника. Отражённые от цели (потенциального противника) видеолучи 2, видимого поддиапазона (400…700 нм) или ИК – диапазона электромагнитных волн улавливаются и фокусируются внешней, подвижной линзой регулируемого коллиматора 3―4―5 в приёмной оптической системе датчика. Датчик, согласно рис. 1, состоит из следующих элементов и узлов: 3 ― внешняя, подвижная, оптическая линза регулируемого коллиматора в оптическом монокуляре; 4 ― основная, стационарная (неподвижная), оптическая линза регулируемого коллиматора; 5 ― внутренняя, подвижная, оптическая линза регулируемого коллиматора в оптическом монокуляре; 6 ― первая, положительная, лазерная панорама, работающая по приёму-передаче лазерного луча, в ближнем и частично в среднем, пограничном поддиапазонах, ИК – диапазона электромагнитных волн, по часовой стрелке, например, на длине волны λ = 820 нм; 7 ― вторая, отрицательная лазерная панорама, работающая по приёму-передаче лазерного луча, в ближнем и частично в среднем, пограничном поддиапазонах, ИК – диапазона электромагнитных волн, против часовой стрелки, например, на длине волны λ = 955 нм; 8 ― падающий, лазерный луч, идущий из первого лазера к обнаруженной (увиденной) цели; 9 ― лазерный луч, отражённый от цели и принятый фотодатчиком (на базе фотодиода, или же составного, трёхкаскадного фототранзистора); 10 ― падающий, лазерный луч, идущий из второго лазера к цели; 11 ― лазерный луч, отражённый от цели и принятый фотодатчиком (фотодиодом или фототранзистором); 12 ― блок источника постоянного (выпрямленного) напряжения Uвых._~ = 24 В; 13 ― блок стабилизатора постоянного напряжения; 14 ― переменный, регулировочный резистор на базе потенциометра RP1, для ограничения предельного значения питания током первой, положительной, лазерной панорамы 6; 15 ― переменный, регулировочный резистор на базе потенциометра RP2, для ограничения предельного значения питания током второй, отрицательной, лазерной панорамы 7; 16 ― выпрямительный блок; 17 ― бортовая сеть (например, самолёта) напряжения U = 27 В; 18 ― кнопка увеличения панорамного изображения цели и противника путём увеличения фокусного расстояния между коллиматором и датчиком; 19 ― кнопка уменьшения панорамного изображения цели и противника путём уменьшения фокусного расстояния между коллиматором и датчиком; 20 ― ЭВМ (компьютер); 21 ― блок АЦП – ЦАП; 22 ― монитор (экран). Схема и принцип работы датчика “ЛАДОГА-1М” представлена на рис. 1.
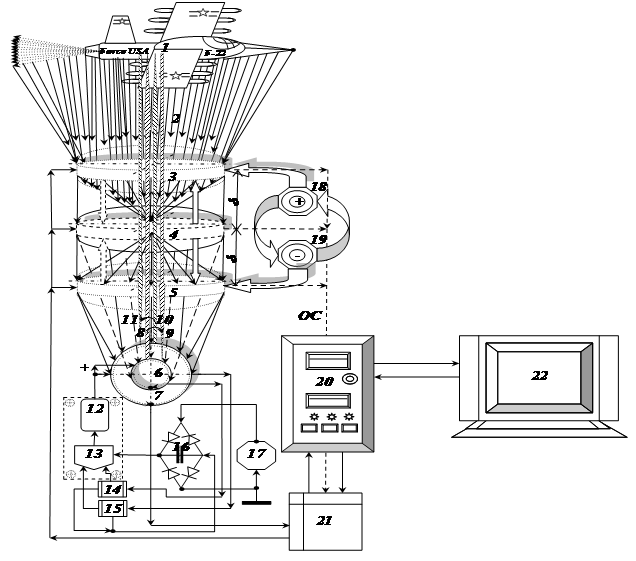

Рис. 1
Между подвижными оптическими линзами 3 и 5 в регулируемом коллиматоре, компьютером 20 с монитором 22, через блок АЦП – ЦАП 21 существует постоянно действующая обратная связь (ОС), для оперативной и эффективной регулировки процессом юстировки лазерного луча на предполагаемую цель и удержание потенциального противника в зоне оптимального охвата телескопического угла пеленгации [2―4].
Циркуляционно-круговая головка наведения и удержания цели (например, самолёта потенциального противника) в зоне телескопического угла обнаружения и слежения за поведением обнаруженной цели, выполнена на базе полупроводникового, лазерного диода, лазерного диода на основе двойной гетероструктуры из арсенида галлия GaAs и арсенида алюминия галлия GaAlAs или твёрдотельного лазера, с накачкой мощным светодиодом или полупроводниковым, лазерным диодом. Лазерная ГСН, обнаружения и слежения за целью технологически выполнена в форме многоступенчатых слоёв для лазерного облучения когерентным, узконаправленным потоком фотонов. Лазерный луч №1, например, синхронно движется по кругу, радиально, по часовой стрелке, от датчика к обнаруженной цели и обратно, к фотоприёмной матрице самого датчика, на длине волны равной λ1 ≈ 820 нм. Лазерный луч №2, например, также синхронно движется по кругу, радиально, против часовой стрелки, от датчика к обнаруженной цели и обратно, к фотоприёмной матрице самого датчика, на длине волны равной λ2 ≈ 955 нм. Следующие ступени лазерной ГСН облучают цель также синхронно двигаясь радиально, по часовой или же против часовой стрелки, с длинами волн λ3 ≈ 1250…1300 нм, λ4 ≈ 1550 нм и λ5 ≈ 2100…2150 нм соответственно и т.д. Все эксплуатационные частоты и длины волн выбираются из поддиапазонов ближнего и, в редком случае, пограничного слоя с λ6 ≈ 3500…3885 нм, среднего поддиапазона ИК-диапазона электромагнитных волн, где экспериментально обнаружено максимальное значение коэффициента пропускания мощности модулированного сигнала в телескопической толще лазерного луча [1―10].
Датчик технологически включает в себя сдвоенную, связанную систему двух монокуляров с кратностью увеличения или уменьшения изображения цели или иного объекта в оптической системе регулируемого коллиматора, например, от 2× до 100× (2× ≤ δ ≤ 100×), а также блок цифровой HD-видеокамеры типа Digital Camera на 50–60 Megapixel и высоким уровнем разрешения не менее 3000×3000 pixel [1―4].
Микропанорама датчика и выпуклый, объёмный монитор произведены на базе уменьшенной копии панорамы визуализации и фиксации обнаружения противника и иной цели, от модернизированных РЛС-300, РЛС-500 и РЛС-1500, успешно применяющихся в ВКС, войсках ПВО и системах ПРО России [5―10].
Блок оптического стабилизатора точного наведения и горизонтально-вертикаль-ного положения в пространстве выполнен на основе гироскопной технологии [2―4].
Между компьютером 20 и блоком АЦП-ЦАП 21 выполнена ОС для анализа и амплитудно-частотной коррекции выходных импульсов управления, позволяющая программному обеспечению (ПО) оперативно регулировать тактовую частоту следования управляющих импульсов, поступающих из блока АЦП-ЦАП 21 на затворы коммутирующих устройств – ключей VT1 и/или VT2, расположенного внутри, каждой первой, положительной и второй, отрицательной лазерных панорам 6 и 7 [2―4].
Предлагаемый датчик работает следующим образом. Сеанс радиопеленгации цели и обнаружения потенциального противника осуществляют в условиях только прямой, электромагнитной видимости, в невидимой части спектра поперечных электромагнитных волн (чаще всего в ИК-диапазоне). За редким исключением возможен ультрафиолетовый (УФ)-диапазон, который не применим в среде озонового слоя атмосферы Земли, из-за сильного поглощения волн средой озона. Информационный сигнал закодирован программой в программном комплексе радиомолчания “Ладога-1М”, организационно собранного из компьютера 20 и монитора 22, специальным военным кодером-шифровальщиком и передаваться в блок входного, трёхкаскадного усилителя НЧ (находится внутри лазерных панорам 6 и 7), в котором также может быть в наличии входной, предварительный усилитель видеосигналов, а также блок специального кодера цветного изображения. Далее радиосигнал из блока предварительного входного усилителя НЧ, передаётся окончательно в блок оконечного, двухтактного усилителя мощности (блок-УМ, также находится внутри лазерных панорам 6 и 7!), где он усиленный, как аналоговый сигнал, до своего максимально-номинального значения поступает в многоканальный блок АЦП-ЦАП 21, для преобразования последнего в цифровой формат, необходимого для формирования импульсов управления и последующую их передачу на управляющий электрод ― затворы коммутирующих устройств – ключей VT1 и VT2 [2―4].
Блок АЦП-ЦАП 21 является многоканальным преобразователем (translator), поступающих сигналов из аналогового формата в цифровой и обратно, с последующей передачей в компьютер 20, где программы по обработке входных данных, в цифровом формате, ПО “Ладога”, производят анализ, сравнение и амплитудно-частотную коррекцию импульсов управления для последующей передачи необходимых команд в третий канал (рис. 1) [2―4].
Аналоговый сигнал поступает из оптического датчика регулируемого коллиматора 3―4―5 в блок самонаведения и удержания цели по модулированному, телескопическому, лазерному лучу в ИК-диапазоне электромагнитных волн и одновременно получает команды внешней системы обнаружения и целеуказания, коррекции с помощью управляющих импульсов, поступающих из блока АЦП-ЦАП 21 [2―4].
- Сторощук О.Б., Коршунов А.И. Устройство лучевого наведения управляемого объекта. Патент РФ на изобретение RU: 2267733, М.: ФИПС РФ, 10.01.2006 г.
- Григорьев-Фридман С.Н. Переговорное устройство “Луч” в оптическом диапазоне, в режиме “радиомолчания”. // Машиностроитель / Сер. Связь, М.: Вираж-Центр, № 3, 2016. С. 29–40.
- Григорьев-Фридман С.Н. Мобильное переговорное устройство на базе лазерного диода. // Машиностроитель / Сер. Связь, М.: Вираж-Центр, № 4, 2017. С. 39–48.
- Григорьев-Фридман С.Н. Мобильное переговорное устройство на базе твёрдотельного лазера с накачкой лазерным диодом. // Машиностроитель / Сер. Связь, М.: Вираж-Центр, № 5, 2017. С. 26–34.
- Ефремов А., Омельянчук А. Хранители неба. // Воздушно-космическая сфера, №3/4(88/89), декабрь 2016, М.: Вневедомственный экспертный совет по вопросам воздушно-космической сферы. С. 64-68.
- Ольгин С. Проблемы оптоэлектронного противодействия (по взглядам зарубежных военных специалистов).// Зарубежное военное обозрение, М.: Красная звезда, № 9, 2002. С. 35–41.
- Семёнов А. Защита гражданских самолётов от зенитных ракет. // Зарубежное военное обозрение, М.: Красная звезда, № 12, 2002. С. 35.
- Григорян В.А., Юдин Е.Г., Терехин И.И. и др. Защита танков. / под ред. В.А. Григоряна. М.: МГТУ им. Н.Э. Баумана, 2007, 327 с.
- Спасский Н., Иванов С. Оптико-электронные системы и лазерная техника: Энциклопедия XXI век. Том 11, М.: Оружие и технологии, 2005, 720 с.
- Щербак Н. Противодействие зенитным управляемым ракетам с инфракрасным наведением (современные бортовые средсва).// Электроника: Наука. Технология. Бизнес, № 5, 2000. С. 52–55.